完善资料让更多小伙伴认识你,还能领取20积分哦,立即完善>
标签 > 数控系统

数控系统是数字控制系统的简称,英文名称为(Numerical Control System),根据计算机存储器中存储的控制程序,执行部分或全部数值控制功能,并配有接口电路和伺服驱动装置的专用计算机系统。
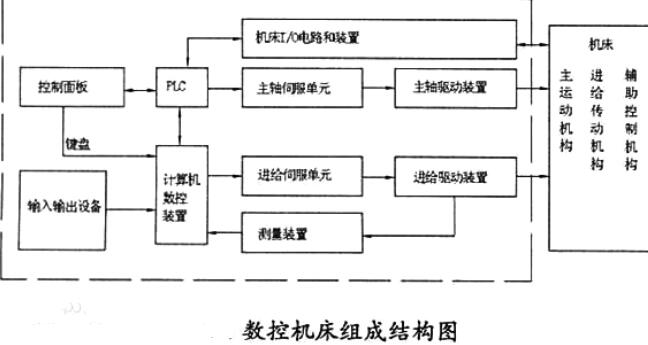
世界上的数控系统种类繁多,形式各异,组成结构上都有各自的特点。这些结构特点来源于系统初始设计的基本要求和硬件和软件的工程设计思路。对于不同的生产厂家来说,基于历史发展因素以及各自因地而异的复杂因素的影响,在设计思想上也可能各有千秋。例如,在上世界90年代,美国Dynapath系统采用小板结构,热变形小,便于板子更换和灵活结合,而日本FANUC系统则趋向大板结构,减少板间插接件,使之有利于系统工作的可靠性。然而无论哪种系统,它们的基本原理和构成是十分相似的。一般整个数控系统由三大部分组成,即控制系统,伺服系统和位置测量系统。控制系统硬件是一个具有输入输出功能的专用计算机系统,按加工工件程序进行插补运算,发出控制指令到伺服驱动系统;测量系统检测机械的直线和回转运动位置、速度,并反馈到控制系统和伺服驱动系统,来修正控制指令;伺服驱动系统将来自控制系统的控制指令和测量系统的反馈信息进行比较和控制调节,控制PWM电流驱动伺服电机,由伺服电机驱动机械按要求运动。这三部分有机结合,组成完整的闭环控制的数控系统。
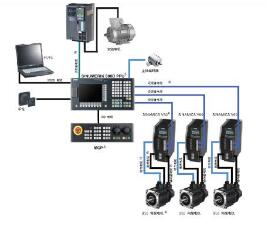
控制系统硬件是具有人际交互功能,具有包括现场总线接口输入输出能力的专用计算机。伺服驱动系统主要包括伺服驱动装置和电机。位置测量系统主要是采用长光栅或圆光栅的增量式位移编码器。
数控系统是数字控制系统的简称,英文名称为(Numerical Control System),根据计算机存储器中存储的控制程序,执行部分或全部数值控制功能,并配有接口电路和伺服驱动装置的专用计算机系统。通过利用数字、文字和符号组成的数字指令来实现一台或多台机械设备动作控制,它所控制的通常是位置、角度、速度等机械量和开关量。
世界上的数控系统种类繁多,形式各异,组成结构上都有各自的特点。这些结构特点来源于系统初始设计的基本要求和硬件和软件的工程设计思路。对于不同的生产厂家来说,基于历史发展因素以及各自因地而异的复杂因素的影响,在设计思想上也可能各有千秋。例如,在上世界90年代,美国Dynapath系统采用小板结构,热变形小,便于板子更换和灵活结合,而日本FANUC系统则趋向大板结构,减少板间插接件,使之有利于系统工作的可靠性。然而无论哪种系统,它们的基本原理和构成是十分相似的。一般整个数控系统由三大部分组成,即控制系统,伺服系统和位置测量系统。控制系统硬件是一个具有输入输出功能的专用计算机系统,按加工工件程序进行插补运算,发出控制指令到伺服驱动系统;测量系统检测机械的直线和回转运动位置、速度,并反馈到控制系统和伺服驱动系统,来修正控制指令;伺服驱动系统将来自控制系统的控制指令和测量系统的反馈信息进行比较和控制调节,控制PWM电流驱动伺服电机,由伺服电机驱动机械按要求运动。这三部分有机结合,组成完整的闭环控制的数控系统。
控制系统硬件是具有人际交互功能,具有包括现场总线接口输入输出能力的专用计算机。伺服驱动系统主要包括伺服驱动装置和电机。位置测量系统主要是采用长光栅或圆光栅的增量式位移编码器。
从硬件结构上的角度,数控系统到目前为止可分为两个阶段共六代,第一阶段为数值逻辑控制阶段,其特征是不具有CPU,依靠数值逻辑实现数控所需的数值计算和逻辑控制,包括第一代是电子管数控系统,第二代是晶体管数控系统,第三代是集成电路数控系统;第二个阶段为计算机控制阶段,其特征是直接引入计算机控制,依靠软件计算完成数控的主要功能,包括第四代是小型计算机数控系统,第五代是微型计算机数控系统,第六代是PC数控系统。
由于上世纪90年代开始,PC结构的计算机应用的普及推广,PC构架下计算机CPU及外围存储、显示、通讯技术的高速进步,制造成本的大幅降低,导致PC构架数控系统日趋成为主流的数控系统结构体系。PC数控系统的发展,形成了“NC+PC”过渡型结构,既保留传统NC硬件结构,仅将PC作为HMI。代表性的产品包括FANUC的160i,180i,310i,840D等。还有一类即将数控功能集中以运动控制卡的形式实现,通过增扩NC控制板卡(如基于DSP的运动控制卡等)来发展PC数控系统。典型代表有美国DELTA TAU公司用PMAC多轴运动控制卡构造的PMAC-NC系统。另一种更加革命性的结构是全部采用PC平台的软硬件资源,仅增加与伺服驱动及I/O设备通信所必需的现场总线接口,从而实现非常简洁硬件体系结构。
软件结构
(1)输入数据处理程序
它接收输入的零件加工程序,将标准代码表示的加工指令和数据进行译码、数据处理,并按规定的格式存放。有的系统还要进行补偿计算,或为插补运算和速度控制等进行预计算。通常,输入数据处理程序包括输入、译码和数据处理三项内容。
(2)插补计算程序
CNC系统根据工件加工程序中提供的数据,如曲线的种类、起点、终点、既定速度等进行中间输出点的插值密化运算。上述密化计算不仅要严格遵循给定轨迹要求还要符合机械系统平稳运动加减速的要求。根据运算结果,分别向各坐标轴发出形成进给运动的位置指令。这个过程称为插补运算。计算得到进给运动的位置指令通过CNC内或伺服系统内的位置闭环、速度环、电流环控制调节,输出电流驱动电机带动工作台或刀具作相应的运动,完成程序规定的加工任务。
CNC系统是一边插补进行运算,一边进行加工,是一种典型的实时控制方式。
(3)管理程序
管理程序负责对数据输入、数据处理、插补运算等为加工过程服务的各种程序进行调度管理。管理程序还要对面板命令、时钟信号、故障信号等引起的中断进行处理。在PC化的硬件结构下,管理程序通常在实时操作系统的支持下实现。
(4)诊断程序
诊断程序的功能是在程序运行中及时发现系统的故障,并指出故障的类型。也可以在运行前或故障发生后,检查系统各主要部件(CPU、存储器、接口、开关、伺服系统等)的功能是否正常,并指出发生故障的部位。

