 电子发烧友App
电子发烧友App












 创作
创作 发文章
发文章 发帖
发帖  提问
提问  发资料
发资料 发视频
发视频资料介绍
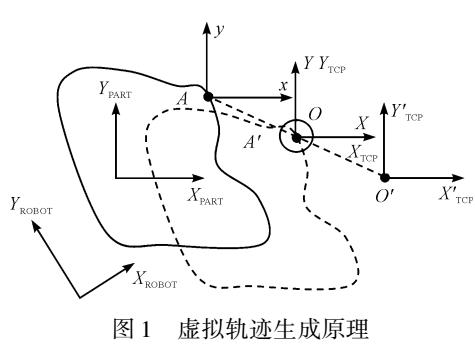
针对机器人末端抓持工件时,无法利用生成在工件上的轮廓点进行去毛边加工的问题,对机器人末端抓持工件在工具固定的情况下去毛边加工的方法进行研究,提出在确定工件加工轮廓与机器人末端TCP的固定位姿关系之后,将固定在机器人工作空间中的工具上一点设置为虚拟TCP,以该虚拟TCP为基准,将附着于机器人末端工件上的加工轮廓点映射成机器人工作空间中的虚拟轨迹点的方法。在给出工件上轨迹点与虚拟轨迹点的映射关系,完成虚拟TCP以及机器人末端TCP设置的基础上,在Fanuc机器人仿真软件RoboGuide中对该方法进行了运动仿真验证后进行了加工,测量了其刀具进给量。实验结果表明:利用该方法对机器人夹持的工件进行去毛边加工,完全满足生产加工的精度要求。
下载该资料的人也在下载
下载该资料的人还在阅读
更多 >
- 库卡机器人Ethernet/IP通讯设置手册 18次下载
- 基于Matlab的机构与机器人分析资料下载 10次下载
- 基于DSP和PC的农业机器人控制系统 16次下载
- 虚拟现实技术在机器人臂灵巧手遥操作中的应用 22次下载
- 机器人技术及其应用说明 4次下载
- 如何进行双足竞步机器人机构和控制系统的设计 12次下载
- 基于ABB机器人TCP的设定 9次下载
- 激光加工机器人工作原理与组成及应用详解 6次下载
- 机器人的虚拟监控技术系统设计研究 19次下载
- 虚拟机器人的结构与功能 4次下载
- 深刻理解机器人TCP 3次下载
- 工业机器人TCP的含义和TCP类型的介绍 13次下载
- 智能机器人型钢加工系统 6次下载
- KUKA机器人TCP(工具中心点)设定 36次下载
- 基于虚拟控件的遥操作救灾机器人界面 7次下载
- 上位机C#通过TCP/IP和机器人通讯 728次阅读
- 工业机器人虚拟仿真软件简述 3456次阅读
- 什么是EPSON机器人与上位机TCP通信 2389次阅读
- 浅析KUKA机器人气伺服焊钳虚拟外部轴的配置文件 747次阅读
- 大众标准里机器人程序中P值的设置存在那里? 472次阅读
- 虚拟机:Ubuntu的Thinkpad电池设置 2268次阅读
- 面对疫情 医疗机器人能帮上什么忙? 2022次阅读
- ABB机器人如何建立外部TCP 1.2w次阅读
- 常用的机器人编程方法有哪些 1.4w次阅读
- 机器人4大坐标系讲解 2.1w次阅读
- 如何实现ABB机器人和视觉系统间的TCP/IP通讯呢? 2.1w次阅读
- ABB机器人如何与相机详细方法通讯图文讲解 1.6w次阅读
- 工业机器人虚拟仿真软件是一个很好的工业机器人入门途径 3.3w次阅读
- 机器人系统常用仿真软件介绍和效果 7847次阅读
- 工业机器人虚拟样机系统的研究 1307次阅读

 上传资料赚积分
上传资料赚积分下载排行
本周
- 1TC358743XBG评估板参考手册
- 1.36 MB | 330次下载 | 免费
- 2开关电源基础知识
- 5.73 MB | 11次下载 | 免费
- 3100W短波放大电路图
- 0.05 MB | 4次下载 | 3 积分
- 4嵌入式linux-聊天程序设计
- 0.60 MB | 3次下载 | 免费
- 5DIY动手组装LED电子显示屏
- 0.98 MB | 3次下载 | 免费
- 6基于FPGA的C8051F单片机开发板设计
- 0.70 MB | 2次下载 | 免费
- 751单片机PM2.5检测系统程序
- 0.83 MB | 2次下载 | 免费
- 8基于51单片机的RGB调色灯程序仿真
- 0.86 MB | 2次下载 | 免费
本月
- 1OrCAD10.5下载OrCAD10.5中文版软件
- 0.00 MB | 234315次下载 | 免费
- 2555集成电路应用800例(新编版)
- 0.00 MB | 33566次下载 | 免费
- 3接口电路图大全
- 未知 | 30323次下载 | 免费
- 4开关电源设计实例指南
- 未知 | 21549次下载 | 免费
- 5电气工程师手册免费下载(新编第二版pdf电子书)
- 0.00 MB | 15349次下载 | 免费
- 6数字电路基础pdf(下载)
- 未知 | 13750次下载 | 免费
- 7电子制作实例集锦 下载
- 未知 | 8113次下载 | 免费
- 8《LED驱动电路设计》 温德尔著
- 0.00 MB | 6656次下载 | 免费
总榜
- 1matlab软件下载入口
- 未知 | 935054次下载 | 免费
- 2protel99se软件下载(可英文版转中文版)
- 78.1 MB | 537797次下载 | 免费
- 3MATLAB 7.1 下载 (含软件介绍)
- 未知 | 420027次下载 | 免费
- 4OrCAD10.5下载OrCAD10.5中文版软件
- 0.00 MB | 234315次下载 | 免费
- 5Altium DXP2002下载入口
- 未知 | 233046次下载 | 免费
- 6电路仿真软件multisim 10.0免费下载
- 340992 | 191186次下载 | 免费
- 7十天学会AVR单片机与C语言视频教程 下载
- 158M | 183279次下载 | 免费
- 8proe5.0野火版下载(中文版免费下载)
- 未知 | 138040次下载 | 免费





 工商网监
工商网监
评论