 通过Arduino控制步进电机速度和旋转方向
通过Arduino控制步进电机速度和旋转方向

在本篇文章中,我们将学习如何使用摇杆和Arduino开发板控制步进电机的知识。在这里,我们将使用Arduino UNO开发板和PS2游戏杆控制步进电机的速度和旋转方向。
我们使用带有内部驱动器的单极5V DC步进电机28BYJ-48。因此,不需要任何步进电机驱动。相反,我们将使用ULN2003A达林顿双电机驱动器IC。 PS2游戏杆由两个10k欧姆的电位器组成,即一个用于X轴,另一个用于Y轴。它还包括一个按钮。但是我们将仅使用X轴来控制步进电机的运动。
所需的组件
● Arduino UNO开发板
● 28BYJ-48 5V DC步进电机
● ULN2003芯片
● PS2游戏杆
● 5V DC电源
什么是步进电机
步进电动机(stepper motor)是一种无刷直流电动机,它将完整的全周长分为多个相等的步长。然后可以命令电机的位置移动并保持在其中一个步进,而无需任何位置传感器进行反馈(开环控制器),只要在转矩和速度方面仔细选择适合电动机尺寸的电动机即可。
步进电机28-BYJ48的连接方式
步进电动机28-BYJ48是一个具有5引线线圈布置的单极电动机。必须按特定顺序为四个线圈通电。红线连接到+ 5V电压,其余四根线将被拉到接地以触发相应的线圈。我们使用Arduino开发板以特定顺序为这些线圈通电,并使电动机执行所需的步数。
步进电机需要借助驱动器芯片才能进行操作。原因是控制器需要较高的电流才能运行,但是仅步进电机将无法从其I / O引脚提供足够的电流来使电机运行。因此使用ULN2003作为驱动模块,电流被放大了。
连接电路图
要使用摇杆和Arduino控制步进电机,请如下图所示组装电路。
步数计算
在将代码上传到Arduino板上之前需要进行步数计算
在Arduino中,我们将以4步顺序操作电机,因此需要计算步幅角(Stride Angle)。
步幅角= 5.625°
Arduino步骤顺序= 4
所需步骤顺序= 8
步数角度= 5.625 * 2 = 11.25
每转的步数= 360 /步角= 360 / 11.25 =每转32步。
源代码/程序:
#include 《Stepper.h》
#define STEPS 32
// define stepper motor control pins
#define IN1 7
#define IN2 6
#define IN3 5
#define IN4 4
// initialize stepper library
Stepper stepper(STEPS, IN4, IN2, IN3, IN1);
// joystick pot output is connected to Arduino A0
#define joystick A0
void setup()
{
}
void loop()
{
// read analog value from the potentiometer
int val = analogRead(joystick);
// if the joystic is in the middle ===》 stop the motor
if( (val 》 500) && (val 《 523) )
{
digitalWrite(IN1, LOW);
digitalWrite(IN2, LOW);
digitalWrite(IN3, LOW);
digitalWrite(IN4, LOW);
}
else
{
// move the motor in the first direction
while (val 》= 523)
{
// map the speed between 5 and 500 rpm
int speed_ = map(val, 523, 1023, 5, 500);
// set motor speed
stepper.setSpeed(speed_);
// move the motor (1 step)
stepper.step(1);
val = analogRead(joystick);
}
// move the motor in the other direction
while (val 《= 500)
{
// map the speed between 5 and 500 rpm
int speed_ = map(val, 500, 0, 5, 500);
// set motor speed
stepper.setSpeed(speed_);
// move the motor (1 step)
stepper.step(-1);
val = analogRead(joystick);
}
}
}
编辑:hfy
-
驱动器
+关注
关注
54文章
9118浏览量
156543 -
电位器
+关注
关注
14文章
1031浏览量
69489 -
步进电机
+关注
关注
153文章
3272浏览量
152778 -
步进电动机
+关注
关注
0文章
60浏览量
13423
发布评论请先 登录
步进电机的位置控制与速度控制

为什么步进电机的力矩会随转速的升高而下降


【上海晶珩睿莓1开发板试用体验】物联网窗帘——步进电机的网络远程控制
单片机怎么控制步进电机的
同步电机步进运动性能分析
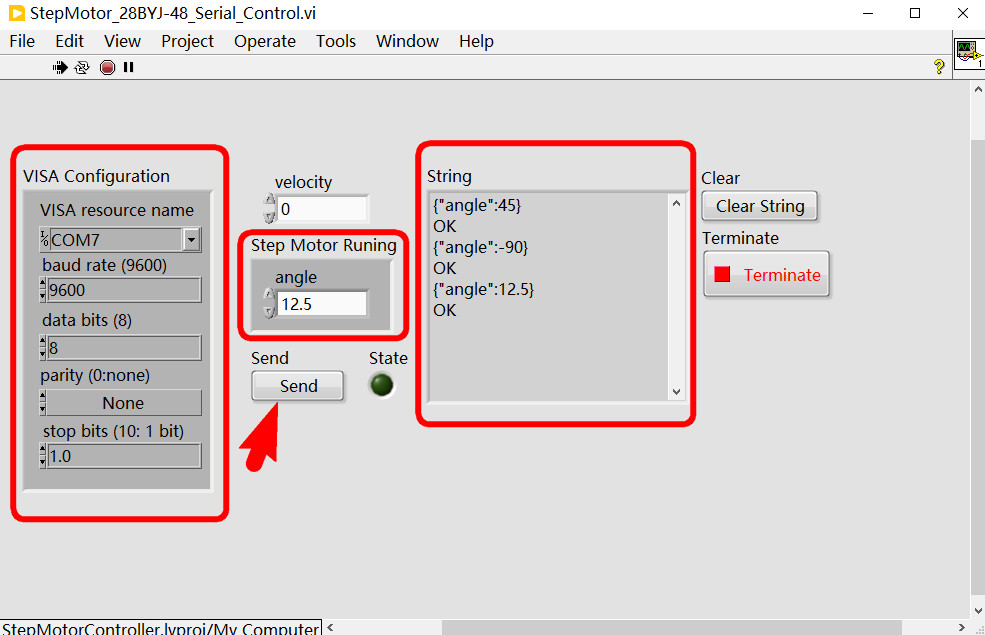
步进电机的 LabVIEW 控制与应用



评论