 RTOS为什么要搞两种API?
RTOS为什么要搞两种API?

本文以FreeRTOS为例,如果我们自己在官网下载源码然后手动移植代码就是使用FreeRTOS的原生API接口,如果我们使用STM32CubeMX来配置工程就是使用的CMSIS-API接口,是对FreeRTOS的原生API接口进行了封装。
一、RTOS为什么要搞两种API?
CMSIS-RTOS API是ARM公司为RTOS内核制定的一套通用接口协议,它提供了一套「标准的API接口」,可以移植到各种各样的RTOS上,使得上层的软件、中间件、库以及其他组件在不同的RTOS之上都可以正常工作。
简单的说就是:STM32是ARM内核的,这大家都知道。FreeRTOS是一种免费的开源的嵌入式操作系统。那它肯定就不属于ARM公司的对不对?这也很好理解。现在你要在我ARM内核上面使用不是我的RTOS产品,那么我ARM公司就要把你这个RTOS给打包一遍,封装成属于我的适合我的API接口协议类型的CMSIS-RTOS API。这样解释应该好一点。
在STM32上使用FreeRTOS,可以直接使用FreeRTOS的原生接口(原生API),源码移植就是使用的是原生API接口,这无可厚非。你也可以选择CMSIS接口,实际上CMSIS接口和原生接口都是类似的,但是如果你学会了CMSIS的RTOS接口之后,也能自学对应的原生接口,当然还是有区别的,因此还是需要花时间去熟悉的。
学会了CMSIS的最大好处就是,只要其它RTOS有提供CMSIS接口,我们就可以直接使用CMSIS接口,而不需要再花时间去了解原生接口。比如我们在学习UCOS时,发现UCOS的API和FreeRTOS的API不同,是因为我们学的都是它们原生的API,就是我们下载源码后在keil中移植的那种。但是如果我们学会了CMSIS-API,那么不管以后学习哪一个OS,只要这个OS提供了CMSIS的接口,我们就直接可以用CMSIS的API来调用学习,而不需要再花时间去了解原生接口。
STM32CubeMX在提供FreeRTOS时也提供了CMSIS接口,后面具体举例时就可以看到封装的.c文件,总之ST对FreeRTOS封装出了CMSIS接口。
二、使用CubeMX配置FreeRTOS
