 自动倒酒机器人的制作教程
自动倒酒机器人的制作教程

第1步:零件清单
电气元件
1。导航:
(2)减速电机
超声波距离传感器
2。测量重量:
(5KG)直杆式微型称重传感器(可在厨房秤中找到)
HX711称重传感器
第3。显示:
LCD屏幕(4x20)
4。浇注:
微型潜水泵(直流电机3-6V)
2n2222晶体管(EBC)
1K电阻器
1N4007二极管整流器
5。其他:
迷你面包板
电池组
跳线(M/M,F/F,F/M)
焊接铁
DESIGN
6。现成的:
(2)车轮+万向轮
玻璃瓶(直径8厘米)
玻璃(直径3.5厘米)
9毫米水管
(30)M3x16螺栓
(15)M3x16螺母
(4)M3x50螺栓
(5)M3x5螺栓
(2)M5x16螺栓
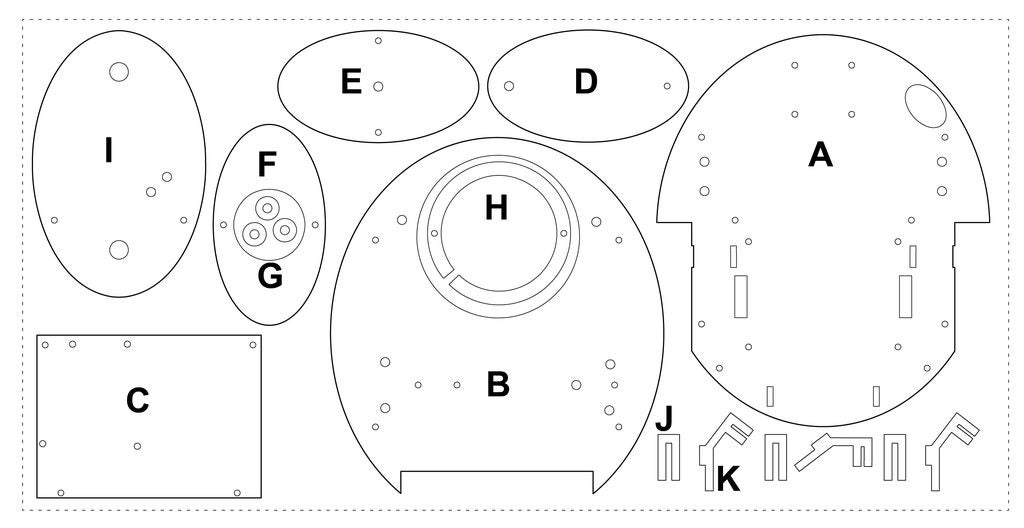
7。定制零件:
激光切割有机玻璃3.0毫米(25厘米x 50厘米):机器人机箱顶部和底部平台,Arduino和面包板平台,LDC支架,超声波传感器支架,秤顶和底部平台,罐盖。
3D打印部件:移动电源支架
AND 。..
很多酒精!!!
第2步:逻辑与设置

