了直升机的垂直升降的飞行性能,同时也在一定程度上降低了飞行器机械结构的设计难度。四轴飞行器的平衡控制系统由各类惯性传感器组成。在制作过程中,对整体机身的中心、对称性以及电机性能要求较低,这也正是制作四轴飞行器的优
2017-12-13 09:52:30 16376
16376 系统分成控制模块和执行模块。控制模块是一个遥控器,安芯一号作为主控芯片。按键来控制飞行器的运动,包括悬空,上升,下降,水平4个方向的运动。单片机直接与无线串口模块进行通信,把指令直接通过串口抛数据给
2013-11-03 23:25:05
无人机控制系统原理是什么?
2021-11-08 08:24:27
在无人机飞行控制系统中,飞行控制器是其核心部件,它负责飞行控制系统信号的采集、控制律的解算、飞机的姿态和速度,以及与地面设备的通讯等工作。随着无人机越来越广泛的应用,它所完成的任务也越来越复杂,对无人机的机动性要求也越来越高,这就要求无人机的控制核心向高集成度和小型化方向发展。
2019-10-22 07:58:23
深圳市拓天腾飞科技有限公司专业生产无人机、航模、多轴飞行器的电机,联系qq 239396310
2017-07-05 18:05:24
摘要:无人机(UAV)是无人驾驶飞机的简称,是指利用无线电遥控设备和自备的程序控制装置操纵的不载人飞行器。无人机最初诞生在一战时期,作为靶机使用。而经过几十年的发展,由于通信技术的飞速发展,无人
2021-07-21 08:03:24
控制系统。一个典型的无人机飞行器应包括以下基本组成部分:
1)有引擎的飞行器以完成一些基本的飞行功能 2)一个简单的航空电子系统实现自动飞行的控制系统。 这种系统应包括:
a)一个机载计算机系统,以收集
2023-09-20 06:25:18
飞行控制系统,自行下载
2016-08-17 12:03:33
领域中的使用快速增长,其市场需求日益兴盛,所以无人飞行器可实现的分支应用领域正不断增加,在人们的视线中也频繁起来了。 此时,拥有专业半导体行业经验的ADI按耐不住这广阔的前景,大步挺入无人飞行器的航空
2018-10-15 09:10:14
,作用是为飞行器提供足够的升力和推进力;(5)供电电池为整个飞行器提供电能,确保各个部分的正常工作;(6)传感器模块为飞行器提供姿态和高度等信息,是飞行器姿态控制系统的重要组成部分。由于本课题的研宄重点在于飞行器
2016-05-23 15:41:22
申请理由:在开发四涵道飞行器时,采用的STM32F4进行飞行控制算法编程,还没做过在嵌入式操作系统下的开发。知道致远电子的这个开发板免费申请活动,因此,想申请一块开发版,设计一个四涵道的飞行控制系统
2015-10-23 10:14:30
,并学习研究相关编程控制的实现。(2)主要任务是利用altium designer设计硬件控制系统,利用keil C编写改进相应的软件控制程序。(3)设计飞行器控制板1套,编写C代码5000余行,基本实现了飞行器各个传感器的功能。
2015-10-23 10:13:19
等6种基本运动状态,利用陀螺仪进行物体姿态检测,利用智能传感器技术和GPS全球卫星定位系统使飞行器在无人操控的情况下实现智能化自主导航、自动返航、地理围栏等功能。
2015-07-07 10:40:09
控制在工业控制领域应用广泛,原理简单、鲁棒性好、可靠性高,科技人员在长期的工程实践中积累了大量的控制系统设计经验,在四旋翼飞行器姿态控制中,PID控制技术成熟,易于实现。因此,本项目基于PID控制的四
2018-10-24 17:24:21
项目名称:无人机飞行控制系统设计试用计划:1.拿到产品,首先 对产品硬件进行了解,并撰写相关报告;2.配合自己的开发板对申请的开发套件进行配合使用,完成相关的例程实验,并撰写相应的使用心得;3.针对
2016-12-07 16:51:24
申请理由:之前一直在做控制方面的项目,智能车,智能家居等。现在和队友一起研究六轴智能飞行器项目描述:智能六轴飞行器能够实现空中智能悬停,俩架飞行器能够在空中实现智能相对静止飞行,无遥控操作。
2015-08-01 23:37:23
等6种基本运动状态,利用陀螺仪进行物体姿态检测,利用智能传感器技术和GPS全球卫星定位系统使飞行器在无人操控的情 况下实现智能化自主导航、自动返航、地理围栏等功能。
