 KUKA机器人为什么KPP故障联不上?
KUKA机器人为什么KPP故障联不上?

1.RDC连不上出现的现象: 通过指示灯的判断是最简单快捷的,如果是坏了可以直接提示RDC的故障,如果灯不亮可直接判断是RDC坏了或者是线没连上.

如果RDC卡连不上,指示是不亮的!
那么KSP或KPP网络断,同样会引起RDC不能读取数据,这是问什么呢?
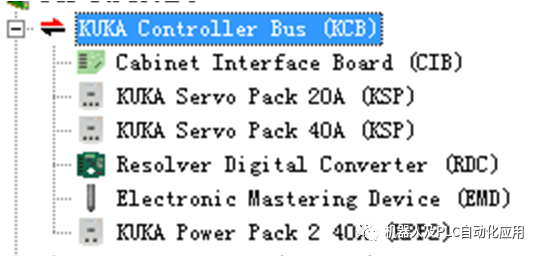
表面上看在KCB总线中KSP与KPP是串行连接的,而他们与RDC和EMT是通过CUU进行并行连接的:

KCB 基于EtherCAT的驱动总线
循环时间 125微秒
FSOE (Fail Safe O verEtherCat)
KPP -库卡配电箱
KSP A4 - 6 库卡伺服包
KSP A1 - 3 库卡伺服包
RDC -旋转变压器数字转换器
EMD -电子控制装置(可耦联式用户)
但是我们在作系统组态时KCB的组态却是串联的!

如果KPP与KSP出现ethercat网络故障之后,在进行断电重启之后,Ethercat网络会开始自诊断,如果出现网络中断,无论是KPP还是KSP的连线出现中断,就不会在与RDC进行连接,并不会读取数据,使得出现RDC数据读取不上来的故障提示!
例:当连接KPP的网线出现中断时,我们有时会习惯性的关机重启,因此这时如果KPP始终没有连接上,Ethercat网络会反馈给机器人系统网络故障,这时RDC将不再连接,不会读取机器人RDC的数据和编号。
因此判断机器人机箱内部网络的故障最佳的方法是查看机器人CCU板上的指示灯!然后在关机重启查看状态!

-
总线
+关注
关注
10文章
3067浏览量
91978 -
RDC
+关注
关注
0文章
33浏览量
9746 -
KUKA机器人
+关注
关注
4文章
144浏览量
10127
原文标题:KUKA机器人为什么KPP故障联不上,断电重启hou报RDC连接连接不上
文章出处:【微信号:gh_a8b121171b08,微信公众号:机器人及PLC自动化应用】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
基于米尔RK3576核心板的国产割草机器人解决方案
基于 BLDC/PWM 的扫地机器人行走电机驱动板电路原理与故障保护
Neway电机方案在机器人技术方面的优势
NVIDIA 携手全球机器人领导者,将物理 AI 带入现实世界

在 VisionFive 2 上实现机器人伺服控制
EtherCAT转PROFINET网关:助力KUKA机器人实现“焊”装自由!
RK3576机器人核心:三屏异显+八路摄像头,重塑机器人交互与感知
小萝卜机器人的故事
自制巡线解迷宫机器人(上)
机器人竞技幕后:磁传感器芯片激活 “精准感知力”
工业机器人的特点
轮式移动机器人电机驱动系统的研究与开发
人形机器人为什么要定制? ——揭秘工业场景的"千面需求"
虹科分享 功夫机器人来了!CMG擂台之上的技术决胜点是什么?



评论