 基于STM32的WEB服务器设计
基于STM32的WEB服务器设计

一、环境介绍
网卡:ENC28J60
协议栈: UIP
开发软件:Keil5
二、功能介绍
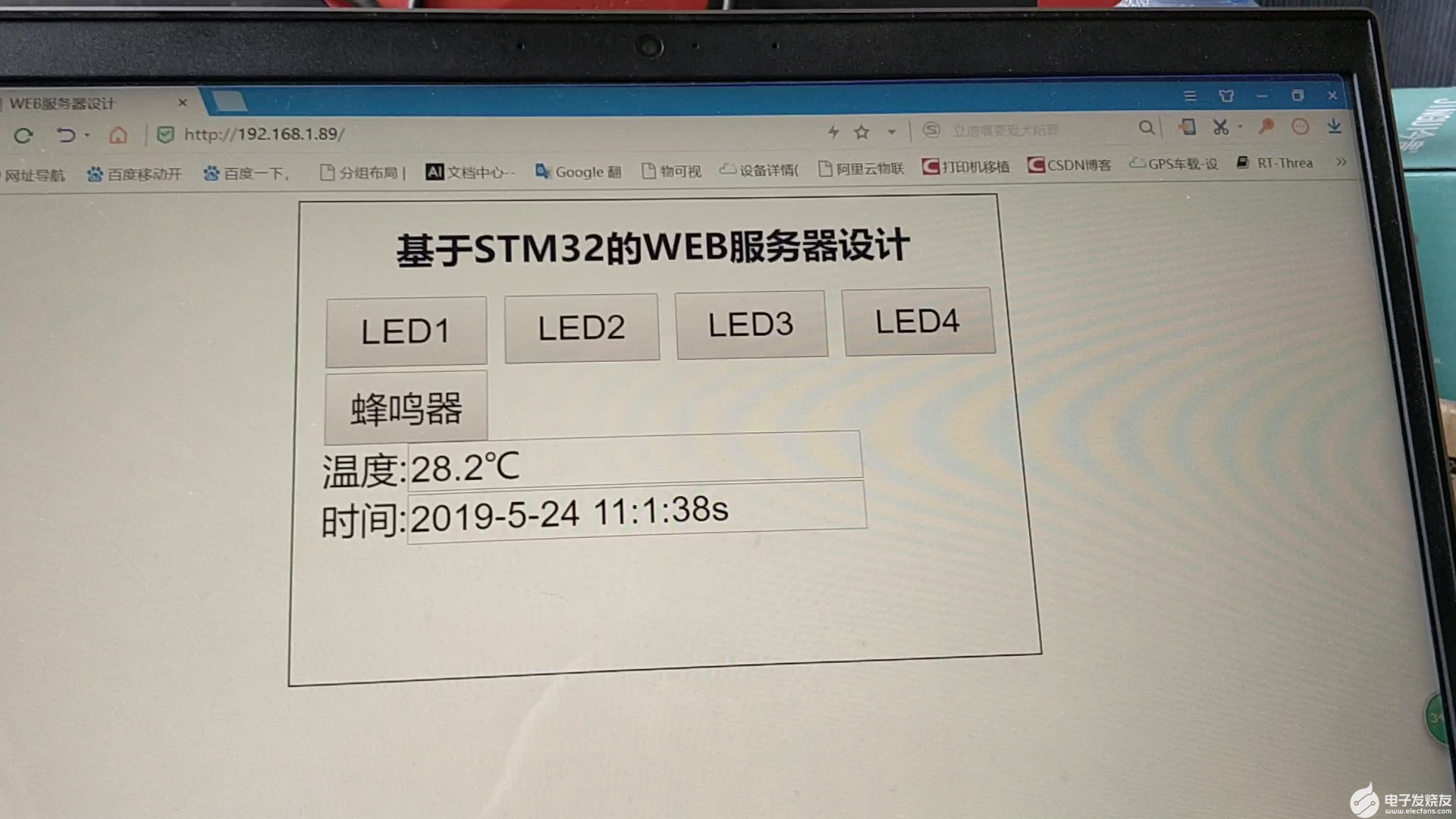
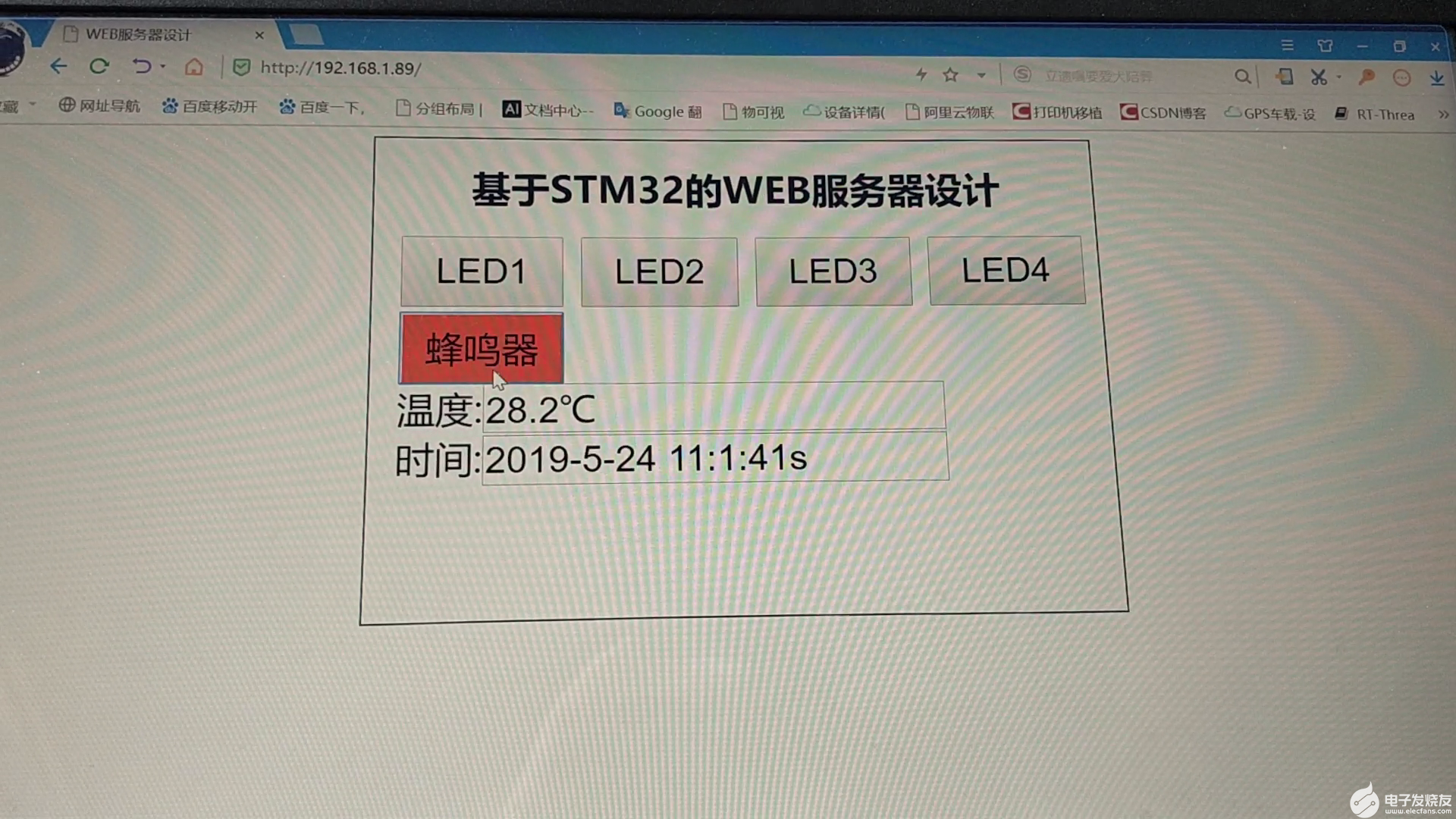
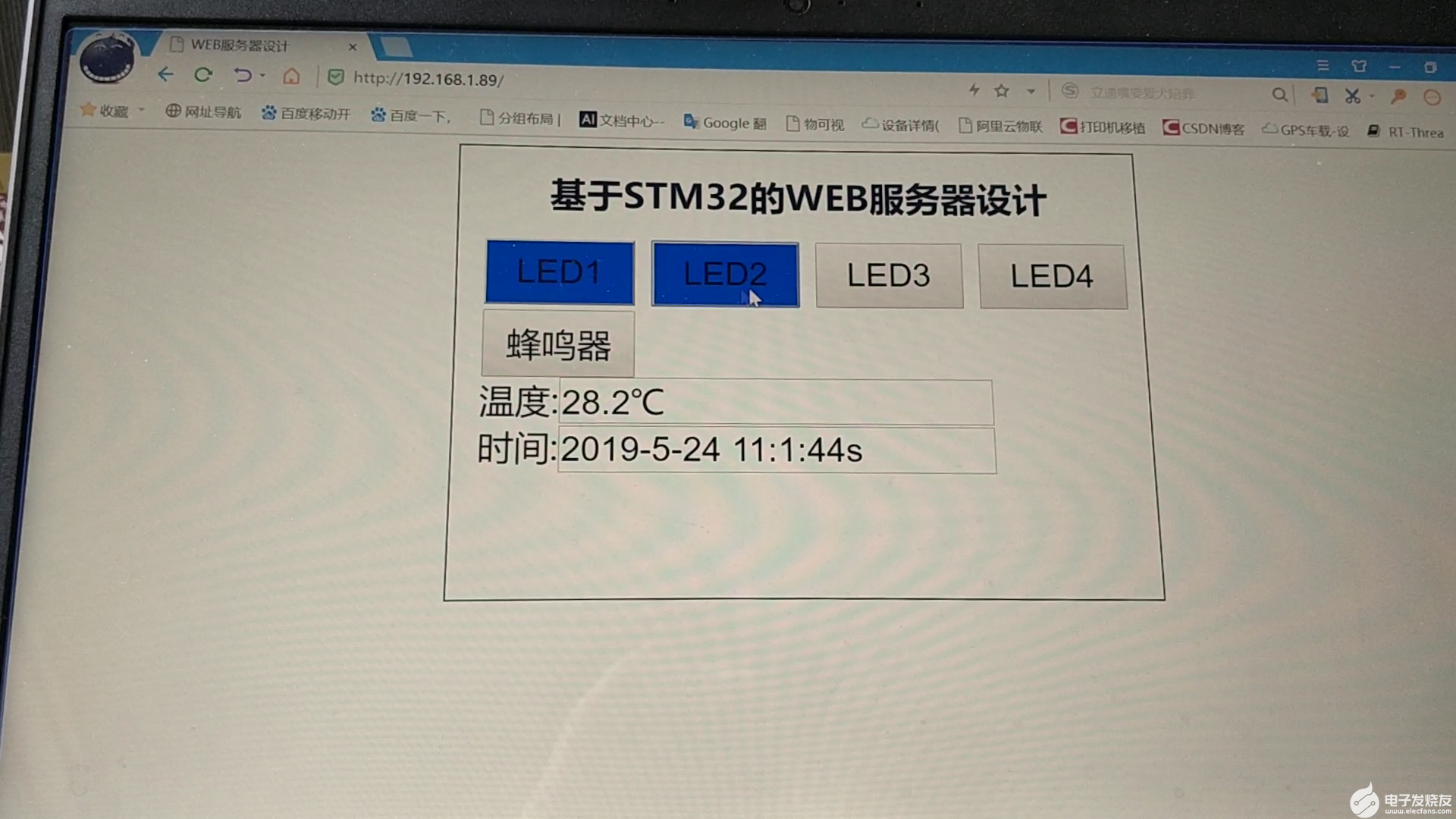
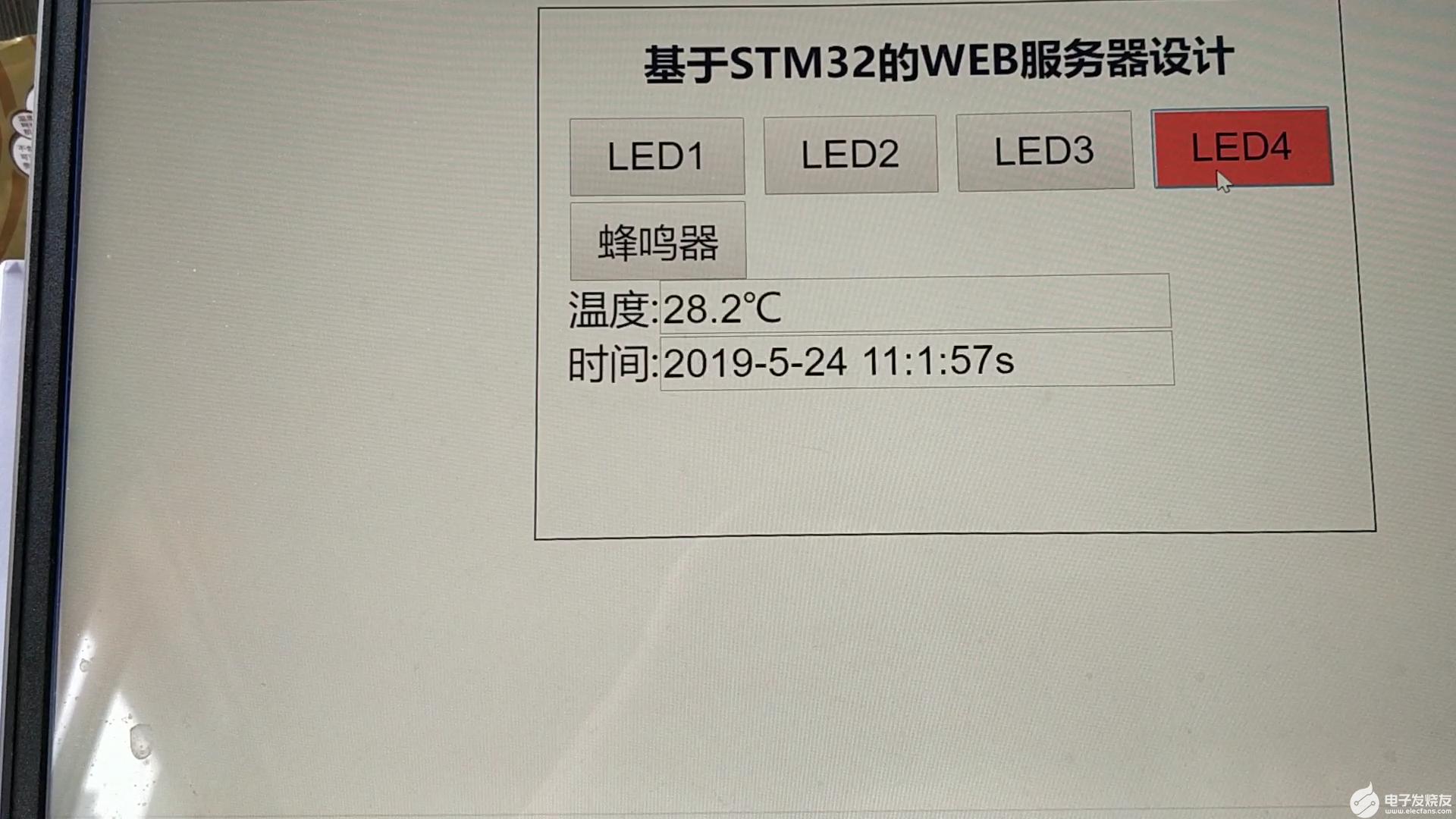
STM32控制ENC28J60+UIP协议栈创建TCP服务器(WEB服务器),支持浏览器访问完成数据传输。 浏览器可以实时显示温度、时间、可以控制STM32开发板上的LED灯、蜂鸣器。

三、ENC28J60芯片介绍
ENC28J60 是带有行业标准串行外设接口(Serial Peripheral Interface,SPI)的独立以太网 控制器。它可作为任何配备有 SPI 的控制器的以太网接口。ENC28J60 符合 IEEE 802.3 的全部规范,采用了一系列包过滤机制以对传入数据包进行限制。 它还提供了一个内部 DMA 模块, 以实现快速数据吞吐和硬件支持的 IP 校验和计算。 与主控制器的通信通过两个中断引脚和 SPI 实现,数据传输速率高达 10 Mb/s。两个专用的引脚用于连接 LED,进行网络活动状态指示。ENC28J60 总共只有 28 脚,提供 QFN/TF。
ENC28J60 的主要特点如下:
兼容 IEEE802.3 协议的以太网控制器
集成 MAC 和 10 BASE-T 物理层支持全双工和半双工模式
数据冲突时可编程自动重发
SPI 接口速度可达 10Mbps
提供快速数据移动的内部 DMA 控制器
可配置的接收和发送缓冲区大小
两个可编程 LED 输出
带7个中断源的两个中断引脚
TTL 电平输入
提供多种封装:SOIC/SSOP/SPDIP/QFN 等。
ENC28J60 由七个主要功能模块组成:
1) SPI 接口,充当主控制器和 ENC28J60 之间通信通道。
2) 控制寄存器,用于控制和监视 ENC28J60。
3) 双端口 RAM 缓冲器,用于接收和发送数据包。
4) 判优器,当 DMA、发送和接收模块发出请求时对 RAM 缓冲器的访问进行控制。
5) 总线接口,对通过 SPI 接收的数据和命令进行解析。
6) MAC(Medium Access Control)模块,实现符合 IEEE 802.3 标准的 MAC 逻辑。
7) PHY(物理层)模块,对双绞线上的模拟数据进行编码和译码。
ENC28J60 还包括其他支持模块,诸如振荡器、片内稳压器、电平变换器(提供可以接受 5V 电压的 I/O 引脚)和系统控制逻辑。
四、UIP 简介
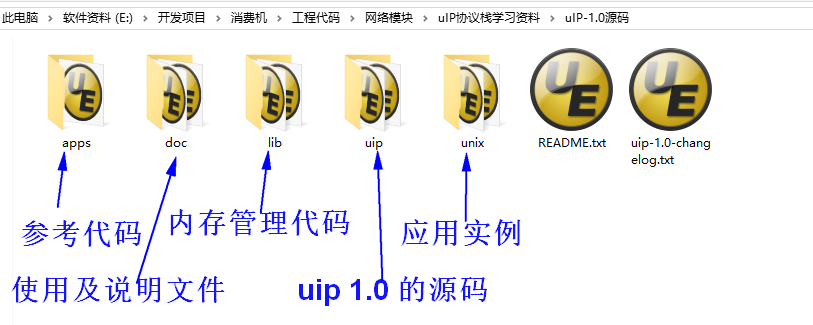
uIP 由瑞典计算机科学学院(网络嵌入式系统小组)的Adam Dunkels 开发。其源代码由C 语 言编写,并完全公开,uIP 的最新版本是 1.0 版本。 uIP 协议栈去掉了完整的 TCP/IP 中不常用的功能,简化了通讯流程,但保留了网络通信 必须使用的协议,设计重点放在了 IP/TCP/ICMP/UDP/ARP 这些网络层和传输层协议上,保证 了其代码的通用性和结构的稳定性。