2015-08-04 16:08:39
,使其发展趋于无人机,智能机器人。四轴飞行器不但实现了直升机的垂直升降的飞行性能,同时也在一定程度上降低了飞行器机械结构的设计难度。四轴飞行器的平衡控制系统由各类惯性传感器组成。在制作过程中,对整体机身
2015-08-11 10:00:45
MICOKIt主板系统的控制下,四旋翼飞行器在飞行时能够更加稳定。同时我会把测试结果反馈给贵公司。项目描述:基于物联网的四旋翼飞行器,是以四旋翼飞行器为主体,其带有主控制芯片、传感器和信号发送模块等
2015-07-31 21:17:45
小型化,并融入了人工智能,使其发展趋于无人机,智能机器人。四轴飞行器不但实现了直升机的垂直升降的飞行性能,同时也在一定程度上降低了飞行器机械结构的设计难度。四轴飞行器的平衡控制系统由各类惯性传感器组成。在
2015-08-11 10:38:55
幸得到,我们也会大量在我们学校科协宣传贵公司的产品,实现互惠!谢谢!项目描述:项目名称 : 大学生创新实验, 基于四轴无人飞行器的环境侦查系统设计我们打算将该项目分为:四轴平台的搭建,语音控制四轴飞行器
2015-07-24 18:42:59
的单片机,我想那一定非常炫,如果单片机有了系统的话,我想对图像处理会更加流畅,快速。刚好我们和老师正在做基于四轴无人飞行器环境侦查系统,希望借此机会能好好探索下带系统的OK210,希望给我次机会。谢谢项目
2015-08-04 12:24:24
、监督、检查(如地雷探测)等任务,可以胜任需要冒险近地飞行或靠近其他物体的飞行任务,不像有人飞行器那样给飞行员安全带来威胁。当无人飞行器低速飞行或悬停于特定目标上空时,对于低成本的惯导系统(INS)或
2015-09-10 11:10:13
开发板,然而没有合适的板子,看到这款板子大家一致认为可以尝试用一下,特此申请项目描述:通过陀螺仪,采集无人机的姿态数据,计算控制量并输出到舵机等执行机构,接受地面站的指令并传输无人飞行器的位置等信息。利用设计的控制板进行伺服控制算法的实现,完成对执行机构舵机的控制
2015-09-10 11:18:57
项目名称:基于自主目标跟踪的无人机飞行控制系统试用计划:申请理由本人具有三年的嵌入式设计和开发的相关工程经验,曾自主完成了四旋翼飞行器的飞行控制系统的软硬件设计,并对计算机图像标定技术,图像识别
2019-07-03 10:47:45
,并融入了人工智能,使其发展趋于无人机,智能机器人。四轴飞行器不但实现了直升机的垂直升降的飞行性能,同时也在一定程度上降低了飞行器机械结构的设计难度。四轴飞行器的平衡控制系统由各类惯性传感器组成。在
2015-08-11 10:30:35
搭载了UCOS系统,在系统服务的基础上实现了飞行器和WIFI模块的互联,不仅实现了数据的传输,还方便了飞行器的控制。该项目主要有飞控模块和WIFI模块组成,且可以用手机的WIFI进行飞行器的控制。飞
2015-07-25 09:51:21
开发有人机飞控系统、自驾仪等; 3、负责开发无人机飞控系统/自驾仪以及地面站软件; 4、负责设计、开发及支持嵌入式飞行器控制系统应用软件设计、开发嵌入式安卓系统和软件,支持任务系统的集成。 任职要求
2016-06-01 10:07:46
申请理由:我们是在校大学生科研兴趣团队,正在设计制作四轴无人 项目。现在四轴无人机一般通过遥控器或者电脑上位机控制飞行。所以,我们希望通过申请蓝牙开发套件,用手机蓝牙控制四轴飞行器的运行,对飞行器
2015-10-09 14:16:12
调节器输出侧叠加一个恒定的调节量。大部分控制系统不需要调节微分时间。因为只有时间滞后的系统才需要附加这个参数。如果画蛇添足加上这个参数反而会使系统的控制受到影响。 四轴飞行器中的控制器 目前四轴飞行器
2019-07-14 05:00:00
四轴飞行器的结构是如何构成的?四轴飞行器的基本飞行原理是什么?一种基于四轴飞行器的双闭环PID控制算法
2021-05-19 06:20:42
一 任务及设计要求1.1任务模拟飞行器(如无人机、导弹等)在空中飞行过程中使用九轴加速度/陀螺仪/磁力计模块采集姿态信息;并且能使用摄像头模块采集图像信息实现目标检测功能,从而实现飞行器朝目标飞行