广州数控设备有限公司(简称:广州数控)成立于1991年,历经创业、创新、创造。面向数控机床行业、自动化控制领域、注塑制品行业。中国南方数控产业基地,广...
国产高档数控系统的差距,还表现在产品的系列化不全,如伺服电机、伺服驱动从小到大各种规格,国外都有,而我们的规格有限;在高速(快速进给速度40米/分以上)...
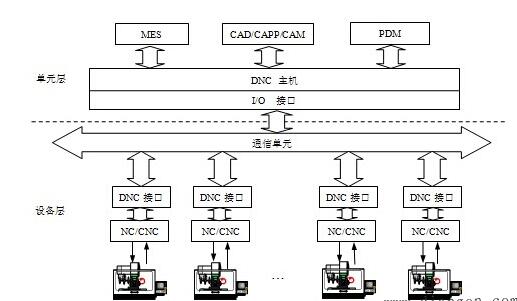
设计和采用DNC系统的主要目的之一,是改变数控加工程序输入方式,直接通过计算机之间的通信功能,联机下载;同时,减少数控机床配备穿孔机等硬设备的费用,降低...
本文主要阐述了数控系统发展现状及发展趋势。1952 年,美国麻省理工学院研制出第一台试验性数控系统,开创了世界数控系统技术发展的先河。20 世纪 80 ...
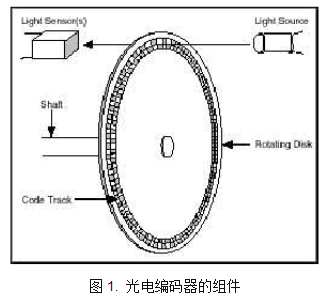
除此之外,有些正交编码器还包含被称为零信号或者参考信号的第三个输出通道。这个通道每旋转一圈输出一个单脉冲。你可以使用这个单脉冲来精确计算某个参考位置。在...