1。导航:
BotTender的导航由位于机器人前方的超声波传感器采集的数据控制。机器人插入电源后,机器人开始读取与炮弹玻璃的距离并开始接近它。当它到达一定距离时,它停止并等待客户将玻璃放在称重传感器板上。
直流电机和Arduino之间的通信是通过使用L293D电机驱动器IC实现的。该模块可帮助我们控制两个直流电机的速度和旋转方向。虽然可以使用PWM(脉冲宽度调制)技术控制速度,但是使用H桥控制方向。
如果脉冲频率增加,则施加在电机上的电压也会增加,导致电机更快地旋转。
有关使用H桥控制直流电机的更多详细信息,请参见此处。
2。测量重量:
逻辑和电路:使用直杆式称重传感器和HX711ADC转换板放大从重量传感器接收的信号。如电路图所示,将它们连接到Arduino和面包板。
HX711连接到:
GND:面包板( - )
DATA:引脚6时钟:引脚2
VCC:面包板(+)
E +:连接到称重传感器的红色
E-:连接到蓝色
A-:连接到白色
A +:连接到BLACK
B-:无连接
B +:无连接
放大器启用Arduino检测称重传感器的电阻变化。当施加压力时,电阻将响应于施加的压力而改变。
设置:在我们的例子中,我们使用的是一个微型称重传感器(5KG)。称重传感器顶部和底部有2个孔,箭头表示偏转方向。将箭头指向下方,将刻度的底部连接到机器人的顶部平台。将称重传感器顶部的相对孔连接到秤的顶部。
连接到Arduino后,请下载本页底部的HX711放大器库,并使用下面提供的校准草图校准称重传感器。
下载HX711库:https://github.com/bogde/HX711
校准草图:
3。显示:
逻辑和电路:将LCD屏幕(4x20)连接到I2C接口。如果分开,则需要进行焊接。 I2C中间相由两个信号组成:SCL和SDA。 SCL是时钟信号,SDA是数据信号。 I2C连接到:
GND:面包板( - )
VCC:面包板(+)
SDA:引脚A4
SCL:pin A5
下载IC2库:https://github.com/bogde/HX711
4。浇注:
您需要一个晶体管,一个1K电阻和一个二极管将水泵连接到Arduino。 (参考下面的电路图)。当称重传感器读取空玻璃的重量时,水泵被激活。一旦玻璃充满,称重传感器读取重量并关闭水泵。
步骤3:电路图