2021-08-09 06:15:54
四轴飞行器的发展背景;四轴飞行器的研究现状;四轴飞行器的研究意义;哪位大神知道的说下,想了解啊
2012-07-27 14:09:48
了一种数字式飞行控制系统的总体结构。飞行控制计算机是四旋翼飞行器自动驾驶仪的基本组成部件。采用模块化设计思想,设计开发一种基于PIC32 高性能单片机为核心的飞行控制计算机。四旋翼飞行器采用对称分布
2019-04-05 07:00:00
一号实验板控制四个螺旋桨直流电机旋转,当四个电机同向旋转时,飞行器平稳上升,当相邻两电机转向相反时,飞行器旋转,当前两个电机转速相同,后两个电机转速相同时,可实现飞行器前后飞行。用蓝牙模块遥控飞行器,用
2013-10-28 10:26:53
四旋翼的旋翼对称分布,4个旋翼处于同一高度水平面上,他们的结构和半径都相同。通过改变四个电机的转速就可以实现升力的变化,从而控制飞行器的姿态和位置。1)当四个电机同时加速或同时减速时,飞行器会垂直
2021-09-13 06:54:55
,十字模式意味着首尾的方向会指向某个螺旋桨,而X字模式则是指首尾方向指向两个螺旋桨中间。大多数飞行器采用的是X字模式。X字模式相对于十字模式来说,控制起来更加困难,但动作的灵活性会更高。图 1.1
2015-10-23 11:30:24
四旋翼飞行器控制模型为便于建立模型,现对四旋翼飞行器进行以下假设:1、四旋翼飞行器是均匀对称的刚体2、四旋翼飞行器的质量和转动惯量不发生改变3、四旋翼飞行器的几何中心与其重心重合4、四旋翼飞行器只受
2021-09-15 07:22:37
四旋翼微型飞行器是一种以4个电机作为动力装置.通过调节电机转速来控制飞行的欠驱动系统;为了实现四旋翼微型飞行器的自主飞行控制,对飞行控制系统进行了初步设计,并且以C8051F020单片机为计算控制
2013-11-28 09:29:12
不同,是通过调节四个电机转速来改变旋翼转速,实现升力的变化,从而控制飞行器的姿态和位置。由于飞行器是通过改变旋翼转速实现升力变化,这样会导致其动力不稳定,所以需要一种能够长期确保稳定的控制方法。四旋翼飞行器
2019-02-18 15:02:22
,要为控制系统提供必要的反馈,主要是运动目标与飞行器的位置偏差以及运动目标的移动速度;最后,需根据反馈对飞行器做出可靠的控制。为了实现对地面快速移动目标的实时追踪,飞行器的响应速度必须较快,当地面目标移动
2018-12-03 19:35:50
stm32做四轴飞行器难度很大吗
2017-03-20 22:13:59
上位机传给四轴飞行器一段航线四轴飞行器怎么按航线运动求类似代码最好有labview实现的航线规划
2014-05-21 20:45:12
`通过学习这个课程了解四周飞行器的原理,知其然并知其所以然。不光可以做四周飞行器还可以做智能家居系统、智能农业检测、智能物流仓储系统、安防监控系统、智能穿戴、智能机器人小车、无人机等项目。 一
2018-01-02 16:16:52
的数值平均滤波方式,减弱瞬时峰值电流对测量结果的影响。 4 结语 本文实现四轴飞行器的直流无刷电机的驱动电路和系统控制软件程序设计。驱动电路采用三相六臂全桥电路,MOSFET 作为开关元件,利用
2018-10-08 15:13:09
设备的介绍和开发5无人机开发和实践安装位置空间展示区周边应用lJoypad控制器l固定翼飞行器空间期望在观察和使用固定翼飞行器同时,了解它的结构原理、运动原理为基础,能在学习配套的指导文档后,能够总结并
2015-10-23 11:21:59
本人最近参加虚拟仪器大赛,用FPGA实现飞行器的控制,该怎么写?求大神指教!
2014-11-19 19:09:51
和对飞行器姿态的实时调整,从而达到稳定运行,本项目另一个亮点就是可通过无线通讯上位机对飞行器运行状态的实时监控。时间安排,分二个阶段:一个月内完成,前期pcb 板的设计和基于matlab 模型的运动仿真,后期整体电路的调试和基于SLH89F5162飞行控制系统的设计。
2013-10-17 10:11:09
北航多旋翼飞行器设计与控制详解
2019-07-11 07:30:00
四旋翼的工作原理是什么?四旋翼飞行器是由哪些部分组成的?如何去实现一种四旋翼飞行器的设计呢?