由于 uIP 协议栈专门为嵌入式系统而设计,因此还具有如下优越功能:
1) 代码非常少,其协议栈代码不到 6K,很方便阅读和移植。
2) 占用的内存数非常少,RAM 占用仅几百字节。
3) 其硬件处理层、协议栈层和应用层共用一个全局缓存区,不存在数据的拷贝,且发送 和接收都是依靠这个缓存区,极大的节省空间和时间。
4) 支持多个主动连接和被动连接并发。
5) 其源代码中提供一套实例程序:web 服务器,web 客户端,电子邮件发送程序(SMTP 客 户端),Telnet 服务器, DNS 主机名解析程序等。通用性强,移植起来基本不用修改就可以通过。
6) 对数据的处理采用轮循机制,不需要操作系统的支持。 由于 uIP 对资源的需求少和移植容易,大部分的 8 位微控制器都使用过uIP 协议栈, 而且很多的著名的嵌入式产品和项目(如卫星,Cisco 路由器,无线传感器网络)中都在使用 uIP 协议栈。 uIP 相当于一个代码库,通过一系列的函数实现与底层硬件和高层应用程序的通讯,对于 整个系统来说它内部的协议组是透明的,从而增加了协议的通用性。
uIP 提供的接口函数有:
1.初始化 uIP 协议栈:uip_init()
2.处理输入包:uip_input()
3.处理周期计时事件:uip_periodic()
4.开始监听端口:uip_listen()
5.连接到远程主机:uip_connect()
6.接收到连接请求:uip_connected()
7.主动关闭连接:uip_close()
8.连接被关闭:uip_closed()
9.发出去的数据被应答:uip_acked()
10.在当前连接发送数据:uip_send()
11.在当前连接上收到新的数据:uip_newdata()
12.告诉对方要停止连接:uip_stop()
13.连接被意外终止:uip_aborted()
五、核心代码
5.1 main.c
#include "stm32f10x.h"
#include "led.h"
#include "delay.h"
#include "key.h"
#include "usart.h"
#include
#include
#include "enc28j60.h"
#include "time.h"
#include "uip.h"
#include "uip_arp.h"
#include "tapdev.h"
#include "timer.h"
#include "uip-conf.h"
#include "httpd.h"
#include "ds18b20.h"
#include "rtc.h"
void uip_EventPoll(void); //事件处理函数
#define UIP_BUF ((struct uip_eth_hdr *)&uip_buf[0])
/*
当Uip接收到Uip接收到底层传递的数据,将接收到的数据通过调用http_appcall(),传递给Webserver处理,
