 气伺服焊钳平衡缸故障分析
气伺服焊钳平衡缸故障分析

焊钳结构:---平衡缸的位置
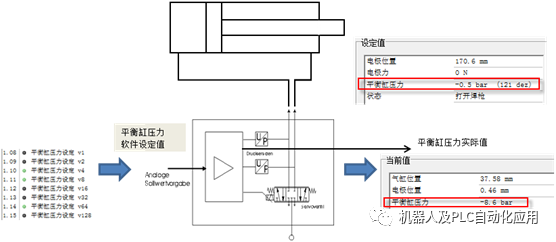
平衡缸控制阀的位置:
MPYD为压差控制阀,可对平衡缸压力在+/-10bar之间调节,由机器人控制给入:
焊钳进行位置模式控制下:
平衡气缸处于缩回位置ΔP < 0
焊接臂顶住螺钉,停止锁死位置,E719
焊钳在力模式控制下:
平衡气缸处于伸出位置 ΔP > 0
焊接臂自由状态,浮动位置.! E719
机器人控制A729-A736:平衡缸压力设定: 采用二进制控制.BIN2
$BIN_OUT[2]={F_BIT 729,LEN 8,PARITY #NONE}
5: bin2 ( EIN ) = 114 在夹紧焊接前会通过二进制给焊钳平衡缸值
6: WARTE BIS !E129 + E26
7: SPSMAKRO80 = EIN 焊接程序
bin2 ( EIN ) = 0-255 / 压力值: -10-à+1010bar
E12平衡缸超时: 原因: 平衡气缸,MPVD平衡缸比例阀,线束.
| 平衡缸压力未能在2秒内达标。 | 气源供给压力足够高么?检查 MPYD /电缆 | 出现故障后会没有E705准备就绪 |
出现平衡故障时:
1.如果MPVD气阀没有坏时,可以通过用WD-40进行润滑气缸.
2.如果润滑无效直接检查连线.
3.连线无问题,直接换MPYD阀.
平衡缸回位信号: 焊接过程时如果平衡系统没有问题时,平衡缸回位反馈E719应该是没有反馈的,而当进行轴运行时E719要始终有.
| E719 | Equalizer is back | 平衡气缸返回 |
拆解MPVD控制阀:
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
伺服
+关注
关注
17文章
712浏览量
43660 -
控制阀
+关注
关注
1文章
96浏览量
14546
原文标题:气伺服焊钳平衡缸故障分析
文章出处:【微信号:gh_a8b121171b08,微信公众号:机器人及PLC自动化应用】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
热点推荐
流场可视化视角下的能耗溯源:电液伺服作动器内部能量损失机理研究
电液伺服作动器作为高端装备的核心执行元件,其性能直接决定了航空航天、重型机械、精密制造等领域的控制精度与响应速度。近年来,随着机载功率电传一体化技术的突破,电液伺服作动器正朝着“阀缸集成”方向快速

空调F3故障原因分析及解决方案
空调显示F3故障代码是用户在使用过程中可能遇到的常见问题之一,这一故障通常与温度传感器异常或相关电路问题有关。以下将结合具体案例和技术原理,从故障原因、检测方法到解决方案进行全面分析,
对于伺服行星减速机的轴承失效的原因分析
伺服行星减速机作为精密传动设备的核心部件,其轴承的可靠性直接影响整机寿命与性能。然而在实际应用中,轴承失效问题频发,轻则导致设备振动噪声增大,重则引发传动系统崩溃。本文将系统分析轴承失效的六大主因,并结合工程实践提出针对性解决方案。
伺服电机和伺服减速机如何配选的
伺服电机与伺服减速机的配选是工业自动化领域中的关键技术环节,直接影响设备的精度、效率和使用寿命。正确的配选需要综合考虑负载特性、运动参数、安装空间以及成本等因素。以下从工作原理、选型步骤、常见误区及实际应用四个方面展开详细分析。
伺服定位跑偏分析及解决方法
伺服系统在工业自动化领域扮演着核心角色,其定位精度直接影响生产效率和产品质量。然而在实际运行中,伺服定位跑偏问题频发,成为困扰工程师的技术难题。本文将系统分析跑偏成因,并结合实际案例提出针对性解决方案,为设备维护和系统优化提供参
伺服驱动器最常见的故障及解决方法
伺服驱动器作为工业自动化系统中的核心部件,其稳定性直接影响设备运行效率。根据市场反馈和技术统计,以下针对伺服驱动器六大高频故障现象、成因及解决方案进行系统性分析,并提供预防性维护建议。

伺服系统的常见故障和诊断方法
伺服系统作为现代工业自动化中的核心部件,广泛应用于数控机床、机器人、包装机械等领域。其高精度、快速响应的特性对设备性能至关重要,但复杂的结构也使得故障诊断成为维护难点。本文将系统分析伺服
疆鸿智能PROFIBUS集线器:破解天然气增压站网络单点故障难题
疆鸿智能PROFIBUS集线器:破解天然气增压站网络单点故障难题 在工业自动化领域,天然气增压站的控制系统可靠性直接关系到管网稳定与生产安全。近期在西北某大型天然气处理厂升级项目中,我

主轴伺服系统故障诊断方法
主轴伺服系统作为数控机床的核心部件,其运行状态直接影响加工精度和设备可靠性。随着智能制造的发展,对主轴伺服系统的故障诊断提出了更高要求。本文将系统阐述当前主流的故障诊断方法,并结合实际


如何通过数据分析识别设备故障模式?
通过数据分析识别设备故障模式,本质是从声振温等多维数据中提取故障特征,建立 “数据特征 - 故障类型” 的映射关系,核心可通过特征提取、模式匹配、趋势

判断伺服行星减速机出现噪音的异常
伺服行星减速机出现噪音通常被视为一种异常现象,这种噪音可能会影响设备的正常运行,甚至对工作环境和操作人员的健康造成不良影响。以下是对伺服行星减速机出现噪音异常的判断及可能原因的分析: 一、判断标准

【案例2.36】芯片启动异常的故障分析
【案例2.36】芯片启动异常的故障分析在某产品的调试中发现,板上核心处理芯片在每次启动后的表现不同,偶尔会出现无法启动的故障。经过几百次反复上下电测试发现,在大多数情况下,芯片启动后能正常工作,但有

轮毂电机不平衡电磁力对车轮定位参数的影响
[摘要] 轮毂电机驱动电动汽车将电机、减速机构和制动器等高度集成于车轮内。不同路面激励下的轮胎跳动、载荷不均和轴承磨损等造成电机气隙沿圆周分布不均,其所产生的不平衡电磁力将会通过减速机构或直接传递
发表于 06-10 13:17



评论