 中国科学院微纳生物机器人治疗肿瘤方面取得新突破
中国科学院微纳生物机器人治疗肿瘤方面取得新突破

近日,中国科学院深圳先进技术研究院医药所所长蔡林涛研究员、集成所徐天添副研究员、集成所吴新宇研究员等合作在微纳生物机器人治疗肿瘤方面取得新突破。
微纳生物机器人是微纳尺度的类生命机器人,具有自动化和智能化等机器人属性,能够到达现有医疗器械难以企及的微观区域,有望革新传统医学实现疾病的精准诊疗。但是,如何构建具有自主驱动的微纳生物机器人,采用磁、光、声等外场操纵和内生能源驱动机器人穿越复杂生物屏障,实现疾病的精准治疗,并保障其生物安全性,是当前微纳生物机器人的挑战难题和前沿趋势。
蔡林涛研究员及其团队成员邢婕华、尹婷和郑明彬,在团队前期工作基础上(Advanced Functional Materials,2020, 30, 1910176;ACS nano,2020,14, 11452;Biomaterials,2019,214,119226),选用海洋来源的趋磁细菌(AMB-1)作为模板,利用迈克尔加成反应将纳米光敏剂负载到细菌表面,构建了智能微纳生物机器人(AI microrobot),通过磁/光序贯操控,在小鼠体内实现了磁控导航、肿瘤穿透和光热消融。
研究结果表明,微纳生物机器人在磁场操控下,实现了微米尺度的单一或群体精准迁移控制,通过荧光和磁共振双模成像在体内进行实时追踪。利用微纳生物机器人的磁性和缺氧集成靶向,突破复杂的生理屏障带光敏剂进入到肿瘤内部后,利用远程近红外激光触发产生局部高温,实现了肿瘤的可视化精准治疗。
具有磁/光序贯操控性能的微纳生物机器人,在磁场下实现了微米尺度的单控群控;突破复杂的生理屏障进入到肿瘤后,近红外光触发消融肿瘤。
相关论文《微纳生物机器人磁/光序贯操控靶向治疗肿瘤》(Sequential Magneto-actuated and Optics-triggered Biomicrorobots for Targeted Cancer Therapy)在线发表于材料领域权威刊物《先进功能材料》(Advanced Functional Materials,2020,DOI:10.1002/adfm.202008262,IF=16.836)。论文第一作者是深圳先进院客座硕士生邢婕华、博士后尹婷,通讯作者是深圳先进院客座研究员郑明彬与蔡林涛研究员。
项目获得国家自然科学基金、科技部国际合作、中科院重点部署项目、广东省纳米医药重点实验室、深圳市科技计划等基金的大力支持。
责任编辑:PSY
-
机器人
+关注
关注
214文章
31634浏览量
224498 -
医疗电子
+关注
关注
31文章
1464浏览量
92265 -
生物
+关注
关注
0文章
50浏览量
16088 -
微纳米
+关注
关注
0文章
22浏览量
7718
发布评论请先 登录
中国科学院长春光机所首次亮相SEMICON China 2026
中国科学院西安光机所自研原位传感器 解锁深海移动观测新方式
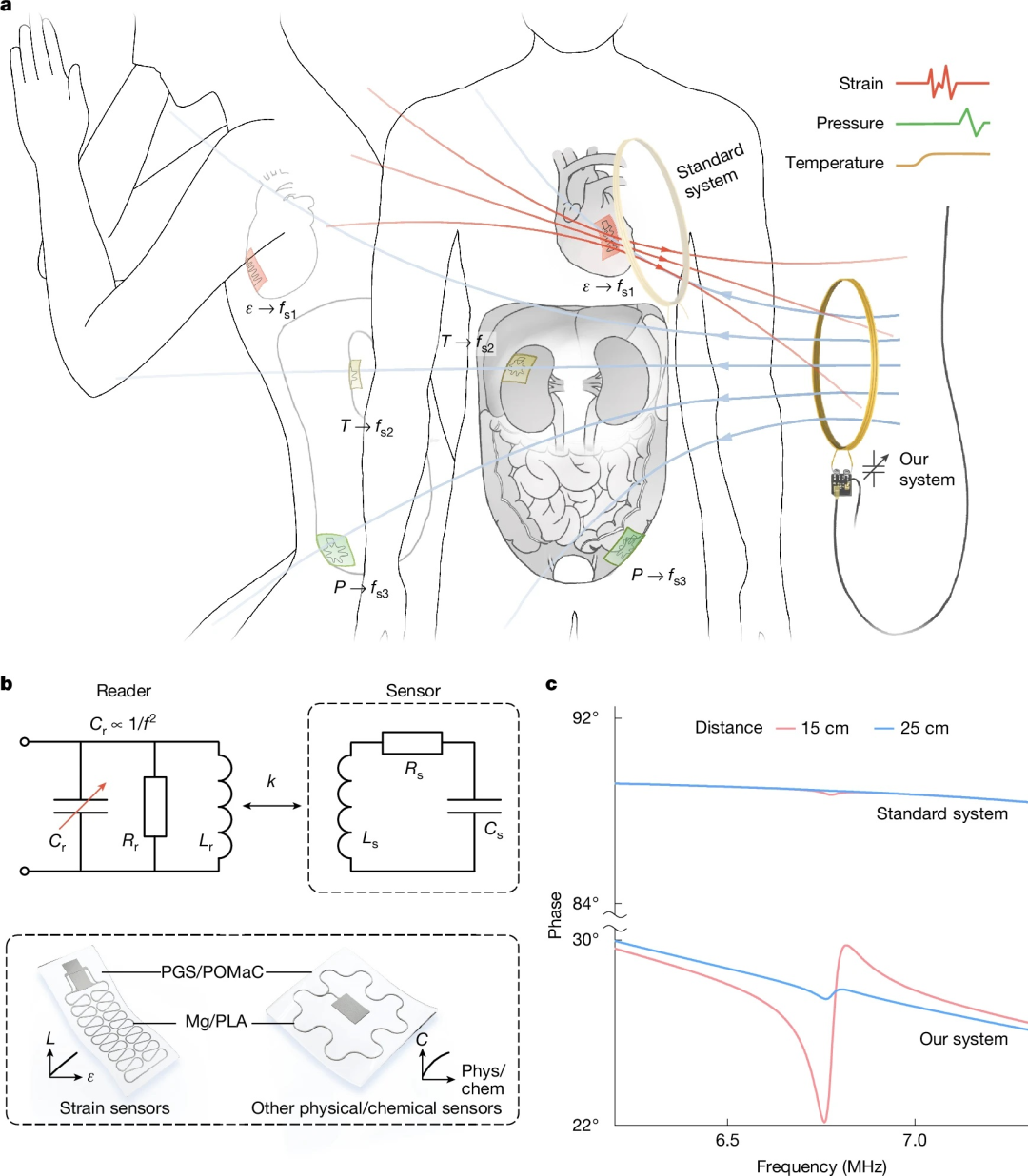
中国科学院与清华大学:在无线传感医疗植入物研究方面取得重要进展
中国科学院专家一行莅临致真精密仪器考察调研
中国科学院自动化研究所一行莅临智行者考察调研
中国科学院:高线性类皮肤柔性传感器研究取得系列进展
润和软件与中国科学院广州生物医药与健康研究院达成战略合作