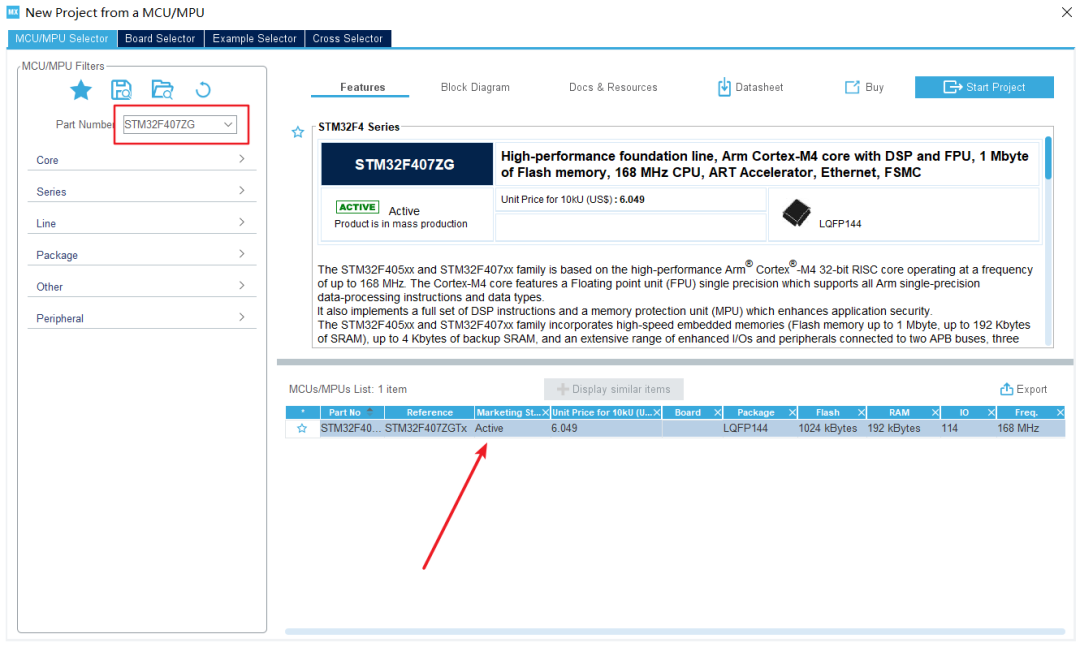
以STM32F407ZGT6芯片为例,使用CubeMX配置FreeRTOS。
1、新建工程
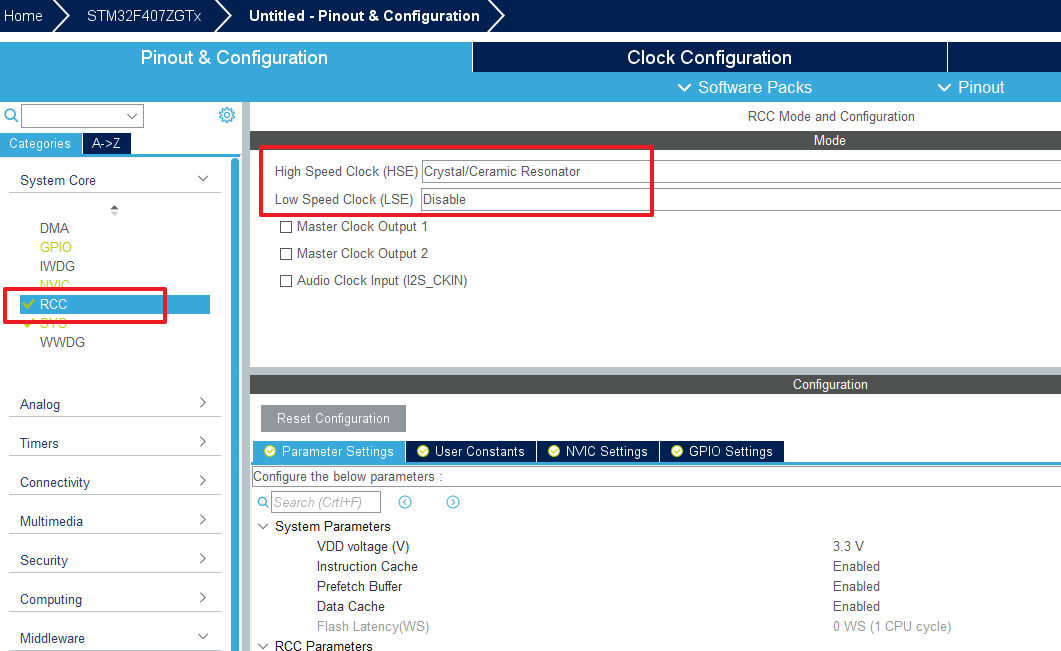
2、外部晶振
选择外部晶振
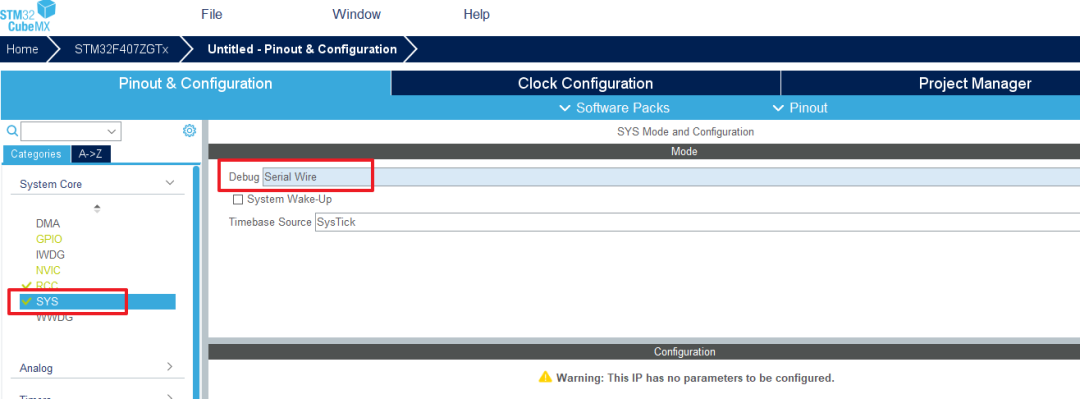
4、下载器
选择四线的SWD接口下载器。
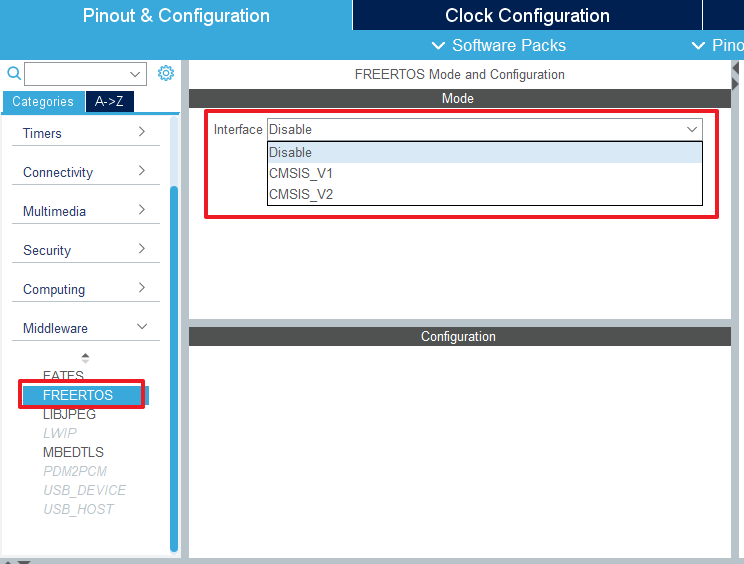
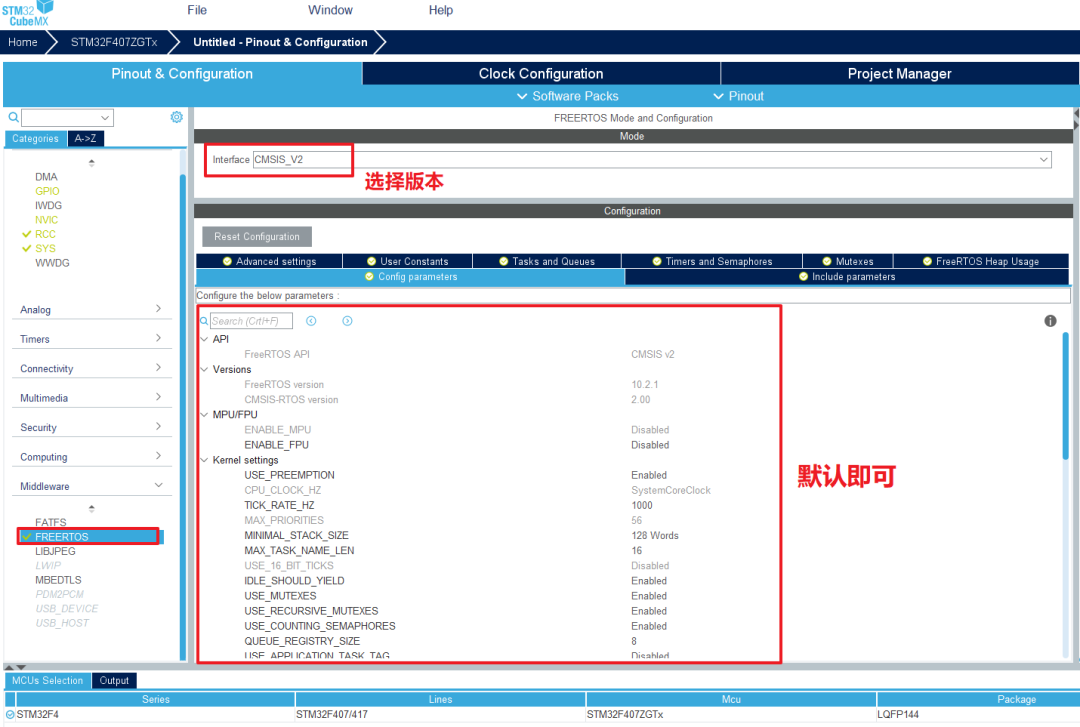
5、打开FreeRTOS
这里可以看到STM32CubeMX只提供了一种RTOS就是FreeRTOS,并且提供的是CMSIS接口API,并没有提供原生的API,所以如果你想学习原生API就必须学会手动移植源码,使用STM32CubeMX来创建工程就必须使用ARM公司的CMSIS API
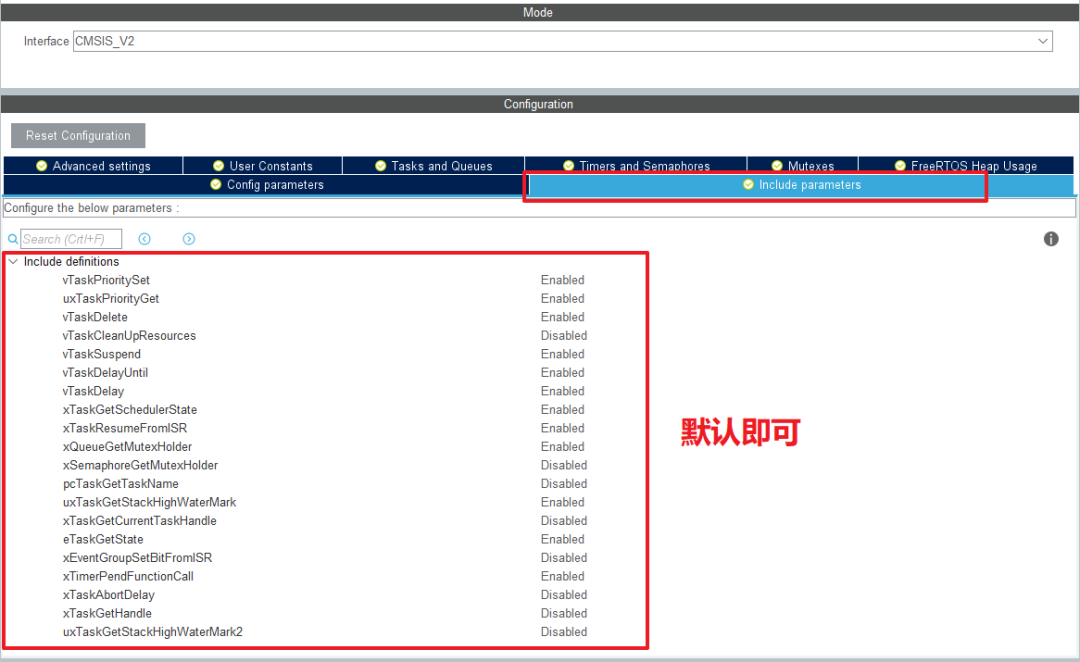
