 简述摆臂涂胶桶STEP控制的一些感悟
简述摆臂涂胶桶STEP控制的一些感悟

首先规划会给你关于涂胶控制的两套MAKRO设置,一种是正常的控制摆臂胶桶的MAKRO程序,第二种是利用MAKRO去激活STEP来执行胶桶摆臂。第二种的控制更复杂,更具安全性,当你只执行MAKRO程序时,是不能激活STEP的。
下面简单介绍一下,涂胶STEP.
关键点:
A2113 开启先导阀
A2116 胶桶摆回
A2118 抱闸释放
A2116胶桶摆回
A2117保持释放到最终位置(泄压)
1.SPSMAKRO185摆臂伸出接胶,当执行完STEP的内容后,必须要用SPSMAKRO187关闭F355
;FOLD 50: SPSMAKRO185 = !E2115 & (E1534 + E163) & !E15 ----控制摆臂伸出;%{SE}%MKUKATPVW %CVW_SPS %VMAKRO %P 2:SPSMAKRO185 = !E2115 & (E1534 +E163) & !E15,3:MAKRO
;ENDFOLD
;FOLD 51: WARTE BIS !E163 & !E1534 + E2115 + E15 + F355 -等待摆臂伸出到位 ;%{SE}%MKUKATPVW %CVW_SPS %VWBOASG %P 2:WARTEBIS !E163 & !E1534 + E2115 + E15 + F355,3:WBOASG
;ENDFOLD ;ENDFOLD
;FOLD 53: WARTE ( EIN ) ZEIT 2 [1/10Sek] ;%{SE}%MKUKATPVW %CVW_SPS %VWTASG %P 2:WARTE ( EIN ) ZEIT 2[1/10Sek],3:WTASG
;ENDFOLD
;FOLD 54: SPSMAKRO187 = F355 初始化摆臂控制信号;%{SE}%MKUKATPVW %CVW_SPS %VMAKRO %P 2:SPSMAKRO187 =F355,3:MAKRO
;ENDFOLD
SPSMAKRO185摆臂撤回胶桶同样需要SPSMAKRO187的存在
;FOLD 59: SPSMAKRO186 = !E2116 -------控制摆臂返回;%{SE}%MKUKATPVW %CVW_SPS %VMAKRO %P 2:SPSMAKRO185 =!E2115 & (E1534 + E163) & !E15,3:MAKRO
;ENDFOLD
;%{SE}%MKUKATPVW %CVW_SPS %VMAKRO %P 2:SPSMAKRO186 =!E2116,3:MAKRO
;FOLD 60: WARTE BIS E2116 ------等待摆臂返回到位;%{SE}%MKUKATPVW%CVW_SPS %VWBOASG %P 2:WARTE BIS E2116,3:WBOASG
;ENDFOLD
;FO;%{SE}%MKUKATPVW%CVW_COM %VCOMMENT %P 2:-- Spueleimer verriegeln - ENDLAGE --,3:VW_COMMENT
;FOLD 62: WARTE ( EIN ) ZEIT 2 [1/10Sek] ;%{SE}%MKUKATPVW %CVW_SPS %VWTASG %P 2:WARTE (EIN ) ZEIT 2 [1/10Sek],3:WTASG
;ENDFOLD
;FOLD 63: SPSMAKRO187 = F355 初始化摆臂控制信号;%{SE}%MKUKATPVW %CVW_SPS %VMAKRO %P 2:SPSMAKRO187 =F355,3:MAKRO
;ENDFOLD
2.分析涂胶STEP过程:
摆臂伸出接胶
;%{E}%MKUKATPVW %CVW_COM %VCOMMENT %P 2:-- InRuhestellung schwenken EIN --, 3: VW_COMMENT
;FOLD F352 = EIN 激活STEP 189步;%{E}%MKUKATPVW %CVW_SPS %VBOASG %P 2:F352 = EIN, 3:BOASG
$FLAG[352] =TRUE
;ENDFOLD
;FOLD F353 = AUS
摆臂撤回胶桶;%{E}%MKUKATPVW %CVW_SPS %VBOASG %P 2:F353 = AUS, 3:BOASG
$FLAG[353] =FALSE
;ENDFOLD
DEFFCTINT MAKRO186(ADV :IN)
;FOLD F352 = AUS ;%{E}%MKUKATPVW%CVW_SPS %VBOASG %P 2:F352 = AUS, 3: BOASG
$FLAG[352] =FALSE
;ENDFOLD
;FOLD F353 = EIN 激活STEP 184步;%{E}%MKUKATPVW %CVW_SPS %VBOASG %P 2:F353 = EIN, 3:BOASG
$FLAG[353] =TRUE
;ENDFOLD
激活STEP的条件:除了MAKRO给入的控制量,还需要F355是非的状态,以及A4039 程序正处于执行状态。程序结束A4039会值0,E13 安全门关闭。