再通过handle_connection()先后调用handle_input()函数和handle_output()函数
handle_input()主要作用是分析http数据流:得到请求的路径、解析出请求的文件名称。
然后调用函数handle_output进行查找对应文件,进行发送到浏览器,完成交互。
注意:浏览器最好使用谷歌浏览器,否则会导致访问失败!
*/
int main()
{
u8 key;
u32 tcnt=0;
uip_ipaddr_t ipaddr; //保存IP地址信息
BeepInit(); //蜂鸣器初始化
LedInit(); //LED灯初始化
UsartInit(USART1,72,115200);
KeyInit(); //按键初始化
TimerInit(TIM6,72,10000); //定时器初始化,
DS18B20_Init();
RTC_Init();
SET_RTC_TIME(2019,5,24,10,58,20);
printf("串口工作正常!rn");
while(tapdev_init()) //初始化ENC28J60错误
{
printf("ENC28J60 Init Error!rn");
Delay72M_Ms(500);
}
printf("ENC28J60 初始化成功!rn");
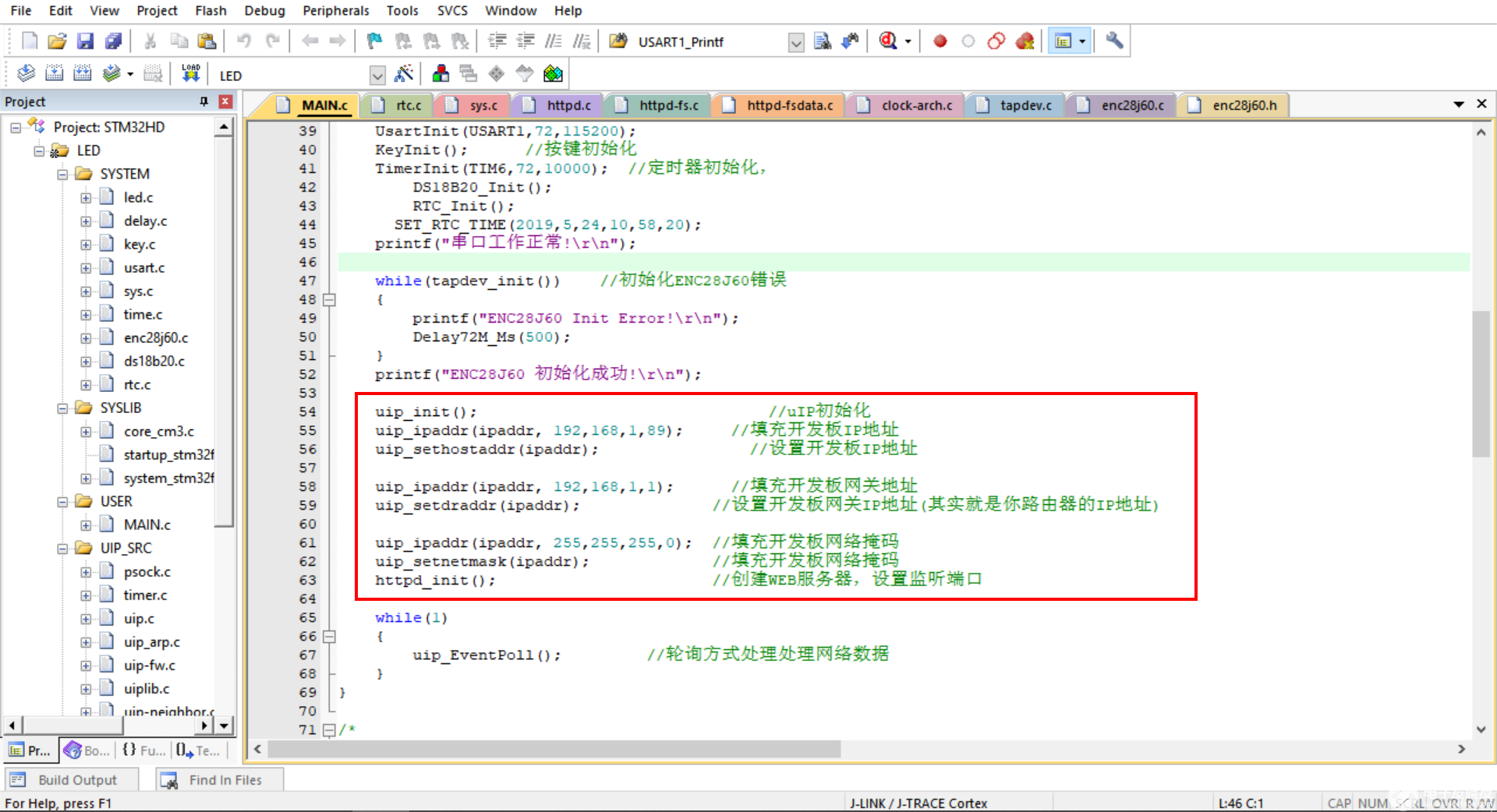
uip_init(); //uIP初始化
uip_ipaddr(ipaddr, 192,168,1,89); //填充开发板IP地址
uip_sethostaddr(ipaddr); //设置开发板IP地址
uip_ipaddr(ipaddr, 192,168,1,1); //填充开发板网关地址
uip_setdraddr(ipaddr); //设置开发板网关IP地址(其实就是你路由器的IP地址)
uip_ipaddr(ipaddr, 255,255,255,0); //填充开发板网络掩码
uip_setnetmask(ipaddr); //填充开发板网络掩码
httpd_init(); //创建WEB服务器,设置监听端口
while(1)
{
uip_EventPoll(); //轮询方式处理处理网络数据
}
}
/*
函数功能:uip事件处理函数,需要将该函数插入用户主循环,循环调用
*/
void uip_EventPoll(void)
{
u8 i;
static struct timer arp_timer; //定义定时器
static u8 timer_ok=0;
if(timer_ok==0)//仅初始化一次
{
timer_ok = 1;
timer_set(&arp_timer,CLOCK_SECOND*10); //创建1个10秒的定时器
}
uip_len=tapdev_read(); //从网络设备读取一个IP包,得到数据长度.uip_len在uip.c中定义
if(uip_len>0) //有数据
{
//处理IP数据包(只有校验通过的IP包才会被接收)
if(UIP_BUF->type == htons(UIP_ETHTYPE_IP))//是否是IP包?