这一个与FreeRTOS的原生接口有关,大家凡是看到v打头、x打头的函数,都是FreeRTOS的原生函数,我们现在要使用的是对原生接口封装后的CMSIS API,通过Include paramter的配置可以决定哪些原生接口被使用,哪些不被使用,不过有关Include paramters中的内容,一般情况下使用默认设置即可。
User Constant
在该这栏目中可以添加宏定义,添加后就会在代码中自动生成宏定义的代码,但是我们一般不会这样添加,我们需要定义什么宏定义,我们一般都是直接在代码中编写。

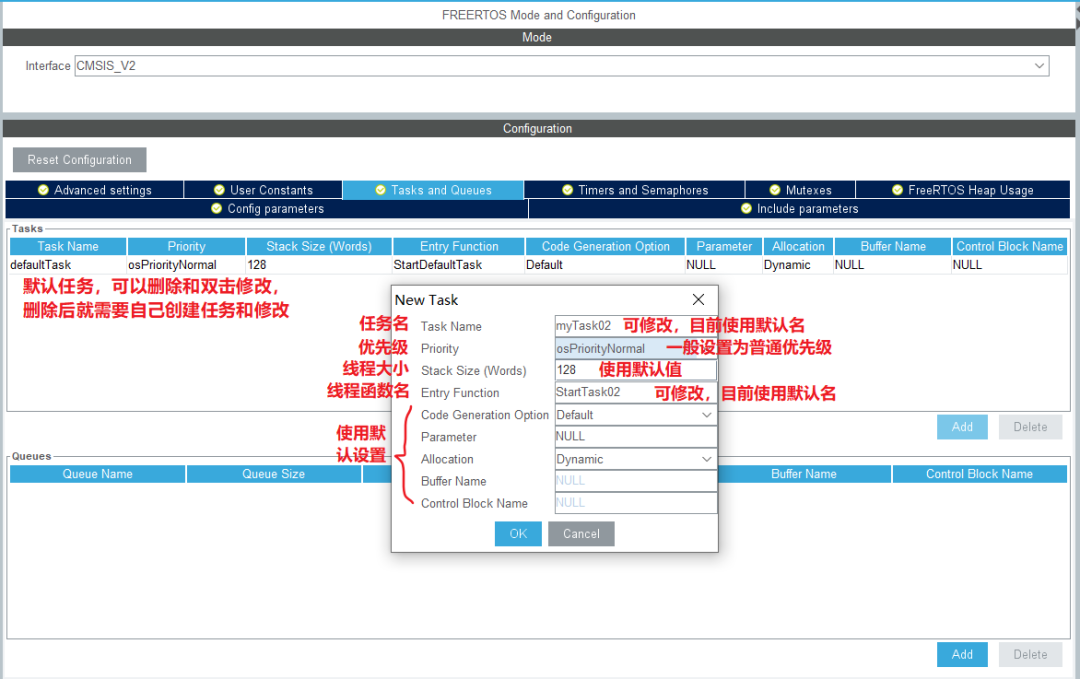
Task and Queues
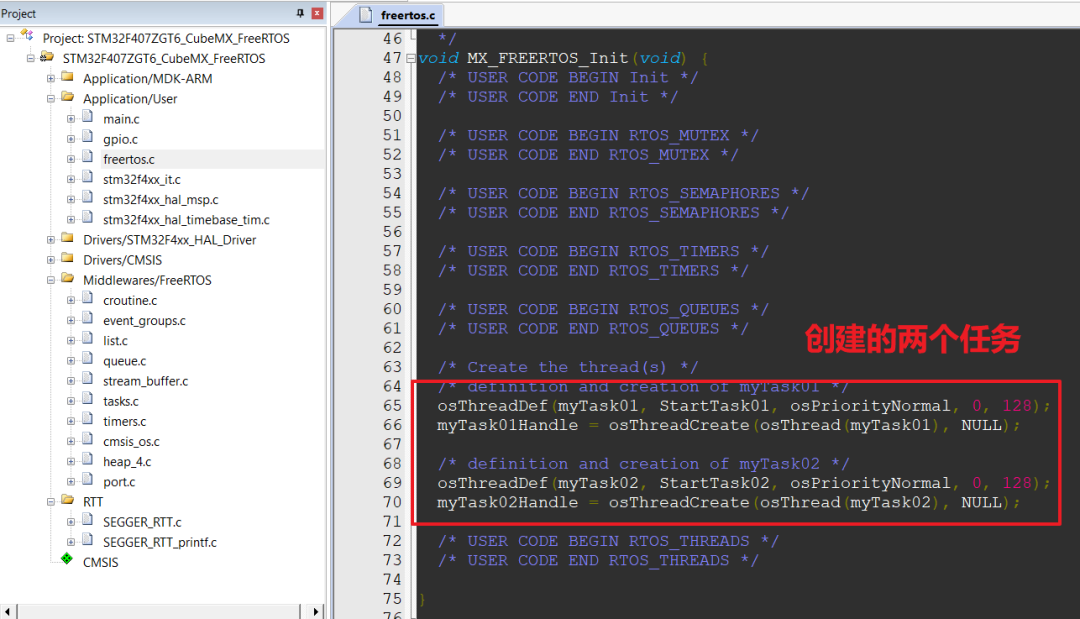
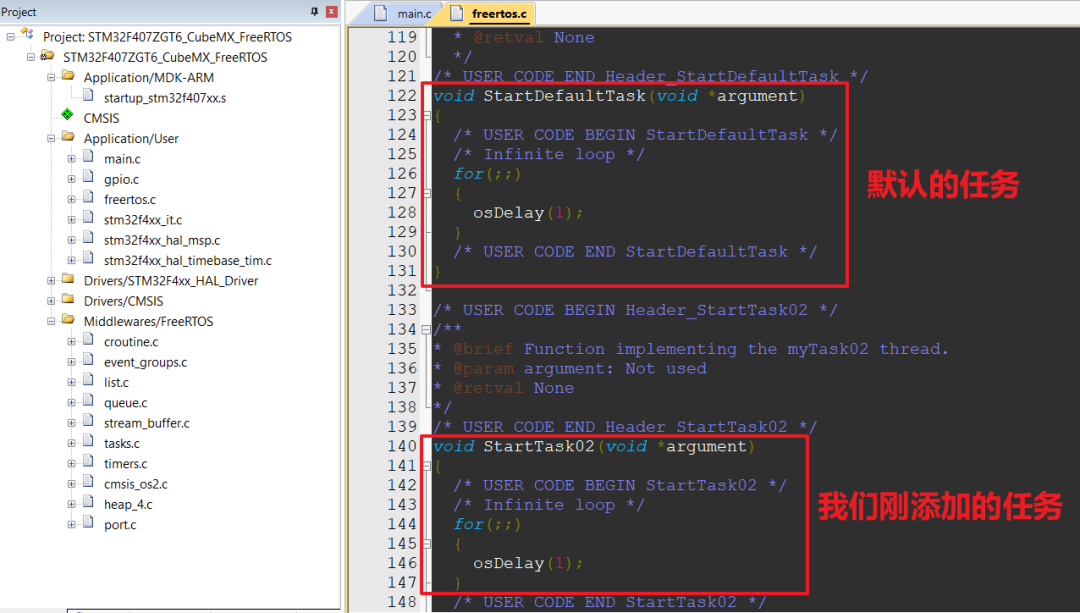
在这一个栏目中,我们可以添加任务(线程),自动生成代码时就会生成创建任务(线程)的代码,一般会有一个默认任务,如果需要的话我们可以额外添加一个任务,当然我们也可以自己去写这些创建任务的代码。
添加一个任务(线程),默认任务+添加的任务,目前我们有两个任务,创建工程时会自动生成创建这两个任务的代码。
