 如何制作倒立摆机器人
如何制作倒立摆机器人

步骤1:收集材料
-MambaMax Pro电动机驱动程序(由castlecreations.com提供)
-MPU6050陀螺仪+加速度计
-反作用轮(我们用一个简单的盖子将花生酱罐盖好了)
-项目面包板,+ 5 V,0至+15 V可变,0至-15 V可变电源电压
-跳线-19厘米x 19厘米的木板(从剪贴板上剪下)
-两个1.5英寸直径的垫圈
-两个木块
-直径略小于垫圈孔的金属棒
-螺丝
-钻孔用孔
步骤2:构造机器人
安装直流电机方形木板中间:
-在木板中间钻一个孔使其大于直流电动机的短轴。
-在直流电动机的安装孔上钻另外的孔。
-将直流电动机穿过该孔并
将反作用轮固定在电动机上:
-将反作用轮固定在直流电动机上。
安装木板:
-在两个木板上分别钻一个孔,以便将金属棒紧紧地塞在两个木板之间。另外,在木块的一个角上钻一个孔。
-将金属杆推到其中一个木块上,先将垫圈放在板上,然后将板子再放在另一个垫圈上,最后再将另一个木制块。机器人的身体现已完成。
安装电气组件:
-将MPU6050安装在木板上方,使其位于木板的顶部。
-将Arduino Uno拧在其中一个木块上,使其位于与电机连接最靠近的一侧。
第3步:进行适当的电气连接
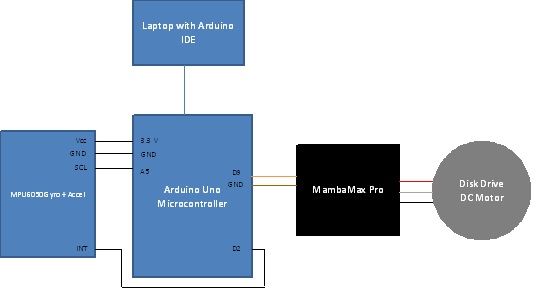
有关电路原理图,请参见图片。
构建电路后,将MambaMax Pro连接到试验板的+15电源。将其调整为+9伏。
第4步:创建机器人的软件
将提供的代码上传到Arduino的IDE中。
如果您还没有其他库,可能需要附加它们。
实现代码功能所需的库是:
PID库
I2C库
MPU6050库
如果您没有这些库,可以在Arduino网站上找到它们。请按照该站点中提供的说明进行正确的安装步骤。
步骤5:测试机器人
-将Arduino软件代码上传到Arduino Uno。
-打开Arduino的串行监视器(CTRL + Shift + m)
-打开MambaMax Pro的开关
-在键盘上键入一个字符
-观察机器人的反作用轮旋转。
步骤6:继续
该机器人当前不完整,因此需要执行下一步才能使该机器人正常工作。所需的步骤如下所示:
-安装更大的反作用轮,其重物的重量连接在反作用轮的外半径上。
-对电动机驱动器进行编程以使其反向运行
-对Arduino的PID控制器进行编程以使其起作用,以使反作用轮根据机器人的当前角度位置平衡机器人。
责任编辑:wv
-
机器人
+关注
关注
213文章
30580浏览量
219525 -
直流电机
+关注
关注
36文章
1772浏览量
73480 -
Arduino
+关注
关注
190文章
6515浏览量
195948
发布评论请先 登录





 工商网监
工商网监
评论