;FOLD Schritt 184 = !F352 & F353 &!F355 & (F523 & !F524 + !F523 & F524) & A4039 & E13
--摆臂撤回胶桶;%{SE}%MKUKATPVW %CVW_SPS %VST_CON %P 2:Schritt 184 =!F352 & F353 & !F355 & (F523 & !F524 + !F523 & F524) &A4039 & E13 , 3: ST_CON
IF NOT$FLAG[352] AND $FLAG[353] AND NOT $FLAG[355] AND ($FLAG[523] AND NOT $FLAG[524]OR NOT $FLAG[523] AND $FLAG[524]) AND $OUT[4039] AND $IN[13] THEN
PREVSTEP = $APP_INT[5]
$APP_INT[5] = 184
ENDIF
;ENDFOLD
;ENDFOLD
;FOLD Schritt 189 = F352 & !F353 &!F355 & (F523 & !F524 + !F523 & F524) & A4039 & E13
---摆臂伸出接胶
;FOLD SCHRITT 184 ----摆臂撤回胶桶;%{SE}%MKUKATPVW%CVW_SPS %VST_CON %P 2:Schritt 184 = !F352 & F353 & !F355 & (F523& !F524 + !F523 & F524) & A4039 & E13 , 3: ST_CON
IF NOT$FLAG[352] AND $FLAG[353] AND NOT $FLAG[355] AND ($FLAG[523] AND NOT $FLAG[524]OR NOT $FLAG[523] AND $FLAG[524]) AND $OUT[4039] AND $IN[13] THEN
PREVSTEP = $APP_INT[5]
$APP_INT[5] = 184
ENDIF
;ENDFOLD
开始-初始化 ;%{P}%MKUKATPVW,%CSTEP,%VST_NR,%P 1:SCHRITT,2:184, 3:KL1 Spueleimer (an Pneum. Schwenkeinheit KL1)
;FOLD ;%{H}
Case 184

;%{SE}%MKUKATPVW %CVW_SPS %VST_CON %P 2:Schritt 188 =!E2115 & E2116 & A4039 , 3:ST_CON
IF NOT$IN[2115] AND $IN[2116] AND $OUT[4039] THEN
PREVSTEP = $APP_INT[5]
$APP_INT[5] = 188
ENDIF
;ENDFOLD
;ENDFOLD
;FOLD SCHRITT 185 –检测先导阀打开;%{P}%MKUKATPVW,%CSTEP,%VST_NR,%P 1:SCHRITT, 2:185,3:KL1 Spueleimer (an Pneum. Schwenkeinheit KL1)
;FOLD ;%{H}
Case 185
;FOLD -- Steuerluft EIN -- ;%{SE}%MKUKATPVW %CVW_COM %VCOMMENT %P 2:--Steuerluft EIN --, 3: VW_COMMENT
;ENDFOLD
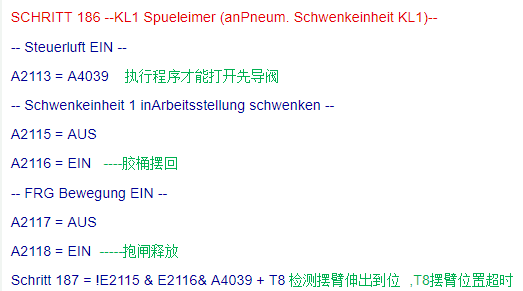
;FOLD A2113 = A4039 执行程序才能打开先导阀;%{SE}%MKUKATPVW %CVW_SPS %VBOASG %P 2:A2113 = A4039,3: BOASG
$OUT[2113]= $OUT[4039]
;ENDFOLD
;FOLD F323 = !E2115 没有伸出到位;%{SE}%MKUKATPVW %CVW_SPS %VBOASG %P 2:F323 = !E2115,3: BOASG
$FLAG[323]= NOT $IN[2115]
;ENDFOLD
;FOLD F329 = F323 基准位控制不在位故障 -F329 总故障;%{SE}%MKUKATPVW %CVW_SPS %VBOASG %P 2:F329 = F323,3: BOASG
$FLAG[329]= $FLAG[323]
;ENDFOLD
;FOLD Schritt 184 = (E26 + E27) & F323& A4039 -有故障,复位返回到184步;%{SE}%MKUKATPVW %CVW_SPS%VST_CON %P 2:Schritt 184 = (E26 + E27) & F323 & A4039 , 3: ST_CON
IF($IN[26] OR $IN[27]) AND $FLAG[323] AND $OUT[4039] THEN
PREVSTEP = $APP_INT[5]
$APP_INT[5] = 184
ENDIF
;ENDFOLD
;FOLD Schritt 186 = (F523 & !F524& E2113 + !F523 & F524 & !E2114) & A4039