{
uip_arp_ipin(); //去除以太网头结构,更新ARP表
uip_input(); //IP包处理
//当上面的函数执行后,如果需要发送数据,则全局变量 uip_len > 0
//需要发送的数据在uip_buf, 长度是uip_len (这是2个全局变量)
if(uip_len>0)//需要回应数据
{
uip_arp_out();//加以太网头结构,在主动连接时可能要构造ARP请求
tapdev_send();//发送数据到以太网
}
} else if (UIP_BUF->type==htons(UIP_ETHTYPE_ARP))//处理arp报文,是否是ARP请求包?
{
uip_arp_arpin();
//当上面的函数执行后,如果需要发送数据,则全局变量uip_len>0
//需要发送的数据在uip_buf, 长度是uip_len(这是2个全局变量)
if(uip_len>0)tapdev_send();//需要发送数据,则通过tapdev_send发送
}
}
//轮流处理每个TCP连接, UIP_CONNS缺省是40个
for(i=0; i0
//需要发送的数据在uip_buf, 长度是uip_len (这是2个全局变量)
if(uip_len>0)
{
uip_arp_out();//加以太网头结构,在主动连接时可能要构造ARP请求
tapdev_send();//发送数据到以太网
}
}
//每隔10秒调用1次ARP定时器函数 用于定期ARP处理,ARP表10秒更新一次,旧的条目会被抛弃
if(timer_expired(&arp_timer))
{
timer_reset(&arp_timer);
uip_arp_timer();
}
}
;>
5.2 enc28j60.c
#include "delay.h"
#include
#include "enc28j60.h"
/*
以下是ENC28J60驱动移植接口:
MISO--->PA6----主机输入
MOSI--->PA7----主机输出
SCLK--->PA5----时钟信号
CS----->PA4----片选
RESET-->PG15---复位
*/
#define ENC28J60_CS PAout(4) //ENC28J60片选信号
#define ENC28J60_RST PGout(15) //ENC28J60复位信号
#define ENC28J60_MOSI PAout(7) //输出
#define ENC28J60_MISO PAin(6) //输入
#define ENC28J60_SCLK PAout(5) //时钟线
static u8 ENC28J60BANK;
static u32 NextPacketPtr;
/*
函数功能:底层SPI接口收发一个字节
说 明:模拟SPI时序,ENC28J60时钟线空闲电平为低电平,在第一个下降沿采集数据
*/
u8 ENC28J60_SPI_ReadWriteOneByte(u8 tx_data)
{
u16 cnt=0;
while((SPI1->SR&1<<1)==0) //等待发送区空--等待发送缓冲为空
{
cnt++;
if(cnt>=65530)return 0; //超时退出 u16=2个字节
}
SPI1->DR=tx_data; //发送一个byte
cnt=0;
while((SPI1->SR&1<<0)==0) //等待接收完一个byte
{
cnt++;
if(cnt>=65530)return 0; //超时退出
}
return SPI1->DR; //返回收到的数据
}
/*
函数功能:复位ENC28J60,包括SPI初始化/IO初始化等
MISO--->PA6----主机输入
MOSI--->PA7----主机输出
SCLK--->PA5----时钟信号
CS----->PA4----片选
RESET-->PG15---复位
*/
void ENC28J60_Reset(void)
{
/*开启时钟*/
RCC->APB2ENR|=1<<12; //开启SPI1时钟
RCC->APB2ENR|=1<<2; //PA
GPIOA->CRL&=0X0000FFFF; //清除寄存器
GPIOA->CRL|=0XB8B30000;
GPIOA->ODR|=0XF<<4; // 上拉--输出高电平
GPIOA->ODR&=~(1<<5);
RCC->APB2ENR|=1<<8; //2 3 4 5 6 7 8
GPIOG->CRH&=0x0FFFFFFF;
GPIOG->CRH|=0x30000000;
/*SPI2基本配置*/
SPI1->CR1=0X0; //清空寄存器
SPI1->CR1|=0<<15; //选择“双线双向”模式
SPI1->CR1|=0<<11; //使用8位数据帧格式进行发送/接收;
SPI1->CR1|=0<<10; //全双工(发送和接收);
SPI1->CR1|=1<<9; //启用软件从设备管理
SPI1->CR1|=1<<8; //NSS
SPI1->CR1|=0<<7; //帧格式,先发送高位
SPI1->CR1|=0x1<<3;//当总线频率为36MHZ时,SPI速度为18MHZ,高速。
SPI1->CR1|=1<<2; //配置为主设备
SPI1->CR1|=1<<1; //空闲状态时, SCK保持高电平。
SPI1->CR1|=1<<0; //数据采样从第二个时钟边沿开始。
SPI1->CR1|=1<<6; //开启SPI设备。
//针对ENC28J60的特点(SCK空闲为低电平)修改SPI的设置
SPI1->CR1&=~(1<<6); //SPI设备失能
SPI1->CR1&=~(1<<1); //空闲模式下SCK为0 CPOL=0
SPI1->CR1&=~(1<<0); //数据采样从第1个时间边沿开始,CPHA=0
SPI1->CR1|=1<<6; //SPI设备使能
ENC28J60_RST=0; //复位ENC28J60
DelayMs(10);
ENC28J60_RST=1; //复位结束
DelayMs(10);
}
/*
函数功能:读取ENC28J60寄存器(带操作码)
参 数:op:操作码
addr:寄存器地址/参数
返 回 值:读到的数据
*/
u8 ENC28J60_Read_Op(u8 op,u8 addr)
{
u8 dat=0;
ENC28J60_CS=0;
dat=op|(addr&ADDR_MASK);
ENC28J60_SPI_ReadWriteOneByte(dat);
dat=ENC28J60_SPI_ReadWriteOneByte(0xFF);
//如果是读取MAC/MII寄存器,则第二次读到的数据才是正确的,见手册29页
if(addr&0x80)dat=ENC28J60_SPI_ReadWriteOneByte(0xFF);
ENC28J60_CS=1;
return dat;
}
/*
函数功能:读取ENC28J60寄存器(带操作码)
参 数:
op:操作码
addr:寄存器地址
data:参数
*/
void ENC28J60_Write_Op(u8 op,u8 addr,u8 data)
{
u8 dat = 0;
ENC28J60_CS=0;
dat=op|(addr&ADDR_MASK);
ENC28J60_SPI_ReadWriteOneByte(dat);
ENC28J60_SPI_ReadWriteOneByte(data);
ENC28J60_CS=1;
}
/*
函数功能:读取ENC28J60接收缓存数据
参 数:
len:要读取的数据长度
data:输出数据缓存区(末尾自动添加结束符)
*/
void ENC28J60_Read_Buf(u32 len,u8* data)
{
ENC28J60_CS=0;
ENC28J60_SPI_ReadWriteOneByte(ENC28J60_READ_BUF_MEM);
while(len)
{
len--;
*data=(u8)ENC28J60_SPI_ReadWriteOneByte(0);
data++;
}
*data='�';
ENC28J60_CS=1;
}
/*
函数功能:向ENC28J60写发送缓存数据
参 数:
len:要写入的数据长度
data:数据缓存区
*/
void ENC28J60_Write_Buf(u32 len,u8* data)
{
ENC28J60_CS=0;
ENC28J60_SPI_ReadWriteOneByte(ENC28J60_WRITE_BUF_MEM);
while(len)
{
len--;
ENC28J60_SPI_ReadWriteOneByte(*data);
data++;
}
ENC28J60_CS=1;
}
/*
函数功能:设置ENC28J60寄存器Bank
参 数:
ban:要设置的bank
*/
void ENC28J60_Set_Bank(u8 bank)
{
if((bank&BANK_MASK)!=ENC28J60BANK)//和当前bank不一致的时候,才设置
{
ENC28J60_Write_Op(ENC28J60_BIT_FIELD_CLR,ECON1,(ECON1_BSEL1|ECON1_BSEL0));
ENC28J60_Write_Op(ENC28J60_BIT_FIELD_SET,ECON1,(bank&BANK_MASK)>>5);
ENC28J60BANK=(bank&BANK_MASK);