添加之前
添加之前
添加之后
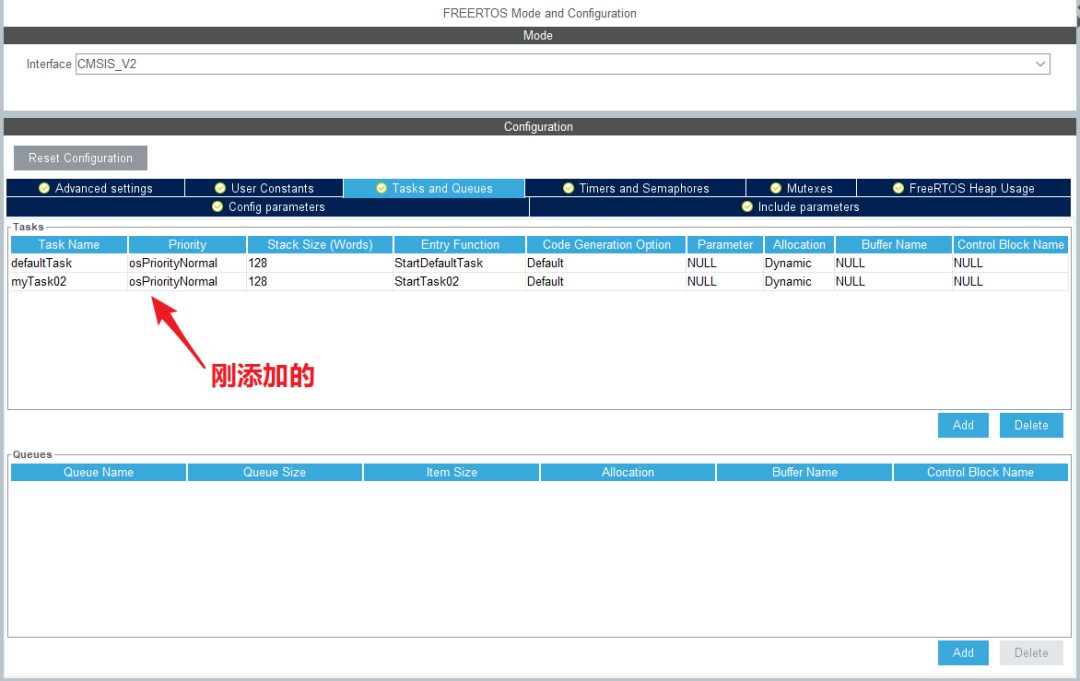
添加之后
Timers and Semaphores
通过该栏目可以添加软件定时器、互斥锁和信号量,然后就可以自动生成软件定时器、互斥锁和信号量的代码,但是一般情况是在写代码时我们自己添加相应的代码,而不是自动生成能,所以这个栏目不配置。

目前不添加定时器、互斥锁和信号量,编程时在代码中添加。
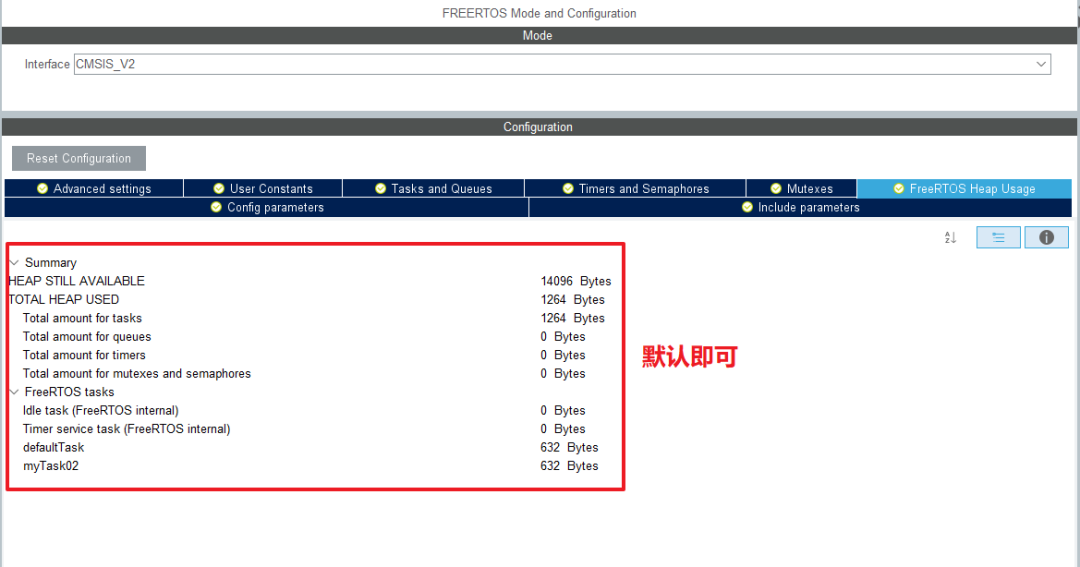
FreeRTOS Heap Usage(堆设置)
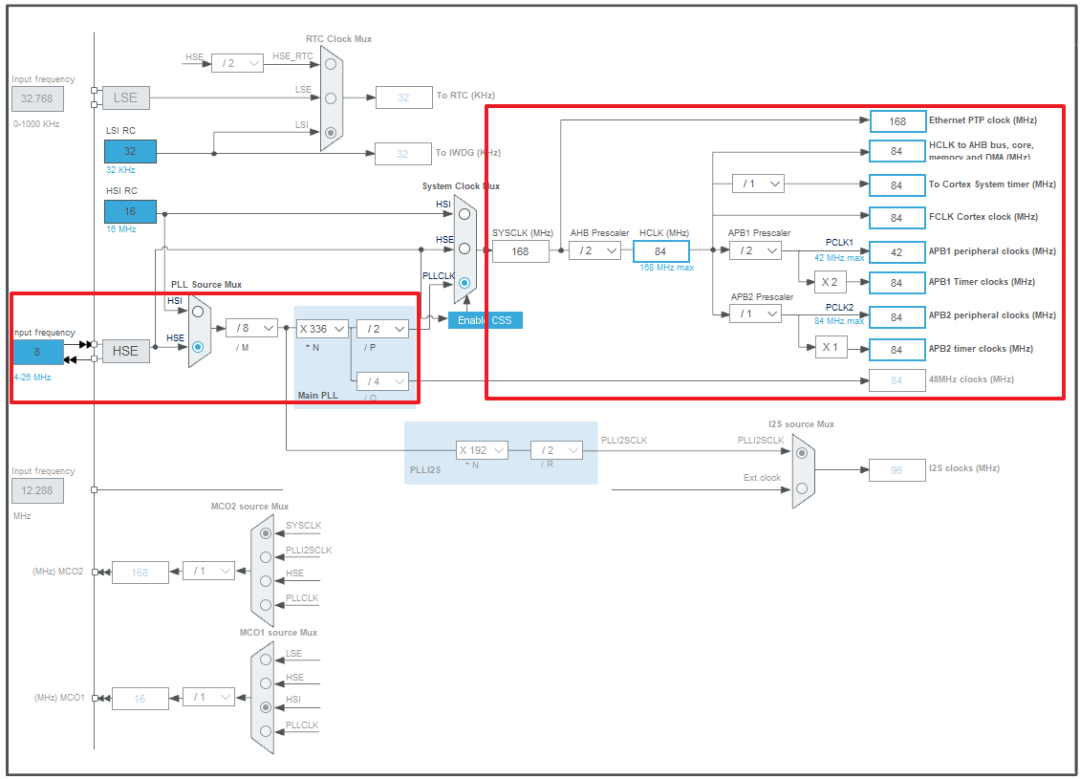
6、时钟配置
Fvco:VCO频率 SYSCLK:系统时钟频率 Fusb:USB,SDIO,RNG等的时钟频率 Fs:PLL输入时钟频率,可以是HSI,HSE等. plln:主PLL倍频系数(PLL倍频),取值范围:64~432. pllm:主PLL和音频PLL分频系数(PLL之前的分频),取值范围:2~63. pllp:系统时钟的主PLL分频系数(PLL之后的分频),取值范围:2,4,6,8.