 机器人坦克制作图解
机器人坦克制作图解

第1步:材料清单
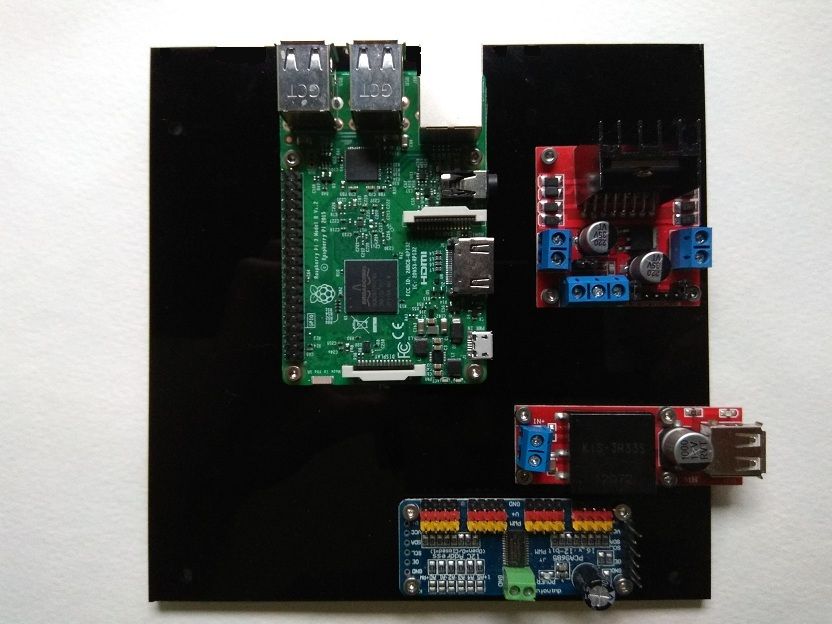
Raspberry Pi
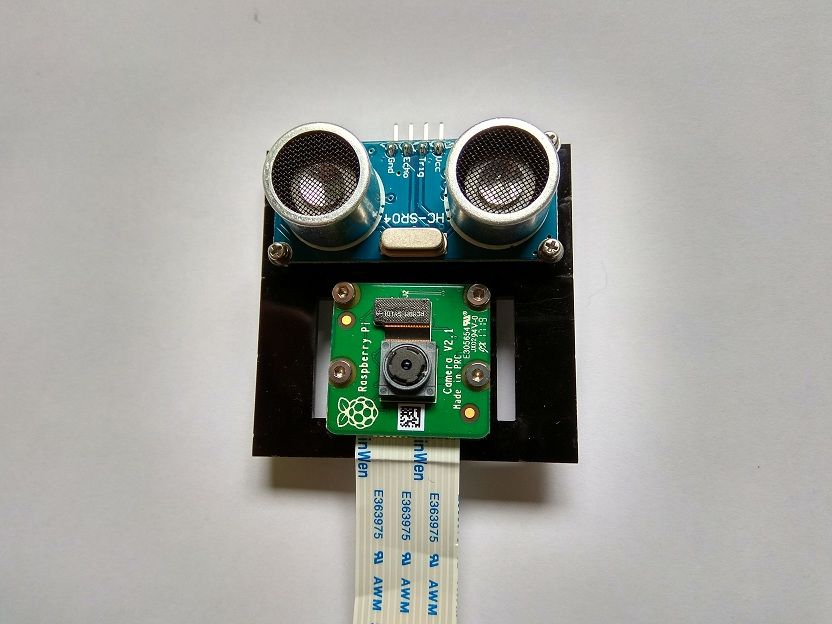
摄像机
电机控制器
PWM控制器
2x18650电池
机箱
平移和倾斜支架
免责声明。提到的清单没有完成。有许多小东西,如电线,螺丝,丙烯酸板。
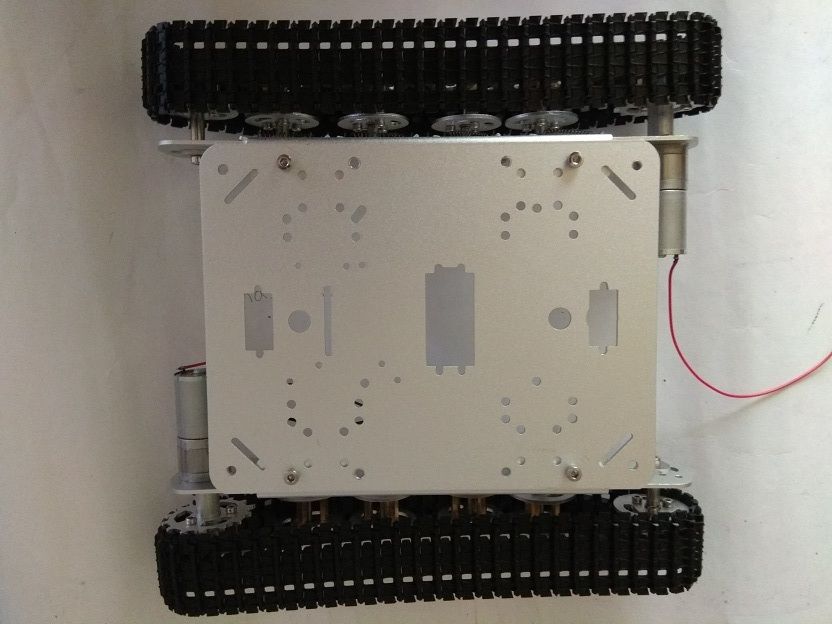
第2步:建造油箱底盘
步骤3:将电气连接到印版
步骤4:将摄像机和测距仪连接到电路板
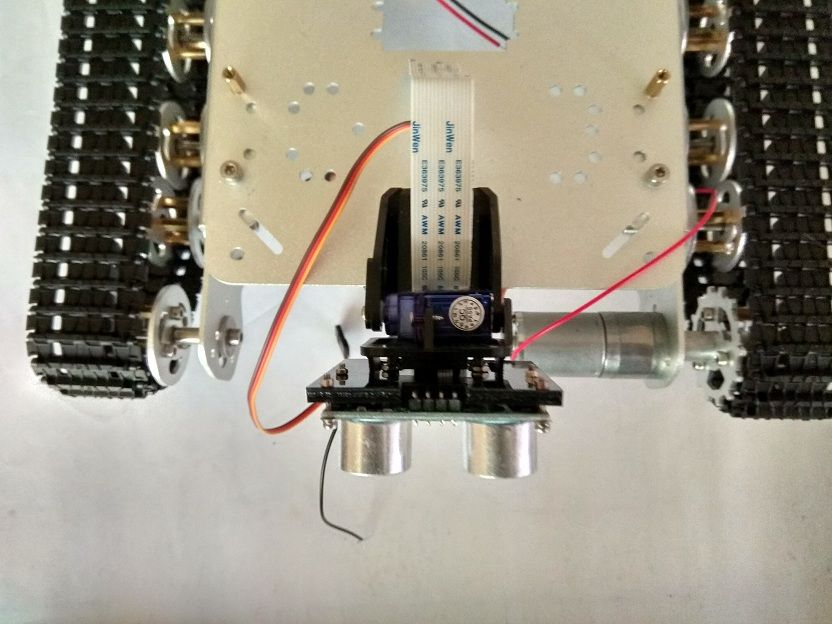
步骤5:将相机板连接到支架并连接到机箱
步骤6:连接电池座到机箱
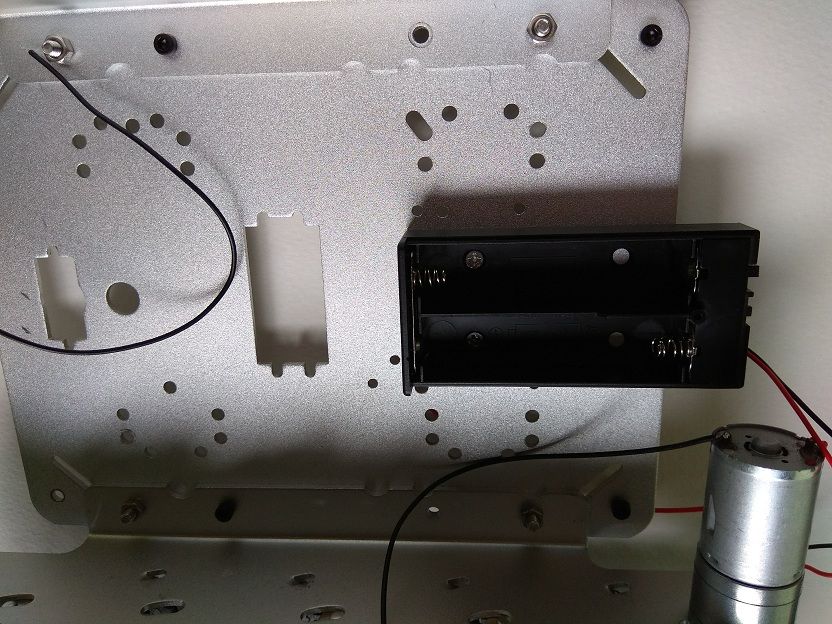
步骤7:将电路板连接到机箱并连接所有东西