}
}
/*
函数功能:读取ENC28J60指定寄存器
参 数:addr:寄存器地址
返 回 值:读到的数据
*/
u8 ENC28J60_Read(u8 addr)
{
ENC28J60_Set_Bank(addr);//设置BANK
return ENC28J60_Read_Op(ENC28J60_READ_CTRL_REG,addr);
}
/*
函数功能:向ENC28J60指定寄存器写数据
参 数:
addr:寄存器地址
data:要写入的数据
*/
void ENC28J60_Write(u8 addr,u8 data)
{
ENC28J60_Set_Bank(addr);
ENC28J60_Write_Op(ENC28J60_WRITE_CTRL_REG,addr,data);
}
/*
函数功能:向ENC28J60的PHY寄存器写入数据
参 数:
addr:寄存器地址
data:要写入的数据
*/
void ENC28J60_PHY_Write(u8 addr,u32 data)
{
u16 retry=0;
ENC28J60_Write(MIREGADR,addr); //设置PHY寄存器地址
ENC28J60_Write(MIWRL,data); //写入数据
ENC28J60_Write(MIWRH,data>>8);
while((ENC28J60_Read(MISTAT)&MISTAT_BUSY)&&retry<0XFFF)retry++;//等待写入PHY结束
}
/*
函数功能:初始化ENC28J60
参 数:macaddr:MAC地址
返 回 值:
0,初始化成功;
1,初始化失败;
*/
u8 ENC28J60_Init(u8* macaddr)
{
u16 retry=0;
ENC28J60_Reset(); //复位底层引脚接口
ENC28J60_Write_Op(ENC28J60_SOFT_RESET,0,ENC28J60_SOFT_RESET);//软件复位
while(!(ENC28J60_Read(ESTAT)&ESTAT_CLKRDY)&&retry<500)//等待时钟稳定
{
retry++;
DelayMs(1);
};
if(retry>=500)return 1;//ENC28J60初始化失败
// do bank 0 stuff
// initialize receive buffer
// 16-bit transfers,must write low byte first
// set receive buffer start address 设置接收缓冲区地址 8K字节容量
NextPacketPtr=RXSTART_INIT;
// Rx start
//接收缓冲器由一个硬件管理的循环FIFO 缓冲器构成。
//寄存器对ERXSTH:ERXSTL 和ERXNDH:ERXNDL 作
//为指针,定义缓冲器的容量和其在存储器中的位置。
//ERXST和ERXND指向的字节均包含在FIFO缓冲器内。
//当从以太网接口接收数据字节时,这些字节被顺序写入
//接收缓冲器。 但是当写入由ERXND 指向的存储单元
//后,硬件会自动将接收的下一字节写入由ERXST 指向
//的存储单元。 因此接收硬件将不会写入FIFO 以外的单
//元。
//设置接收起始字节
ENC28J60_Write(ERXSTL,RXSTART_INIT&0xFF);
ENC28J60_Write(ERXSTH,RXSTART_INIT>>8);
//ERXWRPTH:ERXWRPTL 寄存器定义硬件向FIFO 中
//的哪个位置写入其接收到的字节。 指针是只读的,在成
//功接收到一个数据包后,硬件会自动更新指针。 指针可
//用于判断FIFO 内剩余空间的大小 8K-1500。
//设置接收读指针字节
ENC28J60_Write(ERXRDPTL,RXSTART_INIT&0xFF);
ENC28J60_Write(ERXRDPTH,RXSTART_INIT>>8);
//设置接收结束字节
ENC28J60_Write(ERXNDL,RXSTOP_INIT&0xFF);
ENC28J60_Write(ERXNDH,RXSTOP_INIT>>8);
//设置发送起始字节
ENC28J60_Write(ETXSTL,TXSTART_INIT&0xFF);
ENC28J60_Write(ETXSTH,TXSTART_INIT>>8);
//设置发送结束字节
ENC28J60_Write(ETXNDL,TXSTOP_INIT&0xFF);
ENC28J60_Write(ETXNDH,TXSTOP_INIT>>8);
// do bank 1 stuff,packet filter:
// For broadcast packets we allow only ARP packtets
// All other packets should be unicast only for our mac (MAADR)
//
// The pattern to match on is therefore
// Type ETH.DST
// ARP BROADCAST
// 06 08 -- ff ff ff ff ff ff -> ip checksum for theses bytes=f7f9
// in binary these poitions are:11 0000 0011 1111
// This is hex 303F->EPMM0=0x3f,EPMM1=0x30
//接收过滤器
//UCEN:单播过滤器使能位
//当ANDOR = 1 时:
//1 = 目标地址与本地MAC 地址不匹配的数据包将被丢弃
//0 = 禁止过滤器
//当ANDOR = 0 时:
//1 = 目标地址与本地MAC 地址匹配的数据包会被接受
//0 = 禁止过滤器
//CRCEN:后过滤器CRC 校验使能位
//1 = 所有CRC 无效的数据包都将被丢弃
//0 = 不考虑CRC 是否有效
//PMEN:格式匹配过滤器使能位
//当ANDOR = 1 时:
//1 = 数据包必须符合格式匹配条件,否则将被丢弃
//0 = 禁止过滤器
//当ANDOR = 0 时:
//1 = 符合格式匹配条件的数据包将被接受
//0 = 禁止过滤器
ENC28J60_Write(ERXFCON,ERXFCON_UCEN|ERXFCON_CRCEN|ERXFCON_PMEN);
ENC28J60_Write(EPMM0,0x3f);
ENC28J60_Write(EPMM1,0x30);
ENC28J60_Write(EPMCSL,0xf9);
ENC28J60_Write(EPMCSH,0xf7);
// do bank 2 stuff
// enable MAC receive
//bit 0 MARXEN:MAC 接收使能位
//1 = 允许MAC 接收数据包
//0 = 禁止数据包接收
//bit 3 TXPAUS:暂停控制帧发送使能位
//1 = 允许MAC 发送暂停控制帧(用于全双工模式下的流量控制)
//0 = 禁止暂停帧发送
//bit 2 RXPAUS:暂停控制帧接收使能位
//1 = 当接收到暂停控制帧时,禁止发送(正常操作)
//0 = 忽略接收到的暂停控制帧
ENC28J60_Write(MACON1,MACON1_MARXEN|MACON1_TXPAUS|MACON1_RXPAUS);
// bring MAC out of reset
//将MACON2 中的MARST 位清零,使MAC 退出复位状态。
ENC28J60_Write(MACON2,0x00);
// enable automatic padding to 60bytes and CRC operations
//bit 7-5 PADCFG2:PACDFG0:自动填充和CRC 配置位
//111 = 用0 填充所有短帧至64 字节长,并追加一个有效的CRC
//110 = 不自动填充短帧
//101 = MAC 自动检测具有8100h 类型字段的VLAN 协议帧,并自动填充到64 字节长。如果不
//是VLAN 帧,则填充至60 字节长。填充后还要追加一个有效的CRC
//100 = 不自动填充短帧
//011 = 用0 填充所有短帧至64 字节长,并追加一个有效的CRC
//010 = 不自动填充短帧
//001 = 用0 填充所有短帧至60 字节长,并追加一个有效的CRC
//000 = 不自动填充短帧
//bit 4 TXCRCEN:发送CRC 使能位
//1 = 不管PADCFG如何,MAC都会在发送帧的末尾追加一个有效的CRC。 如果PADCFG规定要
//追加有效的CRC,则必须将TXCRCEN 置1。
//0 = MAC不会追加CRC。 检查最后4 个字节,如果不是有效的CRC 则报告给发送状态向量。
//bit 0 FULDPX:MAC 全双工使能位
//1 = MAC工作在全双工模式下。 PHCON1.PDPXMD 位必须置1。
//0 = MAC工作在半双工模式下。 PHCON1.PDPXMD 位必须清零。
ENC28J60_Write_Op(ENC28J60_BIT_FIELD_SET,MACON3,MACON3_PADCFG0|MACON3_TXCRCEN|MACON3_FRMLNEN|MACON3_FULDPX);