E2113先导阀开 F523带先导阀=EIN --F524先导阀常闭—先导阀正常执行下一步;%{SE}%MKUKATPVW %CVW_SPS%VST_CON %P 2:Schritt 186 = (F523 & !F524 & E2113 + !F523 & F524& !E2114) & A4039 , 3: ST_CON
IF($FLAG[523] AND NOT $FLAG[524] AND $IN[2113] OR NOT $FLAG[523] AND $FLAG[524]AND NOT $IN[2114]) AND $OUT[4039] THEN
PREVSTEP = $APP_INT[5]
$APP_INT[5] = 186
ENDIF
;ENDFOLD
;ENDFOLD
;%{SE}%MKUKATPVW %CVW_SPS %VST_CON %P2:Schritt 187 = !E2115 & E2116 & A4039 + T8 , 3: ST_CON
IF NOT$IN[2115] AND $IN[2116] AND $OUT[4039] OR $TIMER_FLAG[8] THEN
PREVSTEP = $APP_INT[5]
$APP_INT[5] = 187
ENDIF
;ENDFOLD
;ENDFOLD
;FOLD SCHRITT 187 --KL1 Spueleimer (anPneum. Schwenkeinheit KL1)-- ;%{P}%MKUKATPVW,%CSTEP,%VST_NR,%P1:SCHRITT, 2:187, 3:KL1 Spueleimer (an Pneum. Schwenkeinheit KL1)
;FOLD ;%{H}
Case 187
;FOLD -- Steuerluft EIN -- ;%{SE}%MKUKATPVW %CVW_COM %VCOMMENT %P 2:--Steuerluft EIN --, 3: VW_COMMENT
;ENDFOLD
;FOLD A2113 = A4039 ;%{SE}%MKUKATPVW %CVW_SPS %VBOASG %P 2:A2113= A4039, 3: BOASG
$OUT[2113]= $OUT[4039]
;ENDFOLD
;FOLD F324 = !E2116 & T8 + F324 -旋转位置故障F324--;%{SE}%MKUKATPVW%CVW_SPS %VBOASG %P 2:F324 = !E2116 & T8 + F324, 3: BOASG
$FLAG[324]= NOT $IN[2116] AND $TIMER_FLAG[8] OR $FLAG[324]
;ENDFOLD
;FOLD -- RSK Sammelstoerung -- ;%{SE}%MKUKATPVW %CVW_COM %VCOMMENT %P 2:--RSK Sammelstoerung --, 3: VW_COMMENT
;ENDFOLD
;FOLD F329 = F324 -F329 总故障;%{SE}%MKUKATPVW %CVW_SPS %VBOASG %P 2:F329 = F324,3: BOASG
$FLAG[329]= $FLAG[324]
;ENDFOLD
;FOLD A2116 = AUS -关闭胶桶摆回;%{SE}%MKUKATPVW%CVW_SPS %VBOASG %P 2:A2116 = AUS, 3: BOASG
$OUT[2116]= FALSE
;ENDFOLD
;FOLD A2118 = AUS -关闭抱闸释放 ;%{SE}%MKUKATPVW%CVW_SPS %VBOASG %P 2:A2118 = AUS, 3: BOASG
$OUT[2118]= FALSE
;ENDFOLD
;FOLD Schritt 184 = F324 & (E26 + E27)& A4039 -有旋转摆臂故障复位后回到184步;%{SE}%MKUKATPVW %CVW_SPS %VST_CON %P 2:Schritt 184 =F324 & (E26 + E27) & A4039 , 3:ST_CON
IF$FLAG[324] AND ($IN[26] OR $IN[27]) AND $OUT[4039] THEN
PREVSTEP = $APP_INT[5]
$APP_INT[5] = 184
ENDIF
;ENDFOLD
;FOLD Schritt 188 = !F324 & (E2118 +F837) & A4039 没有故障继续下行;%{SE}%MKUKATPVW %CVW_SPS %VST_CON %P 2:Schritt 188 = !F324 & (E2118 +F837) & A4039 , 3: ST_CON
IF NOT$FLAG[324] AND ($IN[2118] OR $FLAG[837]) AND $OUT[4039] THEN
PREVSTEP = $APP_INT[5]
$APP_INT[5] = 188
ENDIF
;ENDFOLD
;ENDFOLD
