 如何使用Arduino微控制器发出运动感应警报
如何使用Arduino微控制器发出运动感应警报

步骤1:您需要哪些组件
为此Arduino项目,您需要:
1个Arduino Uno
1个LED
1x压电蜂鸣器
1x面包板
1x跳线
您还需要一台安装了Arduino IDE的计算机(最低操作系统XP)。
步骤2:接线PIR传感器
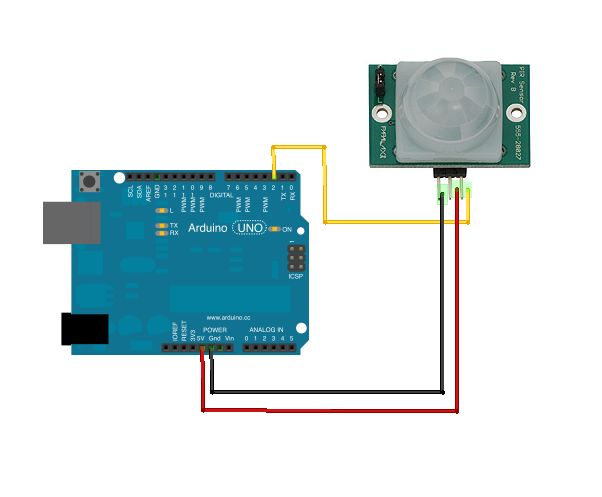
PIR传感器具有三个引脚:
-左侧的一个是GND(需要连接到GND引脚)
-中间的一个是OUT(需要连接到数字引脚)
-右边的是VCC(需要连接到5v)
将它连接到Arduino的数字引脚2,如图所示。
第3步:连接压电蜂鸣器
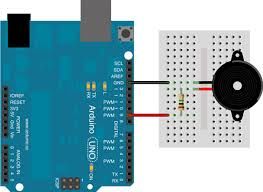
压电蜂鸣器有2个引脚:
-一个是GND(需要连接到Arduino的接地引脚)
-一针ds要连接到数字引脚,所以我们可以确定其音调
第4步:连接LED
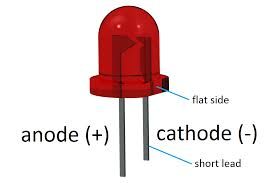
LED有两个销钉,阳极和阴极。阳极更长,并且始终连接到正电压。阴极较短,并且始终连接至负电压。
将阳极连接至引脚13,并将阴极连接至其旁边的GND引脚。
第5步:将草图上传到Arduino板
int inputPin = 2;
int pirState = LOW;
int val = 0;
int pinSpeaker = 10;
void setup(){
pinMode(ledPin,OUTPUT);
pinMode(inputPin,INPUT);
pinMode(pinSpeaker,OUTPUT);
Serial.begin(9600);
}
无效循环(){
val = digitalRead(inputPin);
if(val == HIGH){
digitalWrite(ledPin,HIGH);
playTone(300,160);
delay(150);
if(pirState == LOW){ pirState = HIGH;
}
}其他{
digitalWrite(ledPin,LOW);
playTone(0,0);
delay(300);
if(pirState == HIGH);
Serial.println(“运动结束!”);
pirState = LOW;
}
}
}
void playTone( long duration,int freq){持续时间* = 1000;
int period =(1.0/freq)* 1000000;
long经过时间= 0;
而(lapsed_time 《持续时间){
digitalWrite(pinSpeaker,HIGH);
delayMicroseconds(期间/2);
digitalWrite(pinSpeaker,LOW);
delayMicroseconds(期间/2);
经过时间+ =(期间);
},点击}
-
微控制器
+关注
关注
48文章
8250浏览量
162401 -
警报器
+关注
关注
2文章
72浏览量
20224 -
Arduino
+关注
关注
190文章
6515浏览量
195973
发布评论请先 登录
如何在 M55M1 系列微控制器上以低功耗模式使用运动检测功能?
从运动感知到有效执行控制的关键为什么是IMU?











 工商网监
工商网监
评论