// set inter-frame gap (non-back-to-back)
//配置非背对背包间间隔寄存器的低字节
//MAIPGL。 大多数应用使用12h 编程该寄存器。
//如果使用半双工模式,应编程非背对背包间间隔
//寄存器的高字节MAIPGH。 大多数应用使用0Ch
//编程该寄存器。
ENC28J60_Write(MAIPGL,0x12);
ENC28J60_Write(MAIPGH,0x0C);
// set inter-frame gap (back-to-back)
//配置背对背包间间隔寄存器MABBIPG。当使用
//全双工模式时,大多数应用使用15h 编程该寄存
//器,而使用半双工模式时则使用12h 进行编程。
ENC28J60_Write(MABBIPG,0x15);
// Set the maximum packet size which the controller will accept
// Do not send packets longer than MAX_FRAMELEN:
// 最大帧长度 1500
ENC28J60_Write(MAMXFLL,MAX_FRAMELEN&0xFF);
ENC28J60_Write(MAMXFLH,MAX_FRAMELEN>>8);
// do bank 3 stuff
// write MAC address
// NOTE: MAC address in ENC28J60 is byte-backward
//设置MAC地址
ENC28J60_Write(MAADR5,macaddr[0]);
ENC28J60_Write(MAADR4,macaddr[1]);
ENC28J60_Write(MAADR3,macaddr[2]);
ENC28J60_Write(MAADR2,macaddr[3]);
ENC28J60_Write(MAADR1,macaddr[4]);
ENC28J60_Write(MAADR0,macaddr[5]);
//配置PHY为全双工 LEDB为拉电流
ENC28J60_PHY_Write(PHCON1,PHCON1_PDPXMD);
// no loopback of transmitted frames 禁止环回
//HDLDIS:PHY 半双工环回禁止位
//当PHCON1.PDPXMD = 1 或PHCON1.PLOOPBK = 1 时:
//此位可被忽略。
//当PHCON1.PDPXMD = 0 且PHCON1.PLOOPBK = 0 时:
//1 = 要发送的数据仅通过双绞线接口发出
//0 = 要发送的数据会环回到MAC 并通过双绞线接口发出
ENC28J60_PHY_Write(PHCON2,PHCON2_HDLDIS);
// switch to bank 0
//ECON1 寄存器
//寄存器3-1 所示为ECON1 寄存器,它用于控制
//ENC28J60 的主要功能。 ECON1 中包含接收使能、发
//送请求、DMA 控制和存储区选择位。
ENC28J60_Set_Bank(ECON1);
// enable interrutps
//EIE: 以太网中断允许寄存器
//bit 7 INTIE: 全局INT 中断允许位
//1 = 允许中断事件驱动INT 引脚
//0 = 禁止所有INT 引脚的活动(引脚始终被驱动为高电平)
//bit 6 PKTIE: 接收数据包待处理中断允许位
//1 = 允许接收数据包待处理中断
//0 = 禁止接收数据包待处理中断
ENC28J60_Write_Op(ENC28J60_BIT_FIELD_SET,EIE,EIE_INTIE|EIE_PKTIE);
// enable packet reception
//bit 2 RXEN:接收使能位
//1 = 通过当前过滤器的数据包将被写入接收缓冲器
//0 = 忽略所有接收的数据包
ENC28J60_Write_Op(ENC28J60_BIT_FIELD_SET,ECON1,ECON1_RXEN);
if(ENC28J60_Read(MAADR5)== macaddr[0])return 0;//初始化成功
else return 1;
}
/*
函数功能:读取EREVID
参 数:
*/
u8 ENC28J60_Get_EREVID(void)
{
//在EREVID 内也存储了版本信息。 EREVID 是一个只读控
//制寄存器,包含一个5 位标识符,用来标识器件特定硅片
//的版本号
return ENC28J60_Read(EREVID);
}
/*
函数功能:通过ENC28J60发送数据包到网络
参 数:
len :数据包大小
packet:数据包
*/
void ENC28J60_Packet_Send(u32 len,u8* packet)
{
//设置发送缓冲区地址写指针入口
ENC28J60_Write(EWRPTL,TXSTART_INIT&0xFF);
ENC28J60_Write(EWRPTH,TXSTART_INIT>>8);
//设置TXND指针,以对应给定的数据包大小
ENC28J60_Write(ETXNDL,(TXSTART_INIT+len)&0xFF);
ENC28J60_Write(ETXNDH,(TXSTART_INIT+len)>>8);
//写每包控制字节(0x00表示使用macon3的设置)
ENC28J60_Write_Op(ENC28J60_WRITE_BUF_MEM,0,0x00);
//复制数据包到发送缓冲区
//printf("len:%drn",len); //监视发送数据长度
ENC28J60_Write_Buf(len,packet);
//发送数据到网络
ENC28J60_Write_Op(ENC28J60_BIT_FIELD_SET,ECON1,ECON1_TXRTS);
//复位发送逻辑的问题。参见Rev. B4 Silicon Errata point 12.
if((ENC28J60_Read(EIR)&EIR_TXERIF))ENC28J60_Write_Op(ENC28J60_BIT_FIELD_CLR,ECON1,ECON1_TXRTS);
}
/*
函数功能:从网络获取一个数据包内容
函数参数:
maxlen:数据包最大允许接收长度
packet:数据包缓存区
返 回 值:收到的数据包长度(字节)
*/
u32 ENC28J60_Packet_Receive(u32 maxlen,u8* packet)
{
u32 rxstat;
u32 len;
if(ENC28J60_Read(EPKTCNT)==0)return 0; //是否收到数据包?
//设置接收缓冲器读指针
ENC28J60_Write(ERDPTL,(NextPacketPtr));
ENC28J60_Write(ERDPTH,(NextPacketPtr)>>8);
// 读下一个包的指针
NextPacketPtr=ENC28J60_Read_Op(ENC28J60_READ_BUF_MEM,0);
NextPacketPtr|=ENC28J60_Read_Op(ENC28J60_READ_BUF_MEM,0)<<8;
//读包的长度
len=ENC28J60_Read_Op(ENC28J60_READ_BUF_MEM,0);
len|=ENC28J60_Read_Op(ENC28J60_READ_BUF_MEM,0)<<8;
len-=4; //去掉CRC计数
//读取接收状态
rxstat=ENC28J60_Read_Op(ENC28J60_READ_BUF_MEM,0);
rxstat|=ENC28J60_Read_Op(ENC28J60_READ_BUF_MEM,0)<<8;
//限制接收长度
if (len>maxlen-1)len=maxlen-1;
//检查CRC和符号错误
// ERXFCON.CRCEN为默认设置,一般我们不需要检查.
if((rxstat&0x80)==0)len=0;//无效
else ENC28J60_Read_Buf(len,packet);//从接收缓冲器中复制数据包
//RX读指针移动到下一个接收到的数据包的开始位置
//并释放我们刚才读出过的内存
ENC28J60_Write(ERXRDPTL,(NextPacketPtr));
ENC28J60_Write(ERXRDPTH,(NextPacketPtr)>>8);
//递减数据包计数器标志我们已经得到了这个包
ENC28J60_Write_Op(ENC28J60_BIT_FIELD_SET,ECON2,ECON2_PKTDEC);
return(len);
}
5.3 enc28j60.h
#include "sys.h"
#ifndef __ENC28J60_H
#define __ENC28J60_H
#include "stm32f10x.h"
////////////////////////////////////////////////////////////////////////////////////////////////////////////////
// ENC28J60 Control Registers
// Control register definitions are a combination of address,
// bank number, and Ethernet/MAC/PHY indicator bits.