;FOLD SCHRITT 188 --KL1 Spueleimer (anPneum. Schwenkeinheit KL1)-- ;%{P}%MKUKATPVW,%CSTEP,%VST_NR,%P1:SCHRITT, 2:188, 3:KL1 Spueleimer (an Pneum. Schwenkeinheit KL1)
;FOLD ;%{H}
Case 188
;FOLD -- Steuerluft EIN -- ;%{SE}%MKUKATPVW %CVW_COM %VCOMMENT %P 2:--Steuerluft EIN --, 3: VW_COMMENT
;ENDFOLD
;FOLD A2113 = A4039 再次开启先导阀;%{SE}%MKUKATPVW %CVW_SPS %VBOASG %P 2:A2113 = A4039,3: BOASG
$OUT[2113]= $OUT[4039]
;ENDFOLD
;FOLD;%{SE}%MKUKATPVW %CVW_COM %VCOMMENT %P 2:-- RSK Sammelstoerung --, 3:VW_COMMENT
;FOLD F329 = T8 -超时故障;%{SE}%MKUKATPVW %CVW_SPS %VBOASG %P 2:F329 = T8, 3:BOASG
$FLAG[329]= $TIMER_FLAG[8]
;ENDFOLD
;FOLD;%{SE}%MKUKATPVW%CVW_COM %VCOMMENT %P 2:-- FRG in Endlage halten ein --, 3: VW_COMMENT
;FOLD A2117 = EIN A2117保持释放到最终位置(泄压);%{SE}%MKUKATPVW %CVW_SPS %VBOASG %P 2:A2117 = EIN, 3: BOASG
$OUT[2117]= TRUE
;ENDFOLD
;FOLD A161 = AUS ;%{SE}%MKUKATPVW %CVW_SPS %VBOASG %P 2:A161 = AUS, 3: BOASG
$OUT[161]= FALSE
;ENDFOLD
;FOLD t8 ( EIN ) = STOP ;%{SE}%MKUKATPVW %CVW_SPS %VTSTOP %P 2:t8 (EIN ) = STOP, 3: TSTOP
VW(#SET_TIME,TRUE,8,1,0)
;ENDFOLD
;FOLD F355 = !E2115 & E2116 –E2116胶桶返回到位,F355发出控制结束;%{SE}%MKUKATPVW%CVW_SPS %VBOASG %P 2:F355 = !E2115 & E2116, 3: BOASG
$FLAG[355]= NOT $IN[2115] AND $IN[2116]
;ENDFOLD
;FOLD Schritt 1 = !E2117 & (E2118 +F837) & F355 & A4039 -返回第一步-
E2117释放压力存在, E2118释放压力不存在F837暂时没有使用
;FOLD SCHRITT 189 --摆臂伸出接胶-- ;%{P}%MKUKATPVW,%CSTEP,%VST_NR,%P1:SCHRITT, 2:189, 3:KL1 Spueleimer (an Pneum. Schwenkeinheit KL1)
;FOLD ;%{H}
Case 189
;FOLD A2113 = A4039 激活先导阀;%{SE}%MKUKATPVW %CVW_SPS %VBOASG %P 2:A2113 = A4039,3: BOASG
$OUT[2113]= $OUT[4039]
;ENDFOLD
;FOLD F321 = AUS ;%{SE}%MKUKATPVW %CVW_SPS %VBOASG %P 2:F321 = AUS, 3: BOASG
$FLAG[321]= FALSE
;ENDFOLD
;FOLD F323 = AUS ;%{SE}%MKUKATPVW %CVW_SPS %VBOASG %P 2:F323 = AUS, 3: BOASG
$FLAG[323]= FALSE
;ENDFOLD
;FOLD F324 = AUS ;%{SE}%MKUKATPVW %CVW_SPS %VBOASG %P 2:F324 = AUS, 3: BOASG
$FLAG[324]= FALSE
;ENDFOLD
;FOLD F329 = AUS ;%{SE}%MKUKATPVW %CVW_SPS %VBOASG %P 2:F329 = AUS, 3: BOASG
$FLAG[329]= FALSE
;ENDFOLD
;FOLD A161 = EIN 给PLC 提示开始执行进程程序;%{SE}%MKUKATPVW %CVW_SPS %VBOASG %P 2:A161 = EIN, 3:BOASG
$OUT[161]= TRUE
;ENDFOLD
;FOLD A2115 = AUS ;%{SE}%MKUKATPVW %CVW_SPS %VBOASG %P 2:A2115 = AUS, 3: BOASG
$OUT[2115]= FALSE
;ENDFOLD