(仅限这4个值!) pllq:USB/SDIO/随机数产生器等的主PLL分频系数(PLL之后的分频),取值范围:2~15.
外部晶振为8M的时候,推荐值:plln=336,pllm=8,pllp=2
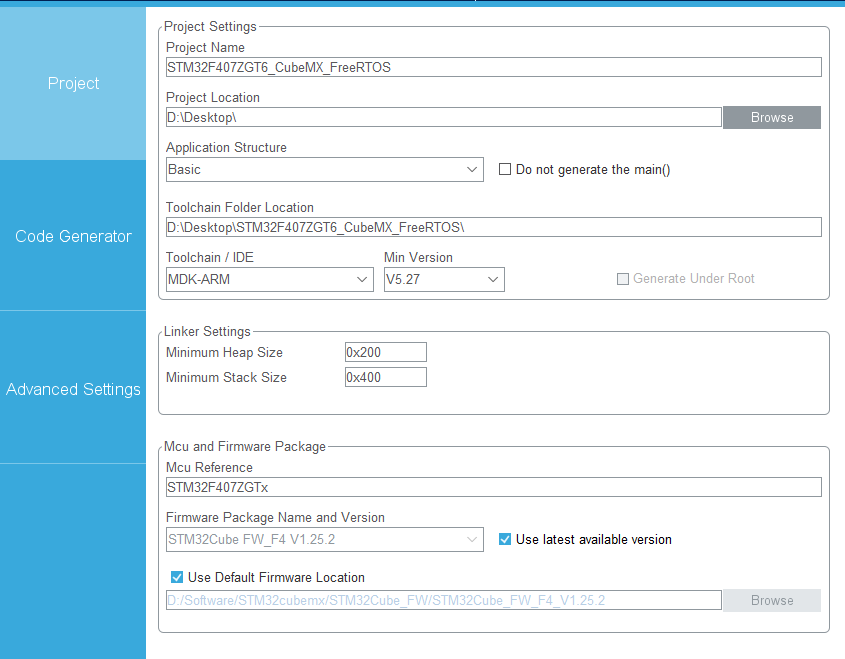
7、工程设置
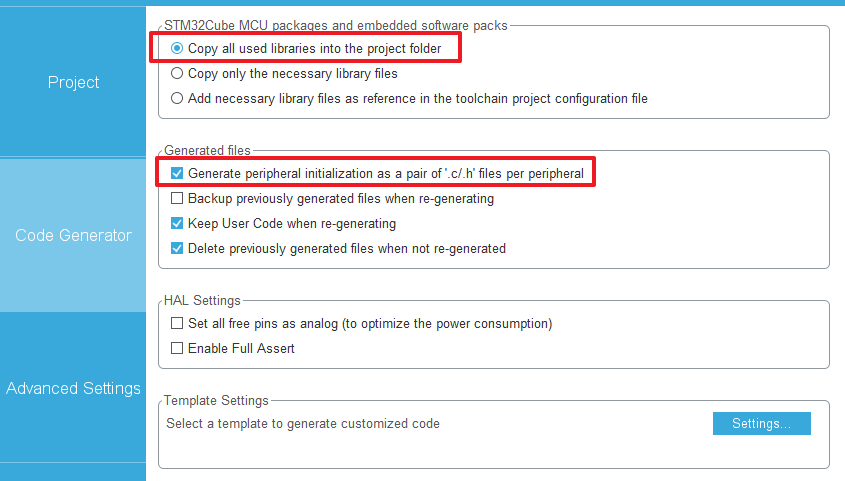
8、生成代码
建议勾选上分文件管理。我们在生成代码的时候,出现了如下提示,我们这里需要解决这个警告,否者会出问题。
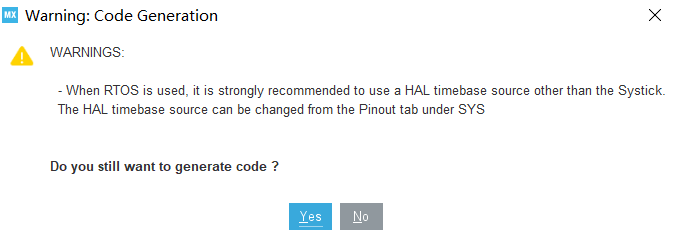
前面介绍FreeRTOS时说过,FreeRTOS线程切换的本质就是定时器定一个时间,定的时间到了就切换运行其它线程,在默认情况下会使用Systick来作为RTOS的时间片定时器,这里不凑巧的是HAL 库代码已经使用了 Systick,所以上面警告就是告诉你冲突了,我们需要解决这个冲突。
如何解决冲突?