// - Register address (bits 0-4)
// - Bank number (bits 5-6)
// - MAC/PHY indicator (bit 7)
#define ADDR_MASK 0x1F
#define BANK_MASK 0x60
#define SPRD_MASK 0x80
// All-bank registers
#define EIE 0x1B
#define EIR 0x1C
#define ESTAT 0x1D
#define ECON2 0x1E
#define ECON1 0x1F
// Bank 0 registers
#define ERDPTL (0x00|0x00)
#define ERDPTH (0x01|0x00)
#define EWRPTL (0x02|0x00)
#define EWRPTH (0x03|0x00)
#define ETXSTL (0x04|0x00)
#define ETXSTH (0x05|0x00)
#define ETXNDL (0x06|0x00)
#define ETXNDH (0x07|0x00)
#define ERXSTL (0x08|0x00)
#define ERXSTH (0x09|0x00)
#define ERXNDL (0x0A|0x00)
#define ERXNDH (0x0B|0x00)
//ERXWRPTH:ERXWRPTL 寄存器定义硬件向FIFO 中
//的哪个位置写入其接收到的字节。 指针是只读的,在成
//功接收到一个数据包后,硬件会自动更新指针。 指针可
//用于判断FIFO 内剩余空间的大小。
#define ERXRDPTL (0x0C|0x00)
#define ERXRDPTH (0x0D|0x00)
#define ERXWRPTL (0x0E|0x00)
#define ERXWRPTH (0x0F|0x00)
#define EDMASTL (0x10|0x00)
#define EDMASTH (0x11|0x00)
#define EDMANDL (0x12|0x00)
#define EDMANDH (0x13|0x00)
#define EDMADSTL (0x14|0x00)
#define EDMADSTH (0x15|0x00)
#define EDMACSL (0x16|0x00)
#define EDMACSH (0x17|0x00)
// Bank 1 registers
#define EHT0 (0x00|0x20)
#define EHT1 (0x01|0x20)
#define EHT2 (0x02|0x20)
#define EHT3 (0x03|0x20)
#define EHT4 (0x04|0x20)
#define EHT5 (0x05|0x20)
#define EHT6 (0x06|0x20)
#define EHT7 (0x07|0x20)
#define EPMM0 (0x08|0x20)
#define EPMM1 (0x09|0x20)
#define EPMM2 (0x0A|0x20)
#define EPMM3 (0x0B|0x20)
#define EPMM4 (0x0C|0x20)
#define EPMM5 (0x0D|0x20)
#define EPMM6 (0x0E|0x20)
#define EPMM7 (0x0F|0x20)
#define EPMCSL (0x10|0x20)
#define EPMCSH (0x11|0x20)
#define EPMOL (0x14|0x20)
#define EPMOH (0x15|0x20)
#define EWOLIE (0x16|0x20)
#define EWOLIR (0x17|0x20)
#define ERXFCON (0x18|0x20)
#define EPKTCNT (0x19|0x20)
// Bank 2 registers
#define MACON1 (0x00|0x40|0x80)
#define MACON2 (0x01|0x40|0x80)
#define MACON3 (0x02|0x40|0x80)
#define MACON4 (0x03|0x40|0x80)
#define MABBIPG (0x04|0x40|0x80)
#define MAIPGL (0x06|0x40|0x80)
#define MAIPGH (0x07|0x40|0x80)
#define MACLCON1 (0x08|0x40|0x80)
#define MACLCON2 (0x09|0x40|0x80)
#define MAMXFLL (0x0A|0x40|0x80)
#define MAMXFLH (0x0B|0x40|0x80)
#define MAPHSUP (0x0D|0x40|0x80)
#define MICON (0x11|0x40|0x80)
#define MICMD (0x12|0x40|0x80)
#define MIREGADR (0x14|0x40|0x80)
#define MIWRL (0x16|0x40|0x80)
#define MIWRH (0x17|0x40|0x80)
#define MIRDL (0x18|0x40|0x80)
#define MIRDH (0x19|0x40|0x80)
// Bank 3 registers
#define MAADR1 (0x00|0x60|0x80)
#define MAADR0 (0x01|0x60|0x80)
#define MAADR3 (0x02|0x60|0x80)
#define MAADR2 (0x03|0x60|0x80)
#define MAADR5 (0x04|0x60|0x80)
#define MAADR4 (0x05|0x60|0x80)
#define EBSTSD (0x06|0x60)
#define EBSTCON (0x07|0x60)
#define EBSTCSL (0x08|0x60)
#define EBSTCSH (0x09|0x60)
#define MISTAT (0x0A|0x60|0x80)
#define EREVID (0x12|0x60)
#define ECOCON (0x15|0x60)
#define EFLOCON (0x17|0x60)
#define EPAUSL (0x18|0x60)
#define EPAUSH (0x19|0x60)
// PHY registers
#define PHCON1 0x00
#define PHSTAT1 0x01
#define PHHID1 0x02
#define PHHID2 0x03
#define PHCON2 0x10
#define PHSTAT2 0x11
#define PHIE 0x12
#define PHIR 0x13
#define PHLCON 0x14
// ENC28J60 ERXFCON Register Bit Definitions
#define ERXFCON_UCEN 0x80
#define ERXFCON_ANDOR 0x40
#define ERXFCON_CRCEN 0x20
#define ERXFCON_PMEN 0x10
#define ERXFCON_MPEN 0x08
#define ERXFCON_HTEN 0x04
#define ERXFCON_MCEN 0x02
#define ERXFCON_BCEN 0x01
// ENC28J60 EIE Register Bit Definitions
#define EIE_INTIE 0x80
#define EIE_PKTIE 0x40
#define EIE_DMAIE 0x20
#define EIE_LINKIE 0x10
#define EIE_TXIE 0x08
#define EIE_WOLIE 0x04
#define EIE_TXERIE 0x02
#define EIE_RXERIE 0x01
// ENC28J60 EIR Register Bit Definitions
#define EIR_PKTIF 0x40
#define EIR_DMAIF 0x20
#define EIR_LINKIF 0x10
#define EIR_TXIF 0x08
#define EIR_WOLIF 0x04
#define EIR_TXERIF 0x02
#define EIR_RXERIF 0x01
// ENC28J60 ESTAT Register Bit Definitions
#define ESTAT_INT 0x80
#define ESTAT_LATECOL 0x10
#define ESTAT_RXBUSY 0x04
#define ESTAT_TXABRT 0x02
#define ESTAT_CLKRDY 0x01
// ENC28J60 ECON2 Register Bit Definitions
#define ECON2_AUTOINC 0x80
#define ECON2_PKTDEC 0x40
#define ECON2_PWRSV 0x20
#define ECON2_VRPS 0x08
// ENC28J60 ECON1 Register Bit Definitions
#define ECON1_TXRST 0x80
#define ECON1_RXRST 0x40
#define ECON1_DMAST 0x20
#define ECON1_CSUMEN 0x10
#define ECON1_TXRTS 0x08
#define ECON1_RXEN 0x04
#define ECON1_BSEL1 0x02
#define ECON1_BSEL0 0x01
// ENC28J60 MACON1 Register Bit Definitions
#define MACON1_LOOPBK 0x10
#define MACON1_TXPAUS 0x08
#define MACON1_RXPAUS 0x04
#define MACON1_PASSALL 0x02
#define MACON1_MARXEN 0x01
// ENC28J60 MACON2 Register Bit Definitions
#define MACON2_MARST 0x80
#define MACON2_RNDRST 0x40
#define MACON2_MARXRST 0x08
#define MACON2_RFUNRST 0x04
#define MACON2_MATXRST 0x02
#define MACON2_TFUNRST 0x01
// ENC28J60 MACON3 Register Bit Definitions
#define MACON3_PADCFG2 0x80
#define MACON3_PADCFG1 0x40
#define MACON3_PADCFG0 0x20
#define MACON3_TXCRCEN 0x10
#define MACON3_PHDRLEN 0x08
#define MACON3_HFRMLEN 0x04
#define MACON3_FRMLNEN 0x02
#define MACON3_FULDPX 0x01
// ENC28J60 MICMD Register Bit Definitions
#define MICMD_MIISCAN 0x02
#define MICMD_MIIRD 0x01
// ENC28J60 MISTAT Register Bit Definitions
#define MISTAT_NVALID 0x04
#define MISTAT_SCAN 0x02
#define MISTAT_BUSY 0x01
// ENC28J60 PHY PHCON1 Register Bit Definitions
#define PHCON1_PRST 0x8000
#define PHCON1_PLOOPBK 0x4000
#define PHCON1_PPWRSV 0x0800
#define PHCON1_PDPXMD 0x0100
// ENC28J60 PHY PHSTAT1 Register Bit Definitions
#define PHSTAT1_PFDPX 0x1000
#define PHSTAT1_PHDPX 0x0800
#define PHSTAT1_LLSTAT 0x0004
#define PHSTAT1_JBSTAT 0x0002
// ENC28J60 PHY PHCON2 Register Bit Definitions
#define PHCON2_FRCLINK 0x4000
#define PHCON2_TXDIS 0x2000
#define PHCON2_JABBER 0x0400
#define PHCON2_HDLDIS 0x0100
// ENC28J60 Packet Control Byte Bit Definitions
#define PKTCTRL_PHUGEEN 0x08
#define PKTCTRL_PPADEN 0x04
#define PKTCTRL_PCRCEN 0x02
#define PKTCTRL_POVERRIDE 0x01
// SPI operation codes
#define ENC28J60_READ_CTRL_REG 0x00
#define ENC28J60_READ_BUF_MEM 0x3A
#define ENC28J60_WRITE_CTRL_REG 0x40
#define ENC28J60_WRITE_BUF_MEM 0x7A
#define ENC28J60_BIT_FIELD_SET 0x80
#define ENC28J60_BIT_FIELD_CLR 0xA0
#define ENC28J60_SOFT_RESET 0xFF
// The RXSTART_INIT should be zero. See Rev. B4 Silicon Errata
// buffer boundaries applied to internal 8K ram
// the entire available packet buffer space is allocated
//
// start with recbuf at 0/
#define RXSTART_INIT 0x0
// receive buffer end
#define RXSTOP_INIT (0x1FFF-1518-1)
// start TX buffer at 0x1FFF-0x0600, pace for one full ethernet frame (0~1518 bytes)
#define TXSTART_INIT (0x1FFF-1518)
// stp TX buffer at end of mem
#define TXSTOP_INIT 0x1FFF
// max frame length which the conroller will accept:
#define MAX_FRAMELEN 1518 // (note: maximum ethernet frame length would be 1518)
////////////////////////////////////////////////////////////////////////////////////////////////////////////////
void ENC28J60_Reset(void);
u8 ENC28J60_Read_Op(u8 op,u8 addr);
void ENC28J60_Write_Op(u8 op,u8 addr,u8 data);
void ENC28J60_Read_Buf(u32 len,u8* data);
void ENC28J60_Write_Buf(u32 len,u8* data);
void ENC28J60_Set_Bank(u8 bank);
u8 ENC28J60_Read(u8 addr);
void ENC28J60_Write(u8 addr,u8 data);
void ENC28J60_PHY_Write(u8 addr,u32 data);
u8 ENC28J60_Init(u8* macaddr);
u8 ENC28J60_Get_EREVID(void);
void ENC28J60_Packet_Send(u32 len,u8* packet);
u32 ENC28J60_Packet_Receive(u32 maxlen,u8* packet);
#endif
5.4 httpd-fs.c
/*
* Copyright (c) 2001, Swedish Institute of Computer Science.