第4步:代码
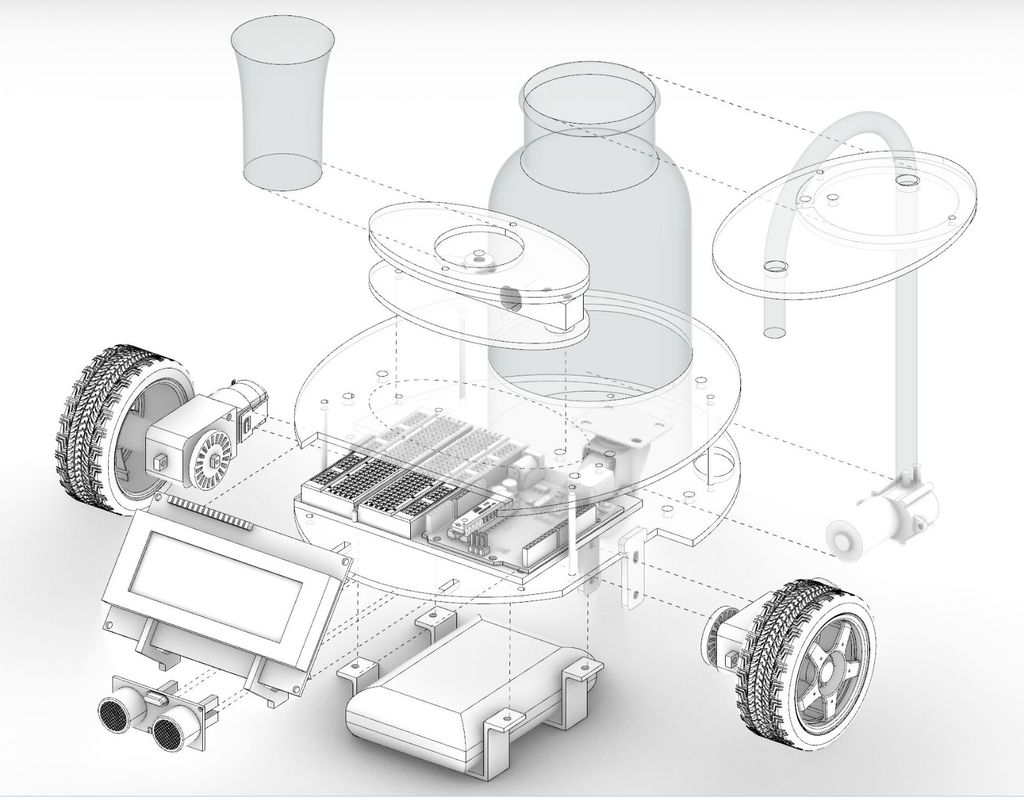
第5步:设计


设计意图
主要设计意图是使用透明材料并增强电子设备的存在。这不仅有助于我们更快地确定电路中的问题,而且还可以在需要维修时简化拆卸。由于我们正在使用酒精,因此对于我们的设计来说,以紧凑的方式将电子设备和酒精尽可能分开是至关重要的。为了实现这一目标,我们将现成的产品集成到我们的定制设计中。因此,我们提出了一个多层系统,将电子设备保持在底层,并将镜头服务区域提升到顶层。
自定义部件:激光切割
1。正文
BotTender由两个主要层叠在一起,只有足够的距离,可以将电线插入arduino和面包板。底层主要用于将电机,后轮,电子平台和电池座连接到机身,以及作为瓶子的底座,顶层容纳一个孔来稳定瓶子和足够的空间用于称重传感器及其板。
2。称重传感器板
称重传感器板的设计考虑了厨房秤的工作原理。称重传感器从其螺栓孔连接到顶层和底层。在顶层上放置另一层,以指示放置小玻璃并将其保持在适当位置的精确槽。
3。 LCD和超声波传感器支架
LCD支架设计用于使屏幕与地平面保持45度旋转,而超声波传感器支架可使传感器保持垂直并尽可能靠近地面,以便轻松检测镜头玻璃。
4。瓶盖
我们设计了一个瓶盖,可以将饮料保持在封闭的环境中,但仍允许 管和水泵电缆从瓶中出来。盖子有2层:顶层用于保持管子就位,底层用于将盖子锁定在瓶子上,并使水泵电缆可以接触到arduino。然后通过使用侧面上的相应小孔将这两个层彼此连接以插入螺栓。
自定义部件:3D打印
5。移动电源持有人
对于我们的BotTender,我们决定使用外部电源:移动电源。因此,我们需要一个定制的电池座,用于我们选择的移动电源的尺寸。在Rhinoceros中设计这件作品后,我们使用黑色PLA进行3D打印。然后使用钻头打开螺栓孔。
步骤6:制造和组装

大部分定制零件在我们的设计是通过激光切割(1)3mm有机玻璃板(25cmx50cm)实现的。只有移动电源支架是3D打印的,但如果需要,可以用激光切割件代替。
焊接:
需要焊接一些东西。 I2C接口的16个引脚连接到LCD屏幕,水泵接地和电源线连接到公跳线,HX711放大器连接到称重传感器,齿轮电机连接到跳线。
激光切割后,电子元件已经焊接完毕,电路组装在Arduino和面包板上,开始按如下方式组装机器人:
逐步组装:
使用底部平台并使用螺栓连接后轮。
使用提供的附件将齿轮电机连接到车轮,然后连接到平台的底部。
使用3D打印的电池座,将移动电源板连接到平台的底部。
用4个螺栓将小底板安装到底部平台上。
安装Arduino和面包板。确保Arduino位于右侧,以便更轻松地连接到下方的移动电源。此时,您的电路需要在适当的位置完成。
使用顶部和底部底板组装称重传感器。指示重量容量的箭头需要指向下方。
将称重传感器设置安装到顶部平台,并将平台连接到机器人主体的底部。
使用支架安装超声波传感器和LCD。如有必要,可以粘贴这些。
将水管连接到水泵上,然后将泵引入玻璃瓶内。确保电缆插入所提供的孔之间。
将玻璃瓶和玻璃杯放在适当的位置。
将酒精倒入玻璃罐中,您就可以使用BotTender了!
-
机器人
+关注
关注
213文章
30580浏览量
219545
发布评论请先 登录
RK3576机器人核心:三屏异显+八路摄像头,重塑机器人交互与感知
小萝卜机器人的故事
工业机器人的特点
工业机器人与协作机器人概念不同






 工商网监
工商网监
评论