步骤8:安装软件
安装Raspbian Jessie
安装OpenCV
安装MJPG-Streamer
从GitHub获取控制服务代码
As AI使用的例子有:
- 来自OpenCV的Haar级联的猫探测器
- 具有OpenCV-DNN的物体探测器
- 具有Tensorflow的图像分类器
Ť他的REST界面是:
GET/ping
GET/version
GET/name
GET/dist
POST/fwd/on
POST/fwd/off
POST/back/on
POST/back/off
POST/left/on
POST/left/off
POST/right/on
POST/right/off
POST/photo/make
GET/photo/:phid
GET/photo/list
POST/cam/up
POST/cam/down
POST/cam/right
POST/cam/left
POST/detect/haar/:phid
POST/detect/dnn/:phid
POST/classify/tf/:phid
步骤9:设置连接
为Raspberry Pi设置Wi-Fi连接有一种无头方式。
将带有Raspbian的microSD卡插入计算机。
创建一个文本文件wpa_supplicant。 conf with content:
ctrl_interface = DIR =/var/run/wpa_supplicant GROUP = netdev
update_config = 1 country = US
network = {ssid =“your-wifi-network”psk =“your-wifi-password”key_mgmt = WPA-PSK}
还建议创建一个名为“ssh”的空文件。它将允许远程访问RPI(不要忘记更改默认密码)。
步骤10:获取Android应用程序
从Google Play安装Android应用程序
通过该应用程序,可以驾驶坦克,移动摄像机,观看实时视频,拍照,检测照片上的物体。/p》
-
机器人
+关注
关注
213文章
30580浏览量
219583 -
树莓派
+关注
关注
122文章
2069浏览量
109709
发布评论请先 登录





 工商网监
工商网监
评论