* All rights reserved.
*
* Redistribution and use in source and binary forms, with or without
* modification, are permitted provided that the following conditions
* are met:
* 1. Redistributions of source code must retain the above copyright
* notice, this list of conditions and the following disclaimer.
* 2. Redistributions in binary form must reproduce the above copyright
* notice, this list of conditions and the following disclaimer in the
* documentation and/or other materials provided with the distribution.
* 3. Neither the name of the Institute nor the names of its contributors
* may be used to endorse or promote products derived from this software
* without specific prior written permission.
*
* THIS SOFTWARE IS PROVIDED BY THE INSTITUTE AND CONTRIBUTORS ``AS IS'' AND
* ANY EXPRESS OR IMPLIED WARRANTIES, INCLUDING, BUT NOT LIMITED TO, THE
* IMPLIED WARRANTIES OF MERCHANTABILITY AND FITNESS FOR A PARTICULAR PURPOSE
* ARE DISCLAIMED. IN NO EVENT SHALL THE INSTITUTE OR CONTRIBUTORS BE LIABLE
* FOR ANY DIRECT, INDIRECT, INCIDENTAL, SPECIAL, EXEMPLARY, OR CONSEQUENTIAL
* DAMAGES (INCLUDING, BUT NOT LIMITED TO, PROCUREMENT OF SUBSTITUTE GOODS
* OR SERVICES; LOSS OF USE, DATA, OR PROFITS; OR BUSINESS INTERRUPTION)
* HOWEVER CAUSED AND ON ANY THEORY OF LIABILITY, WHETHER IN CONTRACT, STRICT
* LIABILITY, OR TORT (INCLUDING NEGLIGENCE OR OTHERWISE) ARISING IN ANY WAY
* OUT OF THE USE OF THIS SOFTWARE, EVEN IF ADVISED OF THE POSSIBILITY OF
* SUCH DAMAGE.
*
* This file is part of the lwIP TCP/IP stack.
*
* Author: Adam Dunkels
*
* $Id: httpd-fs.c,v 1.1 2006/06/07 09:13:08 adam Exp $
*/
#include "httpd.h"
#include "httpd-fs.h"
#include "httpd-fsdata.h"
#ifndef NULL
#define NULL 0
#endif /* NULL */
#include "httpd-fsdata.c"
#if HTTPD_FS_STATISTICS
static u16_t count[HTTPD_FS_NUMFILES];
#endif /* HTTPD_FS_STATISTICS */
/*-----------------------------------------------------------------------------------*/
static u8_t
httpd_fs_strcmp(const char *str1, const char *str2)
{
u8_t i;
i = 0;
loop:
if(str2[i] == 0 ||
str1[i] == 'r' ||
str1[i] == 'n') {
return 0;
}
if(str1[i] != str2[i]) {
return 1;
}
++i;
goto loop;
}
#include
#include
#include "led.h"
#include "ds18b20.h"
#include "stm32f10x.h"
#include "rtc.h"
extern const unsigned char web_data[];
extern const char led1_on[];
extern const char led1_off[];
char ds18b20_temp[100]; //存放DS18B20温度信息
u16 ds18b20_T;
u16 ds18b20_intT,ds18b20_decT; //温度值的整数和小数部分
/*-----------------------------------------------------------------------------------*/
int
httpd_fs_open(const char *name, struct httpd_fs_file *file)
{
//第一次的默认页面
if(strstr(name,"/index.html"))
{
file->data=(char*)web_data;
file->len = sizeof(web_data);
return 1;
}
else if(strstr(name,"/404.html"))
{
file->data=(char*)data_404_html;
file->len = sizeof(data_404_html);
return 0;
}
else if(strstr(name,"/test?data=off1"))
{
file->data=(char*)led1_on;
file->len = strlen(led1_on);
LED1=1;
return 1;
}
else if(strstr(name,"/test?data=on1"))
{
file->data=(char*)led1_off;
file->len = strlen(led1_off);
LED1=0;
return 1;
}
else if(strstr(name,"/test?data=off2"))
{
file->data=(char*)led1_on;
file->len = strlen(led1_on);
LED2=1;
return 1;
}
else if(strstr(name,"/test?data=on2"))
{
file->data=(char*)led1_off;
file->len = strlen(led1_off);
LED2=0;
return 1;
}
else if(strstr(name,"/test?data=off3"))
{
file->data=(char*)led1_on;
file->len = strlen(led1_on);
LED3=1;
return 1;
}
else if(strstr(name,"/test?data=on3"))
{
file->data=(char*)led1_off;
file->len = strlen(led1_off);
LED3=0;
return 1;
}
else if(strstr(name,"/test?data=off4"))
{
file->data=(char*)led1_on;
file->len = strlen(led1_on);
LED4=1;
return 1;
}
else if(strstr(name,"/test?data=on4"))
{
file->data=(char*)led1_off;
file->len = strlen(led1_off);
LED4=0;
return 1;
}
else if(strstr(name,"/test?data=off5"))
{
file->data=(char*)led1_on;
file->len = strlen(led1_on);
BEEP=0;
return 1;
}
else if(strstr(name,"/test?data=on5"))
{
file->data=(char*)led1_off;
file->len = strlen(led1_off);
BEEP=1;
return 1;
}
else if(strstr(name,"/test?data=temp"))
{
/*读取温度信息*/
ds18b20_T=DS18B20_Get_Temp();
ds18b20_intT = ds18b20_T >> 4; //分离出温度值整数部分
ds18b20_decT = ds18b20_T & 0xF; //分离出温度值小数部分
//printf("%d-%d-%d %d:%d:%drn",rtc_time.year,rtc_time.mon,rtc_time.day,rtc_time.hour,rtc_time.min,rtc_time.sec);
sprintf(ds18b20_temp,"%d.%d&%d-%d-%d %d:%d:%d",ds18b20_intT,ds18b20_decT,rtc_time.year,rtc_time.mon,rtc_time.day,rtc_time.hour,rtc_time.min,rtc_time.sec);
file->data=(char*)ds18b20_temp;
file->len = strlen(ds18b20_temp);
return 1;
}
return 0;
}
/*-----------------------------------------------------------------------------------*/
void
httpd_fs_init(void)
{
#if HTTPD_FS_STATISTICS
u16_t i;
for(i = 0; i < HTTPD_FS_NUMFILES; i++) {
count[i] = 0;
}
#endif /* HTTPD_FS_STATISTICS */
}
/*-----------------------------------------------------------------------------------*/
#if HTTPD_FS_STATISTICS
u16_t httpd_fs_count
(char *name)
{
struct httpd_fsdata_file_noconst *f;
u16_t i;
i = 0;
for(f = (struct httpd_fsdata_file_noconst *)HTTPD_FS_ROOT;
f != NULL;
f = (struct httpd_fsdata_file_noconst *)f->next) {
if(httpd_fs_strcmp(name, f->name) == 0) {
return count[i];
}
++i;
}
return 0;
}
#endif /* HTTPD_FS_STATISTICS */
/*-----------------------------------------------------------------------------------*/
@sics.se>
审核编辑:汤梓红
-
服务器
+关注
关注
13文章
10094浏览量
90869 -
STM32
+关注
关注
2305文章
11120浏览量
371093 -
TCP
+关注
关注
8文章
1417浏览量
83005
发布评论请先 登录
at_device(8266)不支持web服务器吗?
如何使用 CyCloneTCP 和 FreeRTOS 在 NuMaker IoT 板上构建 Web 服务器?
【EASY EAI Orin Nano开发板试用体验】使用stream推流代码和WEB服务器代码实现在客户端网页上查看摄像头图像

如何配置Linux防火墙和Web服务器





服务器如何处理 HTTP 请求
华为云 Flexus 云服务器 X 实例之 openEuler 系统下部署 Web 应用服务器 OpenResty
Tomcat开放源代码的Web应用服务器






 工商网监
工商网监
评论