;FOLD A2116 = AUS ;%{SE}%MKUKATPVW %CVW_SPS %VBOASG %P 2:A2116 = AUS, 3: BOASG
$OUT[2116]= FALSE
;ENDFOLD
;FOLD A2117 = AUS ;%{SE}%MKUKATPVW %CVW_SPS %VBOASG %P 2:A2117 = AUS, 3: BOASG
$OUT[2117]= FALSE
;ENDFOLD
;FOLD A2118 = AUS ;%{SE}%MKUKATPVW %CVW_SPS %VBOASG %P 2:A2118 = AUS, 3: BOASG
$OUT[2118]= FALSE
;ENDFOLD
;FOLD -- Ueberwachungszeit Schwenkeinheit1 schwenken -- ;%{SE}%MKUKATPVW%CVW_COM %VCOMMENT %P 2:-- Ueberwachungszeit Schwenkeinheit 1 schwenken --, 3:VW_COMMENT
;ENDFOLD
;FOLD t8 ( EIN ) = -100[1/10Sek] ;%{SE}%MKUKATPVW %CVW_SPS %VTASG %P 2:t8 (EIN ) = -100[1/10Sek], 3: TASG
VW(#SET_TIME,TRUE,8,0,-100)
;ENDFOLD
;FOLD Schritt 190 = !E2115 &A4039 E2115没有伸出胶桶-下行程序;%{SE}%MKUKATPVW%CVW_SPS %VST_CON %P 2:Schritt 190 = !E2115 & A4039 , 3: ST_CON
IF NOT$IN[2115] AND $OUT[4039] THEN
PREVSTEP = $APP_INT[5]
$APP_INT[5] = 190
ENDIF
;ENDFOLD
;FOLD Schritt 193 = E2115 & !E2116& A4039 -如果已经伸出到位就去第193步-;%{SE}%MKUKATPVW %CVW_SPS %VST_CON %P 2:Schritt 193 =E2115 & !E2116 & A4039 , 3:ST_CON
IF$IN[2115] AND NOT $IN[2116] AND $OUT[4039] THEN
PREVSTEP = $APP_INT[5]
$APP_INT[5] = 193
ENDIF
;ENDFOLD
;ENDFOLD
;FOLD SCHRITT 190 --KL1 Spueleimer (anPneum. Schwenkeinheit KL1)-- ;%{P}%MKUKATPVW,%CSTEP,%VST_NR,%P1:SCHRITT, 2:190, 3:KL1 Spueleimer (an Pneum. Schwenkeinheit KL1)
;FOLD ;%{H}
Case 190
;ENDFOLD
;FOLD -- Steuerluft EIN -- ;%{SE}%MKUKATPVW %CVW_COM %VCOMMENT %P 2:--Steuerluft EIN --, 3: VW_COMMENT
;ENDFOLD
;FOLD A2113 = A4039 激活先导阀;%{SE}%MKUKATPVW %CVW_SPS %VBOASG %P 2:A2113 = A4039,3: BOASG
$OUT[2113]= $OUT[4039]
;ENDFOLD
;FOLD -- RSK Fehlerausgabe Schwenkeinheit1 Arbeit. -- ;%{SE}%MKUKATPVW %CVW_COM%VCOMMENT %P 2:-- RSK Fehlerausgabe Schwenkeinheit 1 Arbeit. --, 3: VW_COMMENT
;ENDFOLD
;FOLD F324 = !E2116 没有在胶桶的返回位报警F324也没在伸出位;%{SE}%MKUKATPVW%CVW_SPS %VBOASG %P 2:F324 = !E2116, 3: BOASG
$FLAG[324]= NOT $IN[2116]
;ENDFOLD
;FOLD -- RSK Sammelstoerung -- ;%{SE}%MKUKATPVW %CVW_COM %VCOMMENT %P 2:--RSK Sammelstoerung --, 3: VW_COMMENT
;ENDFOLD
;FOLD F329 = F324 F329 总故障;%{SE}%MKUKATPVW %CVW_SPS %VBOASG %P 2:F329 = F324,3: BOASG
$FLAG[329]= $FLAG[324]
;ENDFOLD
;FOLD Schritt 189 = (E26 + E27) & F324& A4039 有故障,复位后再返回到189步;%{SE}%MKUKATPVW %CVW_SPS %VST_CON %P 2:Schritt 189 =(E26 + E27) & F324 & A4039 , 3:ST_CON