先点击“否”,将 sys 中的 Systick 换成其它定时器,比如tim1,RTOS就使用 tim1来做自己的Systick。
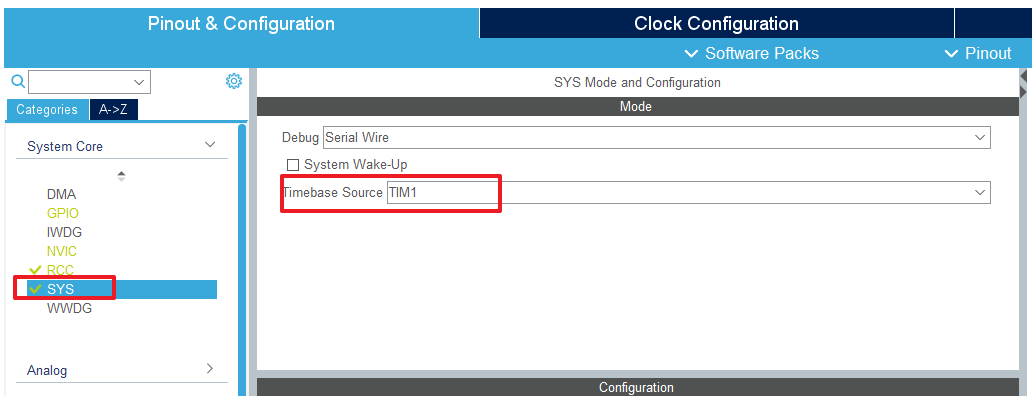
做了以上设置后在生成代码时就不会再出现前面所提到的警告。
FreeRTOSConfig.h
在生成的工程项目中的头文件目录下有一个FreeRTOSConfig.h,如果是源码移植的话,我们应该修改这一个.h来设置我们需要的配置,但是CubeMx提供了图形化的配置界面,也就是我们前面所介绍的内容,我们进行了前面的配置后,关键配置信息就会记录到这个.h中,最后 FreeRTOS在工作时就会使用到.h 中的相关配置。
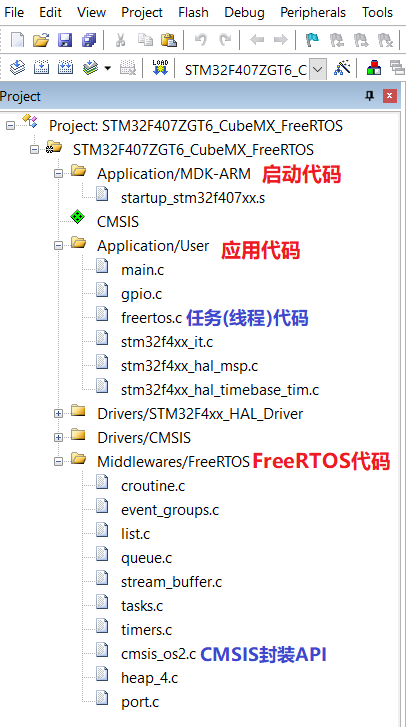
3、工程文件介绍
CMSIS API
CMSIS API
怎么样是不是跟我们使用原生API创建的任务函数有点不一样,那是肯定不一样的。但是要明白这种方式只不过是给FreeRTOS原生的API穿上了一件华丽的外衣而已,函数内部其实还是调用的原生API,只不过没让你看见而已。
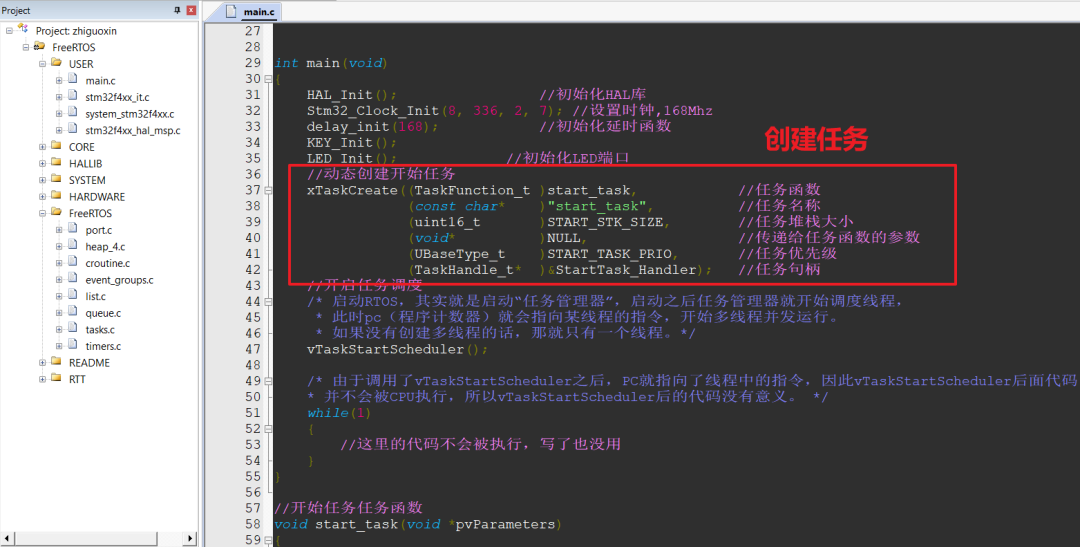
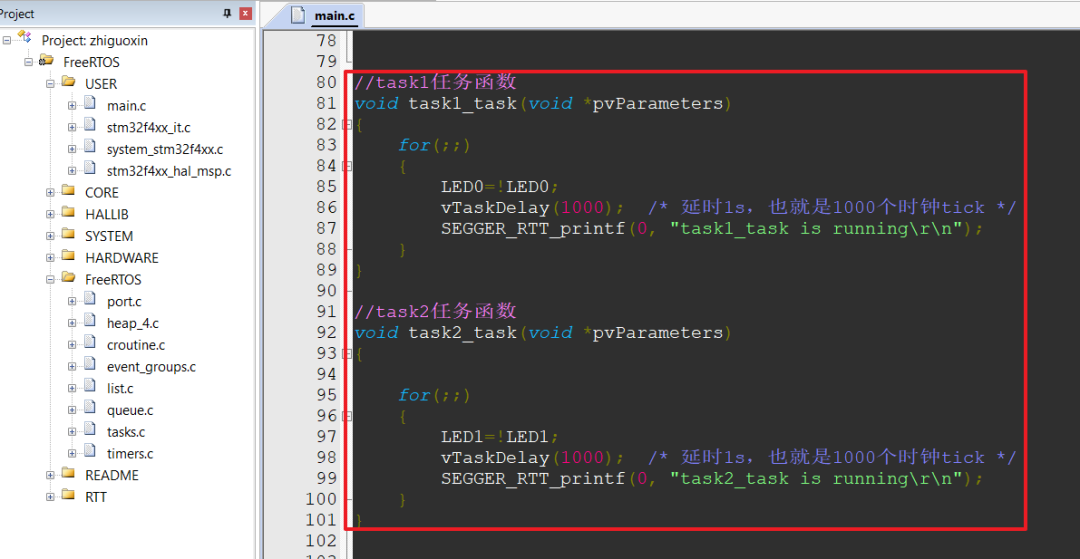
原生API
原生API
不管是CMSIS API还是原生API函数的创建过程基本是一样的,只不过函数不一样,所以也不要太过纠结使用哪一种API,后期这两种API都会分析它们之间的不同,包括消息队列、信号量、互斥量等等!
CMSIS API函数主要有:
SignalEvents//信号 osSignalSet:Setsignalflagsofathread. osSignalClear:Resetsignalflagsofathread. osSignalWait:Suspendexecutionuntilspecificsignalflagsareset. Mutexes//互斥锁 osMutexCreate:Defineandinitializeamutex. osMutexWait:ObtainamutexorWaituntilitbecomesavailable. osMutexRelease:Releaseamutex. osMutexDelete:Deleteamutex. Semaphores//信号量 osSemaphoreCreate:Defineandinitializeasemaphore. osSemaphoreWait:ObtainasemaphoretokenorWaituntilitbecomesavailable. osSemaphoreRelease:Releaseasemaphoretoken. osSemaphoreDelete:Deleteasemaphore. MemoryPool//内存池 