 一种新的手势追踪方法被披露,进行非常准确的手部跟踪
一种新的手势追踪方法被披露,进行非常准确的手部跟踪

手部跟踪在增强现实应用中非常有用,因为它提供了易于使用的自然用户界面来与数字信息交互,但它通常需要特殊的深度传感器和独立处理器等密集且昂贵的技术。谷歌的增强现实的愿景是使用Google Glass一般轻便的可穿戴设备来完成这一操作。 今天,一种新的手势追踪方法被披露,它只使用前置摄像头和基于AI算法的处理流程,就可以进行非常准确的手部跟踪。
该技术的主要创新是使用传统算法来检测手掌,然后使用基于AI的模型来预测手指的位置,并将这一运算代码命名为MediaPiPe的跨平台框架。
MediaPipe可以在手和手指上最多映射21个点,精度高达96%,并且可以在移动设备上完成所有操作(即不在云端)。
我们可以想象Google会在他们的独家设备上使用它,目前传闻中的Pixel 4已经包括用于手势控制的Soli传感器。理想情况下,新技术的出现将使创建丰富的AR体验变得容易和便宜,并且能够创建廉价但功能强大的AR眼镜。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
谷歌
+关注
关注
27文章
6259浏览量
111982 -
AR眼镜
+关注
关注
5文章
664浏览量
25326 -
AI算法
+关注
关注
0文章
274浏览量
13196
发布评论请先 登录
相关推荐
热点推荐
将 MCUX SDK LIN 堆栈集成到 Zephyr OS 中,是否有一种方法可以自动生成它们从 .ldf 文件?
我将 MCUX SDK LIN 堆栈集成到 Zephyr OS 中,现在正在 S32K344-wb 板上对其进行测试,但我想更改 cfg 文件,我想知道是否有一种方法可以自动生成它们从 .ldf 文件。
发表于 04-24 06:33
瑞芯微(EASY EAI)RV1126B 手势识别算法识别
1.手势识别算法简介Gestures手势识别算法一种先进的姿势估计模型,使用关键点数据集进行训练,能够检测图像或视频中人物的21个关键点与26种

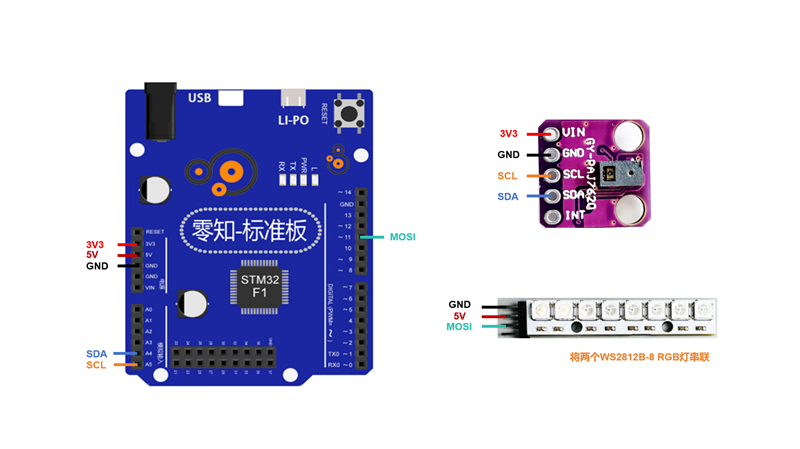
零知IDE——基于STM32F103RBT6的PAJ7620U2手势控制WS2812 RGB灯带系统
,手势跟踪模式下白色光点跟随手部 X 轴,亮度随手部 Y 轴平滑变化,尾影效果自然;移开手部自动切换流水灯 / 呼吸灯
五、PAJ762
发表于 12-29 19:04
零知IDE——基于STM32F103RBT6的PAJ7620U2手势控制WS2812 RGB灯带系统
基于STM32F103RBT6的手势控制LED系统,通过PAJ7620U2传感器识别手势动作,驱动WS2812B灯带实现交互式灯光效果。系统采用软件I2C通信和SPI+DMA驱动方案,支持挥手开关机、手部位置
【EASY EAI Nano-TB(RV1126B)开发板试用】AI手部21关键点识别
:
【总结】
通过外接摄像头,可以非常准确的识别手部的21个关键点。在实际应用中,可以通过这21个关键点来判断手势等等。
发表于 11-21 11:31
目标追踪的简易实现:模板匹配
的信息在视频的每一帧图象中进行搜寻,获取每一帧中目标的大小和坐标。对视频流作目标追踪的好处是,我们不仅可以动态地对物体进行定位,还可以由此分
发表于 10-28 07:21
指令集测试的一种纠错方法
本文描述在进行指令集测试的一种纠错方法
1.打开测试指令集对应的dump文件
dump文件是指由汇编文件进行反汇编之后,可以供人阅读指令的反汇编文件。其包含了每
发表于 10-24 14:04
【技术讨论】智能戒指手势交互:如何优化PCBA成本与实现<20ms低延迟?
,是否需在MCU上部署轻量级AI模型(如TinyML)进行本地手势识别,以替代传统滤波算法,平衡实时性与准确性
最终的核心目标是在控制早期延迟的情况下,早期的PCBA成本(元器件+生产)单个控制在100以内。
诚邀各位嵌入式开发
发表于 10-18 13:04
基于sEMG与手部追踪的感官VR交互上肢康复系统
对握力的无控制器实时映射。系统采用手部追踪技术结合sEMG信号处理流程——包括移动平均滤波、最大自主收缩值(MVC)校准及min–max归一化——将用户的握力强度转化

零成本钢铁侠手套!树莓派+OpenCV 秒变手势遥控器!
大家好,这是一个树莓派和OpenCV的连载专题。使用树莓派与OpenCV实现姿态估计和面部特征点追踪使用树莓派与OpenCV实现面部和运动追踪的云台系统使用树莓派和OpenCV实现手部

如何使用树莓派与OpenCV实现面部和运动追踪的云台系统?
大家好,这是一个树莓派和OpenCV的连载专题。使用树莓派与OpenCV实现姿态估计和面部特征点追踪使用树莓派与OpenCV实现面部和运动追踪的云台系统使用树莓派和OpenCV实现手部
一种新的无刷直流电机反电动势检测方法
无位置传感器无刷直流电机的控制算法是近年来研究的热点之一,有霍尔位置信号直流电机根据霍尔状态来确定通断功率器件。利用无刷直流电机的数学模型,根据反电动势检测原理,提出了一种新的线反电动势检测方法
发表于 08-07 14:29
一种新的无刷直流电机反电动势检测方法
无位置传感器无刷直流电机的控制算法是近年来研究的热点之一,有霍尔位置信号直流电机根据霍尔状态来确定通断功率器件。利用无刷直流电机的数学模型,根据反电动势检测原理,提出了一种新的线反电动势检测方法
发表于 08-04 14:59
基于RK3576开发板的yolov11-track多目标跟踪部署教程
的显著进步基础上,YOLO11在架构和训练方法上引入了重大改进,使其成为广泛计算机视觉任务的灵活选择。Bytetrack多目标跟踪是一种tracking-by-det

【嘉楠堪智K230开发板试用体验】01 Studio K230开发板Test2——手掌,手势检测,字符检测
架构,这是一种高效的模式识别方法,特别擅长从复杂图像数据中提取特征和识别目标。
高能效比与低延迟: 在执行高强度计算时,KPU 能保持高能效比(低功耗)和低延迟(高速度),支持实时图像分析。
高级视觉
发表于 07-10 09:45



评论