 一种基于非线性模型预测控制(NMPC)的计算技术
一种基于非线性模型预测控制(NMPC)的计算技术
自主无人飞行器(UAV)在广泛的应用中显示了巨大的潜力,包括自动包裹递送和大范围地理区域的监视。但是,要在现实环境中完成任务,无人机需要能够高效导航并避免周围环境出现障碍。
瑞典吕勒奥工业大学和加利福尼亚理工学院的研究人员最近开发了一种基于非线性模型预测控制(NMPC)的计算技术,该技术可以为无人机提供更好的导航和避障能力。他们使用的NMPC方法发表在IEEE机器人与自动化快报上的一篇论文中,该方法基于OpEn(优化引擎)的结构,OpEn(优化引擎)是贝尔法斯特女王大学Pantelis Sopasakis博士开发的参数优化软件。
进行这项研究的研究人员之一比约恩·林德奎斯特(BjörnLindqvist)对TechXplore表示:“我们的团队此前已经发表了几篇有关无人机自动避障和导航的作品。”“在我们最近的研究中,我们开始使用NMPC扩展避障的概念,以包括对移动或动态障碍的直接考虑。我们的目标是提供技术演示,说明现代智能控制结构如何使无人飞行器成为现实。例如在城市环境中经常使用的环境中,周围环境总是在移动,并且避免碰撞对于确保人员和其他车辆的安全非常重要。”
NMPC是基于优化的方案,可用于解决各种现实问题。该方案可以基于系统的数学模型以及在给定时间作用于系统的一系列控制输入,对系统的未来状态进行预测。
其预测涵盖了多个未来时间步长,这些时间步长合在一起称为“预测范围”。随后,该方案以允许系统最有效地完成一组所需目标的方式(例如,参考跟踪)计算控制输入。 ,避免障碍,保持约束等)。
Lindqvist和他的同事在他们的论文中表明,基于NMPC的模型可以在不断变化的环境(例如城市)中为无人机提供先进的自主导航和避障功能。更具体地说,他们使用NMPC算法来预测无人机周围环境中的障碍物轨迹,同时还使用分类模型来区分不同类型的轨迹并预测障碍物的未来位置。
Lindqvist说:“由于NMPC通过对未来状态进行预测和优化来工作,因此我们也可以根据一些测量结果,通过预测移动/动态障碍物的未来位置来纳入对移动/动态障碍物的直接考虑。”“这种方法提供了一种优雅的解决方案,将控制,局部路径规划和动态避障功能集成在一个控制层中。”
研究人员在许多实验室实验中评估了他们的NMPC方案。值得注意的是,他们的模型可以在无人机被多个移动障碍物包围的各种情况下防止碰撞。
Lindqvist说:“在吕勒奥工业大学的机器人与AI团队中,我们非常重视理论的实验验证。”“在我们最近的工作中,我们展示了NMPC架构如何即使在快速移动的障碍物的情况下也能提供无碰撞的轨迹,而不会违反规定的安全距离。我相信,这种避免障碍物是在城市环境中使用无人机的有趣途径或与人类紧密互动。”
该研究强调了NMPC优化方案在增强无人机导航能力方面的巨大潜力。Lindqvist和他的同事们收集的发现也可以启发其他研究团队将类似的优化技术用于机器人控制和路径规划。最终,这将有助于无人机和其他可在拥挤而动态的环境中安全移动的移动机器人的开发。
-
模型
+关注
关注
1文章
2707浏览量
47704 -
无人机
+关注
关注
224文章
9887浏览量
174827 -
无人飞行器
+关注
关注
0文章
19浏览量
9246
发布评论请先 登录
相关推荐
基于非线性自适应学习控制器的四轴飞行器避障方案
非线性元件可计算电阻吗
LabVIEW进行癌症预测模型研究
线性电阻和非线性电阻的区别
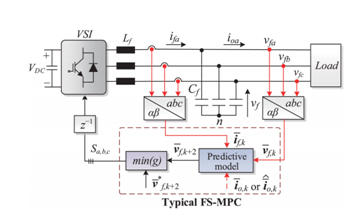
带LC滤波器的电压源逆变器无电流传感器有限集模型预测控制
什么是集成运放的非线性区?集成运放工作在线性区和非线性区有什么区别?
求助,关于运放开环增益非线性的问题
线性负载什么意思?非线性负载是什么意思?
S/H非线性如何?S/H非线性的重要部分如何随输入频率变化?
放大器非线性失真研究装置设计报告
为什么说二极管是一种非线性器件
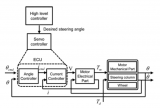
自动驾驶汽车规避转向的模型预测控制
混频器是线性还是非线性?
Matlab/yalmip工具编写自动驾驶模型预测控制(MPC)代码






 工商网监
工商网监
评论