osPoolCreate:Defineandinitializeafix-sizememorypool. osPoolAlloc:Allocateamemoryblock. osPoolCAlloc:Allocateamemoryblockandzero-setthisblock. osPoolFree:Returnamemoryblocktothememorypool. MessageQueue//消息队列 osMessageCreate:Defineandinitializeamessagequeue. osMessagePut:Putamessageintoamessagequeue. osMessageGet:Getamessageorsuspendthreadexecutionuntilmessagearrives. MailQueue//邮箱队列 osMailCreate:Defineandinitializeamailqueuewithfix-sizememoryblocks. osMailAlloc:Allocateamemoryblock. osMailCAlloc:Allocateamemoryblockandzero-setthisblock. osMailPut:Putamemoryblockintoamailqueue. osMailGet:Getamailorsuspendthreadexecutionuntilmailarrives. osMailFree:Returnamemoryblocktothemailqueue.
审核编辑 :李倩
-
接口协议
+关注
关注
5文章
44浏览量
19158 -
操作系统
+关注
关注
37文章
7471浏览量
129859
原文标题:干货|操作系统RTOS为什么要搞两种API?
文章出处:【微信号:电子工程世界,微信公众号:电子工程世界】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
AMC1204有两种封装,SOIC-8和SOIC-16,功能一样吗?为什么要推出两种封装?
求教关于两种单片机控制NRF24L01问题
如何学习RTOS
TI-RTOS API函数Task_construct和Task_creat的作用是什么?
HarmonyOS和OpenHarmony的DevEco两种IDE如何共存?

两种总线数据两种传递形式:PIO、DMA介绍资料下载





评论