高速化、高精度、低成本、小型化数控控制系统已经成为数控机床加工行业的发展趋势。本文提出QT+Linux+Microblaze的设计方法,由QT设计人机交...
本文首先介绍了数控系统的常见故障,其次介绍了数控系统常见故障及造成原因,最后介绍了数控系统故障诊断常用的8种方法。
自从中国将“装备制造业”列为国家发展战略后,中国的装备制造业取得了突飞猛进的发展,很多大型装备的制造能力都已经跃居世界先进水平,甚至成为世界的顶级水平,...
计算机数控系统由硬件和软件两部分构成,对CNC系统体系结构的认识应该从硬件和软件两个方面来进行。其核心是计算机数字控制装置。它通过系统控制软件配合系统硬...
车刀刀尖半径补偿是数控车削加工中的常见问题,本文就刀尖半径的影响进行分析,根据不同功能的数控系统进行刀尖半径补偿方法等进行介绍。
从1952年美国麻省理工学院研制出第一台试验性 数控系统 ,到现在已走过了46年历程。数控系统由当初的电子管式起步,经历了以下几个发展阶段,请看本文详解...
2020-03-06 标签:数控系统 7452 0
数控系统的主要功能:CNC装置能控制的轴数以及能同时控制(即联动)轴数是主要性能之一。一般数控车床只需2轴控制2轴联动;一般铣床需要2轴半或3轴控制、3...
数控系统一般应用于数控机床与工业机器人等工控自动化装备,这些装备广泛应用于国防军工、汽车船舶、机械制造和石油化工等工业,数控系统行业因此与这些工业行业息息相关。
由于数控机床自动化程度高,结构复杂,所以故障率也较普通机床设备高,维修难度系数也较大,同时对数控机床维修人员的专业技术要求也非常高,当数控机床出现故障后...
数控等离子切割机弧切割起弧方式 1、接触式:即把与极针绝缘的喷嘴贴在工件(联接切割电源正端)上,然后把高频高压电流加到联接电源负端的电极针(钨针),使极...
数控体系的逻辑操控,如刀库办理,液压发动等,主要由PLC来完结,要完结这些操控就有必要收集各操控点的状况信息,如断电器,伺服阀,指示灯等。因此它与外界品...
钣金加工在生活中无处不在,小到厨房的不锈钢厨具、医药器械、计算机机箱、房间的通风管道,大到汽车的金属外壳、航空、船舶、轨道交通等,这些金属薄板通过手工或...
 换一批
换一批
编辑推荐厂商产品技术软件/工具OS/语言教程专题
| 电机控制 | DSP | 氮化镓 | 功率放大器 | ChatGPT | 自动驾驶 | TI | 瑞萨电子 |
| BLDC | PLC | 碳化硅 | 二极管 | OpenAI | 元宇宙 | 安森美 | ADI |
| 无刷电机 | FOC | IGBT | 逆变器 | 文心一言 | 5G | 英飞凌 | 罗姆 |
| 直流电机 | PID | MOSFET | 传感器 | 人工智能 | 物联网 | NXP | 赛灵思 |
| 步进电机 | SPWM | 充电桩 | IPM | 机器视觉 | 无人机 | 三菱电机 | ST |
| 伺服电机 | SVPWM | 光伏发电 | UPS | AR | 智能电网 | 国民技术 | Microchip |
| 开关电源 | 步进电机 | 无线充电 | LabVIEW | EMC | PLC | OLED | 单片机 |
| 5G | m2m | DSP | MCU | ASIC | CPU | ROM | DRAM |
| NB-IoT | LoRa | Zigbee | NFC | 蓝牙 | RFID | Wi-Fi | SIGFOX |
| Type-C | USB | 以太网 | 仿真器 | RISC | RAM | 寄存器 | GPU |
| 语音识别 | 万用表 | CPLD | 耦合 | 电路仿真 | 电容滤波 | 保护电路 | 看门狗 |
| CAN | CSI | DSI | DVI | Ethernet | HDMI | I2C | RS-485 |
| SDI | nas | DMA | HomeKit | 阈值电压 | UART | 机器学习 | TensorFlow |
| Arduino | BeagleBone | 树莓派 | STM32 | MSP430 | EFM32 | ARM mbed | EDA |
| 示波器 | LPC | imx8 | PSoC | Altium Designer | Allegro | Mentor | Pads |
| OrCAD | Cadence | AutoCAD | 华秋DFM | Keil | MATLAB | MPLAB | Quartus |
| C++ | Java | Python | JavaScript | node.js | RISC-V | verilog | Tensorflow |
| Android | iOS | linux | RTOS | FreeRTOS | LiteOS | RT-THread | uCOS |
| DuerOS | Brillo | Windows11 | HarmonyOS |
关注我们的微信

下载发烧友APP

电子发烧友观察

版权所有 © 湖南华秋数字科技有限公司
电子发烧友 (电路图) 湘公网安备43011202000918 电信与信息服务业务经营许可证:合字B2-20210191 工商网监
湘ICP备 2023018690 号
工商网监
湘ICP备 2023018690 号