IF($IN[26] OR $IN[27]) AND $FLAG[324] AND $OUT[4039] THEN
PREVSTEP = $APP_INT[5]
$APP_INT[5] = 189
ENDIF
;ENDFOLD
;FOLD Schritt 191 = (F523 & !F524& E2113 + !F523 & F524 & !E2114) & A4039
E2113先导阀开 F523带先导阀=EIN --F524先导阀常闭—先导阀正常执行下一步;%{SE}%MKUKATPVW %CVW_SPS%VST_CON %P 2:Schritt 191 = (F523 & !F524 & E2113 + !F523 & F524& !E2114) & A4039 , 3: ST_CON
IF($FLAG[523] AND NOT $FLAG[524] AND $IN[2113] OR NOT $FLAG[523] AND $FLAG[524]AND NOT $IN[2114]) AND $OUT[4039] THEN
PREVSTEP = $APP_INT[5]
$APP_INT[5] = 191
ENDIF
;ENDFOLD
;ENDFOLD
;FOLD SCHRITT 191 --KL1 Spueleimer (anPneum. Schwenkeinheit KL1)-- ;%{P}%MKUKATPVW,%CSTEP,%VST_NR,%P1:SCHRITT, 2:191, 3:KL1 Spueleimer (an Pneum. Schwenkeinheit KL1)
;FOLD ;%{H}
Case 191
;FOLD -- Steuerluft EIN -- ;%{SE}%MKUKATPVW %CVW_COM %VCOMMENT %P 2:--Steuerluft EIN --, 3: VW_COMMENT
;ENDFOLD
;FOLD A2113 = A4039激活先导阀;%{SE}%MKUKATPVW %CVW_SPS %VBOASG %P 2:A2113 = A4039,3: BOASG
$OUT[2113]= $OUT[4039]
;ENDFOLD
;FOLD A2115 = EIN 胶桶摆出接胶位置;%{SE}%MKUKATPVW %CVW_SPS %VBOASG %P 2:A2115 = EIN,3: BOASG
$OUT[2115]= TRUE
;ENDFOLD
;FOLD A2116 = AUS ;%{SE}%MKUKATPVW %CVW_SPS %VBOASG %P 2:A2116 = AUS, 3: BOASG
$OUT[2116]= FALSE
;ENDFOLD
;FOLD -- FRG Bewegung EIN -- ;%{SE}%MKUKATPVW %CVW_COM %VCOMMENT %P 2:--FRG Bewegung EIN --, 3: VW_COMMENT
;ENDFOLD
;FOLD A2117 = AUS ;%{SE}%MKUKATPVW %CVW_SPS %VBOASG %P 2:A2117 = AUS, 3: BOASG
$OUT[2117]= FALSE
;ENDFOLD
;FOLD A2118 = EIN -----抱闸开启;%{SE}%MKUKATPVW%CVW_SPS %VBOASG %P 2:A2118 = EIN, 3: BOASG
$OUT[2118]= TRUE
;ENDFOLD
;FOLD Schritt 192 = E2115 & !E2116& A4039 + T8
胶桶摆出到位,循序块下行.T8位置超时;%{SE}%MKUKATPVW %CVW_SPS %VST_CON %P 2:Schritt 192 =E2115 & !E2116 & A4039 + T8 , 3:ST_CON
IF$IN[2115] AND NOT $IN[2116] AND $OUT[4039] OR $TIMER_FLAG[8] THEN
PREVSTEP = $APP_INT[5]
$APP_INT[5] = 192
ENDIF
;ENDFOLD
;ENDFOLD
;FOLD SCHRITT 192 --KL1 Spueleimer (anPneum. Schwenkeinheit KL1)-- ;%{P}%MKUKATPVW,%CSTEP,%VST_NR,%P1:SCHRITT, 2:192, 3:KL1 Spueleimer (an Pneum. Schwenkeinheit KL1)
;FOLD ;%{H}
Case 192
;ENDFOLD
;FOLD -- Steuerluft EIN -- ;%{SE}%MKUKATPVW %CVW_COM %VCOMMENT %P 2:--Steuerluft EIN --, 3: VW_COMMENT
;ENDFOLD
;FOLD A2113 = A4039激活先导阀;%{SE}%MKUKATPVW %CVW_SPS %VBOASG %P 2:A2113 = A4039,3: BOASG
$OUT[2113]= $OUT[4039]
