 dfrobot麦昆机器人与Micro:bit图形化编程简介
dfrobot麦昆机器人与Micro:bit图形化编程简介




简介
本书适用于中小学生学习机器人程序设计,也可作为校外机构以及机器人初学者的图形化编程入门教材,基于micro:bit青少年入门开发板及入门机器人平台——麦昆机器人,软件平台为图形化编程软件mind+。
该书共有22个趣味编程项目,均配有演示视频,帮助读者更容易的学习和上手。

本书覆盖了电脑互动编程,可以制作有趣的互动游戏及人机互动项目,也有离线编程,控制移动机器人麦昆,解锁麦昆机器人的丰富功能。每个案例都是在教学过程中总结而成,学生在大量的交互案例中,快乐的学习编程。在学习的过程中,锻炼学生解决问题的能力以及逻辑思维。
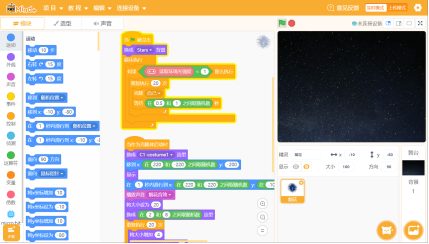
互动编程(实时模式)

麦昆机器人控制(上传模式)
该书不仅配有系统、完善的学习案例,还配有相应的教学视频(扫描书中二维码即可)。学生和老师可以根据自己的需求随时切换学习模式,能够更好的学习和实践对照。
作者简介
陈宝杰,女,首师大附中密云校区科技教师,密云区信息技术学科骨干教师,曾获全国高中信息技术优质课展评一等奖。带领的机器人团队最近在2015年、2017年分别获得北京市青少年机器人竞赛一等奖。2017年辅导学生的创意作品获得北京市第37届青少年科技创新大赛二等奖,全国创造力大赛金奖,并获得优秀指导教师。
目录
第一节 自制表情包 1
第二节 趣味电子琴 13
第三节 接苹果游戏 18
第四节 猫咪捉老鼠 23
第五节 发泄神器 30
第六节 聊天机器人 38
第七节 绚烂烟花 46
第八节 声音画笔 53
第九节 危险报警器 61
第十节 自动泡泡机 67
第十一节 麦昆机器人 72
第十二节 麦昆出动 77
第十三节 点亮氛围灯 82
第十四节 超声波避障 84
第十五节 机器人追光 86
第十六节 机器人巡线 89
第十七节 红外遥控机器人 94
第十八节 无线遥控机器人 97
第十九节 搜救机器人 101
第二十节 麦昆与物联网 106
第二十一节 限速机器人 112
第二十二节 物流机器人 116
参考文献 120
技术规格
书名:麦昆机器人和Micro:bit图形化编程(STEM教育丛书)
作者: 陈宝杰 沙靓雯
出版社:清华大学出版社
ISBN号:9787302532606
包装:平装
开本:203mmX260mm
出版时间:2019-07(第一版)
页数:118
字数:133000
正文语种:中文
-
嵌入式主板
+关注
关注
7文章
6107浏览量
36952 -
DFRobot
+关注
关注
4文章
1164浏览量
11928
发布评论请先 登录
RK3576机器人核心:三屏异显+八路摄像头,重塑机器人交互与感知
小萝卜机器人的故事
昆泰芯高速磁编码器实现机器人关节双端测量

机器人竞技幕后:磁传感器芯片激活 “精准感知力”
PPEC电源DIY套件:图形化算法编程,解锁电力电子底层算法实践
机器人芯片:智能机器的“大脑”与未来趋势
工业机器人的特点
PPEC新品发布丨图形化编程数字电源专用 ARM Cortex-M4 MCU

昆泰芯微电子KTM5900数据手册下载 24bit绝对角度磁性编码器 高精度智能磁性传感器芯片 适配机器人
盘点#机器人开发平台
一场图形化编程与树莓派的“跨界联姻”

使用 Thonny 对 XRP 机器人进行编程






 工商网监
工商网监
评论