 揭秘RTOS任务入口函数执行完之后去哪里了
揭秘RTOS任务入口函数执行完之后去哪里了

1. 说明
在工作过程中,我发现在实际使用RTOS完成项目时,理解这些知识仅能达到会用RTOS的水平,要想用好RTOS,还需要了解一些比较细节的机制,否则容易掉坑进去,花大量时间定位问题。
本文结合TencentOS-Tiny实时操作系统给大家讲述一下相关内容。
2. 任务的通常写法
遵循“不使用就让出”的原则,任务通常有两种写法。
① 「阻塞等待」某个事件处理,等待到之后处理:
voidtask1_entry(void*arg)
{
//init...
while(1){
//1.waitsomekernelobject...
//eg.tos_sem_pend,tos_mutex_pend,tos_event_pend.
//2.waitsuccess,handle!
}
}
这种写法中,在没有事件发生的时候,任务会因为等待某个内核对象而被挂起,让出CPU不参与调度。
② 定时执行
voidtask1_entry(void*arg)
{
//init...
while(1){
//1.dosomething...
//2.sleep!
//eg.tos_task_delay,tos_sleep_ms.
}
}
这种写法中,任务在干完活之后,会主动进入睡眠状态,让出CPU不参与调度。
3. 一次性任务
上面两种写法的共性是都有主循环,不需要考虑任务入口函数退出的情况,但在一些场景中任务只需要执行一次即可:
voidtask1_entry(void*arg)
{
//init...
//dosomething...
//exit?
}
「这个时候就要思考一个问题:任务入口函数执行完毕之后去了哪里?」
4. 寻找答案
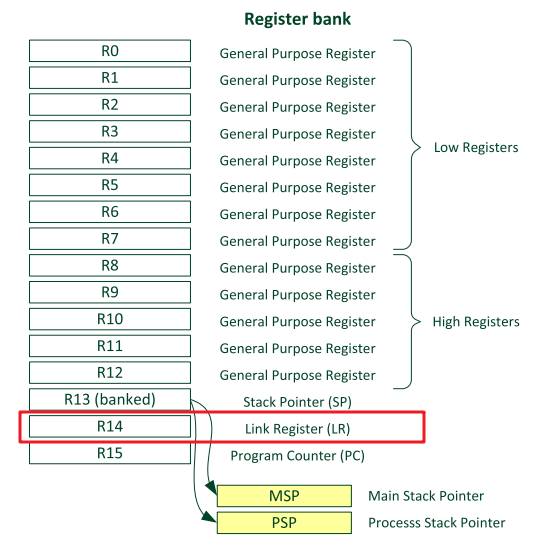
首先,「任务入口函数本质上是一个函数」,跳转函数的指令是BL,CPU在执行该指令跳转到某个函数执行时,会将当前PC地址作为函数返回地址、加载到LR寄存器中、保证函数执行完可以返回到这儿继续执行,再将函数地址加载到PC寄存器、程序接着执行就到了函数中。
那么,任务入口函数没有被别的函数主动调用,是如何被拉起来执行的呢?
任务切换分为两步:保存上文、切换下文。切换下文就是指将保存在任务栈中的CPU寄存器组的值、加载到CPU中。
「所以,当任务栈中初始保存的CPU寄存器组的值中、PC寄存器值为该任务的任务入口函数地址时,切换下文加载之后,由于PC指向任务入口函数,所以CPU接着运行就到了任务入口函数中,也就是该任务在运行。」
同样的道理,「任务栈中初始保存的CPU寄存器组的值中、LR寄存器的值决定了、任务入口函数退出时候返回到哪里。」
由于不同CPU架构的CPU寄存器组不同,所以初始化任务栈的代码与架构强相关,在arch目录下都有不同架构对应的实现。
这里我们以ARM Cortex-M4为例(Arm-v7m)看看代码如何实现:
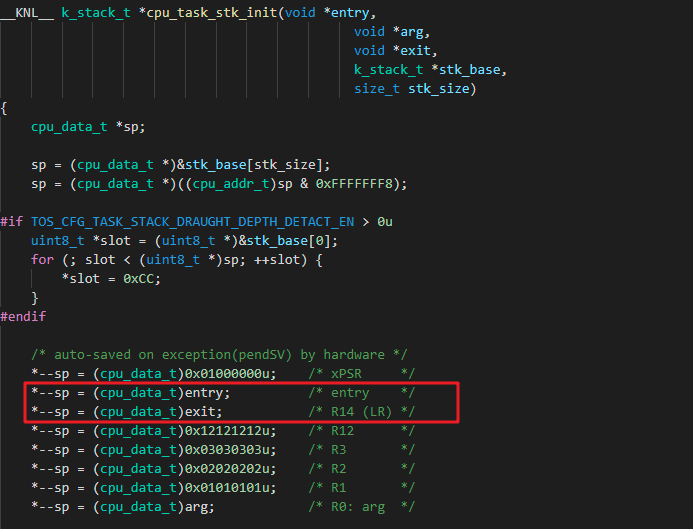
从代码里可以看到,TencentOS-Tiny默认退出函数为exit参数指定的值,接下来我们看看退出函数~
5. 任务退出函数
在创建任务的API tos_task_create 中,初始化任务栈的过程中会指定退出函数为 task_exit:
task->sp=cpu_task_stk_init((void*)entry,arg,(void*)task_exit,stk_base,stk_size);
task_exit 函数主要完成销毁自身的工作,具体实现如下:
__STATIC__voidtask_exit(void)
{
tos_task_destroy(K_NULL);
}
该销毁函数传入的参数为NULL表示销毁自身,如果是静态任务则按以下步骤销毁(动态任务销毁值得用一篇文章去讲述):
- 将任务从就绪列表移除
- 将任务从等待列表移除
- 将任务从统计列表移除
- 任务状态置为K_TASK_STATE_DELETED
6. 总结
本文讲述了任务的两种常规写法,以及任务函数执行完毕之后去了哪里?
当任务函数执行完毕退出时,会执行到哪里由任务栈初始化时LR寄存器的值决定,RTOS内核都会提供一个默认退出函数,TencentOS-Tiny提供的任务退出函数中,会自动销毁任务自身。
所以在编写一次性任务时,就不需要主动调用销毁API销毁自身啦~
-
寄存器
+关注
关注
31文章
5619浏览量
130406 -
API
+关注
关注
2文章
2474浏览量
67005 -
函数
+关注
关注
3文章
4421浏览量
67832 -
RTOS
+关注
关注
25文章
869浏览量
123210
原文标题:RTOS 任务入口函数执行完之后去哪里了?
文章出处:【微信号:strongerHuang,微信公众号:strongerHuang】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
【瑞萨FPB-RA6E2试用】【瑞萨FPB-RA6E2】RTOS(Real-Time Operating System,实时操作系统)《线程》个人理解及项目实现
如何在Zephyr RTOS中实现延时和计时函数

使用RTOS时需要注意的几点内容分享
选择RTOS的要点
RTOS Crash 问题全维度分析与解决指南
RTOS 必学概念:任务、信号量、队列一次搞懂

Task任务:LuatOS实现“任务级并发”的核心引擎
揭秘LuatOS Task:多任务管理的“智能中枢”
【RA4L1-SENSOR】05 按键实现RTOS任务切换
揭秘LuatOS:实时操作系统RTOS核心库的关键技术剖析!



评论