;ENDFOLD
;FOLD F323 = !E2115 & T8 + F323 F323没有撤出到位故障;%{SE}%MKUKATPVW %CVW_SPS %VBOASG %P 2:F323 = !E2115& T8 + F323, 3: BOASG
$FLAG[323]= NOT $IN[2115] AND $TIMER_FLAG[8] OR $FLAG[323]
;ENDFOLD
;FOLD F329 = F323 总故障;%{SE}%MKUKATPVW %CVW_SPS %VBOASG %P 2:F329 = F323,3: BOASG
$FLAG[329]= $FLAG[323]
;ENDFOLD
;FOLD A2115 = AUS ;%{SE}%MKUKATPVW %CVW_SPS %VBOASG %P 2:A2115 = AUS, 3: BOASG
$OUT[2115]= FALSE
;ENDFOLD
;FOLD;%{SE}%MKUKATPVW %CVW_COM %VCOMMENT %P 2:-- FRG Bewegung AUS --, 3:VW_COMMENT
;FOLD A2118 = AUS 关闭抱闸;%{SE}%MKUKATPVW%CVW_SPS %VBOASG %P 2:A2118 = AUS, 3: BOASG
$OUT[2118] = FALSE
;ENDFOLD
;FOLD Schritt 189 = F323 & (E26 + E27)& A4039 -有先导阀故障-复位后返回到189步;%{SE}%MKUKATPVW %CVW_SPS %VST_CON %P 2:Schritt 189 =F323 & (E26 + E27) & A4039 , 3:ST_CON
IF$FLAG[323] AND ($IN[26] OR $IN[27]) AND $OUT[4039] THEN
PREVSTEP = $APP_INT[5]
$APP_INT[5] = 189
ENDIF
;ENDFOLD
;FOLD Schritt 193 = !F323 & (E2118 +F837) & A4039 –没有故障气压释放-就下行;%{SE}%MKUKATPVW%CVW_SPS %VST_CON %P 2:Schritt 193 = !F323 & (E2118 + F837) &A4039 , 3: ST_CON
IF NOT$FLAG[323] AND ($IN[2118] OR $FLAG[837]) AND $OUT[4039] THEN
PREVSTEP = $APP_INT[5]
$APP_INT[5] = 193
ENDIF
;ENDFOLD
;ENDFOLD
;FOLD SCHRITT 193 --KL1 Spueleimer (anPneum. Schwenkeinheit KL1)-- ;%{P}%MKUKATPVW,%CSTEP,%VST_NR,%P1:SCHRITT, 2:193, 3:KL1 Spueleimer (an Pneum. Schwenkeinheit KL1)
;FOLD ;%{H}
Case 193
;FOLD -- Steuerluft EIN -- ;%{SE}%MKUKATPVW %CVW_COM %VCOMMENT %P 2:--Steuerluft EIN --, 3: VW_COMMENT
;ENDFOLD
;FOLD A2113 = A4039 -------释放先导阀;%{SE}%MKUKATPVW%CVW_SPS %VBOASG %P 2:A2113 = A4039, 3: BOASG
$OUT[2113]= $OUT[4039]
;ENDFOLD
;FOLD F323 = AUS ;%{SE}%MKUKATPVW %CVW_SPS %VBOASG %P 2:F323 = AUS, 3: BOASG
$FLAG[323]= FALSE
;ENDFOLD
;FOLD F329 = T8 -----超时总故障;%{SE}%MKUKATPVW%CVW_SPS %VBOASG %P 2:F329 = T8, 3: BOASG
$FLAG[329]= $TIMER_FLAG[8]
;ENDFOLD
;FOLD A2117 = EIN -----A2117保持释放到最终位置(泄压);%{SE}%MKUKATPVW %CVW_SPS %VBOASG %P 2:A2117 = EIN, 3: BOASG
$OUT[2117]= TRUE
;ENDFOLD
;FOLD Schritt 194 = !E2117 & (E2118 +F837) & A4039 –没有故障气压释放-就下行;%{SE}%MKUKATPVW %CVW_SPS%VST_CON %P 2:Schritt 194 = !E2117 & (E2118 + F837) & A4039 , 3: ST_CON
IF NOT$IN[2117] AND ($IN[2118] OR $FLAG[837]) AND $OUT[4039] THEN
PREVSTEP = $APP_INT[5]
$APP_INT[5] = 194
ENDIF
;ENDFOLD