中国科学院院士王曦,递补为中央委员

中国植入式脑机接口取得新突破
中国科学院自动化研究所携手中科曙光打造高性能工具链解决方案
中国科学院沈阳自动化研究所:研究基于石墨烯/PDMS封装的医用胶带柔性传感器,用于水下机器人运动检测

恭贺 | 晟鹏创始人成会明院士当选欧洲科学院院士!

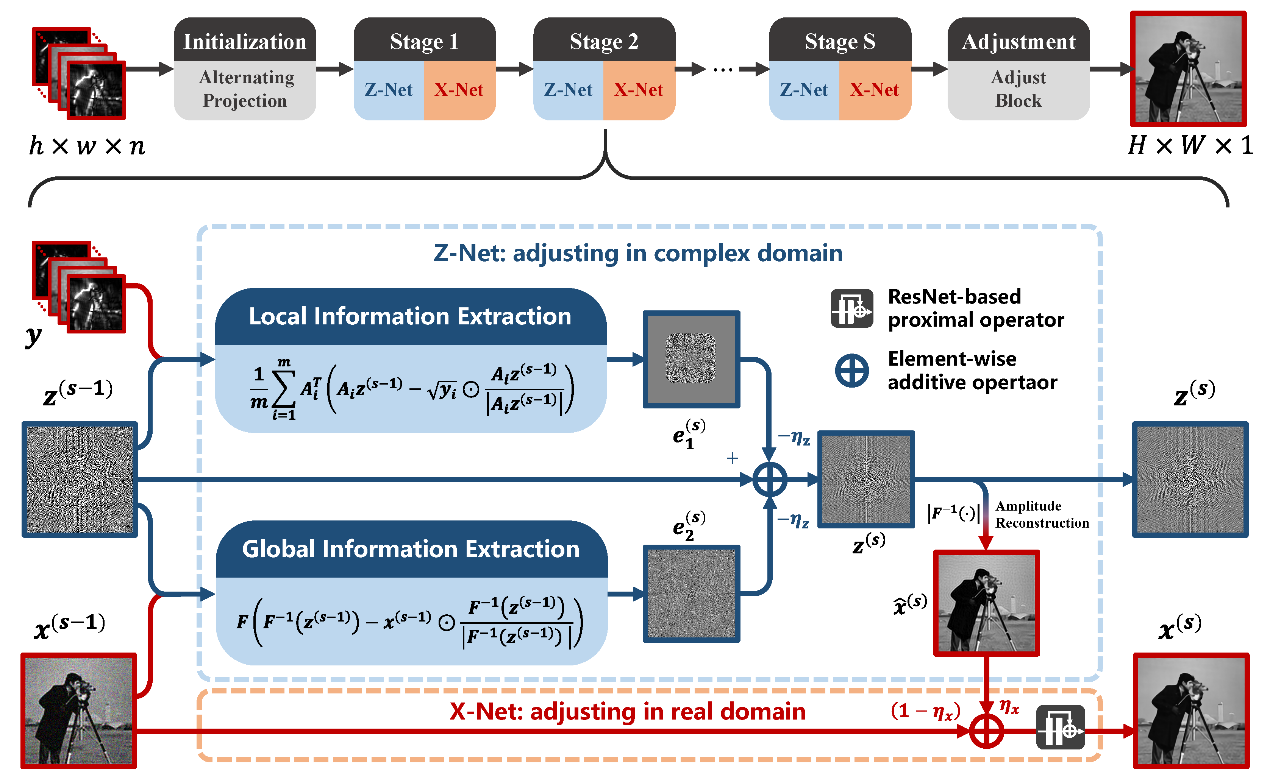
中国科学院西安光机所在计算成像可解释性深度学习重建方法取得进展
澎峰科技亮相第六届中国科学院大学校友创新论坛




评论