;ENDFOLD
;FOLD SCHRITT 194 --KL1 Spueleimer (anPneum. Schwenkeinheit KL1)-- ;%{P}%MKUKATPVW,%CSTEP,%VST_NR,%P1:SCHRITT, 2:194, 3:KL1 Spueleimer (an Pneum. Schwenkeinheit KL1)
;FOLD ;%{H}
Case 194
;FOLD -- Steuerluft EIN -- ;%{SE}%MKUKATPVW %CVW_COM %VCOMMENT %P 2:--Steuerluft EIN --, 3: VW_COMMENT
;ENDFOLD
;FOLD A2113 = A4039 ---先导阀打开;%{SE}%MKUKATPVW%CVW_SPS %VBOASG %P 2:A2113 = A4039, 3: BOASG
$OUT[2113]= $OUT[4039]
;ENDFOLD
;FOLD -- RSK Sammelstoerung -- ;%{SE}%MKUKATPVW %CVW_COM %VCOMMENT %P 2:--RSK Sammelstoerung --, 3: VW_COMMENT
;ENDFOLD
;FOLD F329 = T8 总故障;%{SE}%MKUKATPVW %CVW_SPS %VBOASG %P 2:F329 = T8, 3:BOASG
$FLAG[329]= $TIMER_FLAG[8]
;ENDFOLD
;FOLD A2117 = AUS 关闭A2117保持释放到最终位置(泄压);%{SE}%MKUKATPVW %CVW_SPS %VBOASG %P 2:A2117 = AUS, 3: BOASG
$OUT[2117]= FALSE
;ENDFOLD
;FOLD A161 = AUS ;%{SE}%MKUKATPVW %CVW_SPS %VBOASG %P 2:A161 = AUS, 3: BOASG
$OUT[161]= FALSE
;ENDFOLD
;FOLD t8 ( EIN ) = STOP ;%{SE}%MKUKATPVW %CVW_SPS %VTSTOP %P 2:t8 (EIN ) = STOP, 3: TSTOP
VW(#SET_TIME,TRUE,8,1,0)
;ENDFOLD
;FOLD F355 = E2115 & !E2116 伸出到位E2115,激活F355标识位用来返回到第1位;%{SE}%MKUKATPVW%CVW_SPS %VBOASG %P 2:F355 = E2115 & !E2116, 3: BOASG
$FLAG[355]= $IN[2115] AND NOT $IN[2116]
;ENDFOLD
;FOLD Schritt 1 =F355 & A4039 ;%{SE}%MKUKATPVW %CVW_SPS %VST_CON %P 2:Schritt1 = F355 & A4039 , 3: ST_CON
IF$FLAG[355] AND $OUT[4039] THEN
PREVSTEP = $APP_INT[5]
$APP_INT[5] = 1
ENDIF
;ENDFOLD
;ENDFOLD
;FOLD ;%{P}%MKUKATPVW,%CSTEP,%VST_NR,%P1:SCHRITT, 2:195, 3:KL2 Spueleimer (an Pneum. Schwenkeinheit KL2);%{SE}%MKUKATPVW%CVW_SPS %VST_CON %P 2:Schritt 1 = !E2117 & (E2118 + F837) & F355 &A4039 , 3: ST_CON
读完SPET后 你会发现里面经没有等 E23和 关闭A23的语句,这说明什么呢? 说明无论是摆臂胶桶,还是焊钳铣削的STEP,你在开安全门的时候都会中断它的执行,产生超时,所以这点在编程时一定要注意!
编辑:jq
-
plc
+关注
关注
5052文章
14806浏览量
488608 -
程序
+关注
关注
117文章
3848浏览量
85472 -
step
+关注
关注
0文章
45浏览量
21266
原文标题:关于摆臂涂胶桶STEP控制的一些感悟
文章出处:【微信号:gh_a8b121171b08,微信公众号:机器人及PLC自动化应用】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
如何使用 powerquad 加速器中的一些功能以及 CMSIS 原始实现中的一些功能?
家用智能垃圾桶控制板方案设计原理以及设计中需要注意的事项
技术资讯 I 一文详解 STEP 文件

疆鸿智能PROFINET转CANopen,网关赋能涂胶“智”动化

爬壁机器人磁铁的一些常见问题

智能垃圾桶红外和TOF高精度感应方案
关于六类网线一些问题的解答
贴片电容精度J±5%的一些详细知识

硬件工程师如何提高电路设计的可靠性?
放大器压摆率详解与应用

蜂鸟E203的浮点指令集F的一些实现细节
舵机原理简述!
压摆率是什么?
压电纳米技术如何辅助涂胶显影设备实践精度突围




评论