2021-11-11 08:01:28
四旋翼自主飞行器是由哪些模块组成的?如何去实现一种四旋翼自主飞行器的设计呢?
2021-11-12 06:20:09
四轴飞行器的硬件设计包括哪些呢?如何去实现一种四轴飞行器的硬件设计呢?
2021-12-20 07:23:57
、航空摄影,到安保、监测监控和通信,无人机的用途多种多样。然而,无人机开发商所面临的两个关键挑战——电池寿命和飞行时间仍然存在。为了帮助飞行器避开障碍物,无人机制造商在产品中增添了方向和感测等功能,不过,新增
2019-03-26 06:45:11
本文描述了一个简易四轴飞行器系统的设计实现,整个方案分为遥控控制板各飞行控制板两部分,通过2.4G无线模块进行控制通信,飞控系统采用IMU系统获取姿态信息根据反馈控制算法进行电机控制从而实现飞行控制
2021-03-04 06:03:00
复杂,不易操作等原因,四旋翼飞行器的发展一直都比较缓慢。直到20世纪90年代之后,随着微机电系统(MEMS)和微惯性(MIMU)以及飞行控制等技术研究的成熟,多旋翼飞行器的自动控制器出现了。只需等待速度...
2021-08-06 08:22:07
利用LabVIEW(或其他软件)实现地面控制站的人机接口程序;实现在线飞行状态监测、显示飞行数据和报警信息;实现地面站对无人机的控制接口,包括命令控制台、飞行参数显示、无人机飞行航迹显示,并能根据任务对航迹进行实时规划;还要能利用3D模型动态显示飞行器的情况
2013-05-12 22:14:13
的Pitch和Roll运动连带产生,因此可以通过4路控制信号实现无人机的6个自由度的控制。具体的飞行原理如下图所示:图(A)是飞行器的Roll运动示意图,通过将4号电机和2号电机分别加速、减速,使得
2019-08-06 17:12:20
四轴飞行器电源控制采用的什么机制?
2023-10-08 10:18:22
给大家分享一个我在电路城看到一个四轴飞行器的方案。 开源无人机设计资料。Crazepony项目旨在为大学生/航模爱好者/创客提供可二次开发的迷你四轴飞行器原型。 我们秉承开放, 合作, 分享的理念
2016-07-28 10:27:38
控制系统来解决。四旋翼飞行器采用四个旋翼作为飞行的直接动力源,旋翼对称分布在机体的前后、左右四个方向,四个旋翼处于同一高度平面,且四个旋翼的结构和半径都相同,旋翼1和旋翼3逆时针旋转,旋翼2和旋翼4
2016-08-06 15:19:13
深圳市大疆创新科技有限公司(简称DJI),成立于2006年,是全球领先的无人飞行器控制系统级无人机解决方案的研发和生产商,客户遍布全球40多个国家。通过持续的创新,大疆致力于为无人机工业、行业用户
2013-02-02 14:46:38
以AT91M55800A微控器为核心设计并实现了基于ARM 的新型无人机飞行控制器,详细给出了无人机飞行控制系统的设计原理和控制策略,介绍了基于/~C/OS-II实时操作系统的飞行控制软件
2009-07-07 14:48:27 194
194 本文设计了一个自举飞行器的微机控制系统。结合动力学模型,讨论了飞行速度和迎角对飞机高度的影响及飞行航向的控制,阐述了飞机
2009-09-14 08:42:5214 摘要:基于C8051F310单片机设计超小型无人飞行器舵机控制系统是一种成本低廉、实现容易的方法。文中介绍了舵机控制系统的实现原理并给出了该系统具体的软硬件设计,系统在飞
2010-07-16 11:49:01338 小型无人直升机具有悬停、侧飞、倒飞等独特的飞行特性,能够实现固定翼飞机所不能完成的飞行动作,在军事和民用方面都有很大的应用需求。飞行控制系统是小型无人直升机系
2010-10-27 16:44:14421 O 引 言 飞行器自毁系统是飞行器的重要组成部分,它具有非常重要的军事及民用价值。飞行器自毁系统主要是实现飞行器在非正常飞行状态时的可靠自毁。飞行器按
2010-07-28 17:10:031185 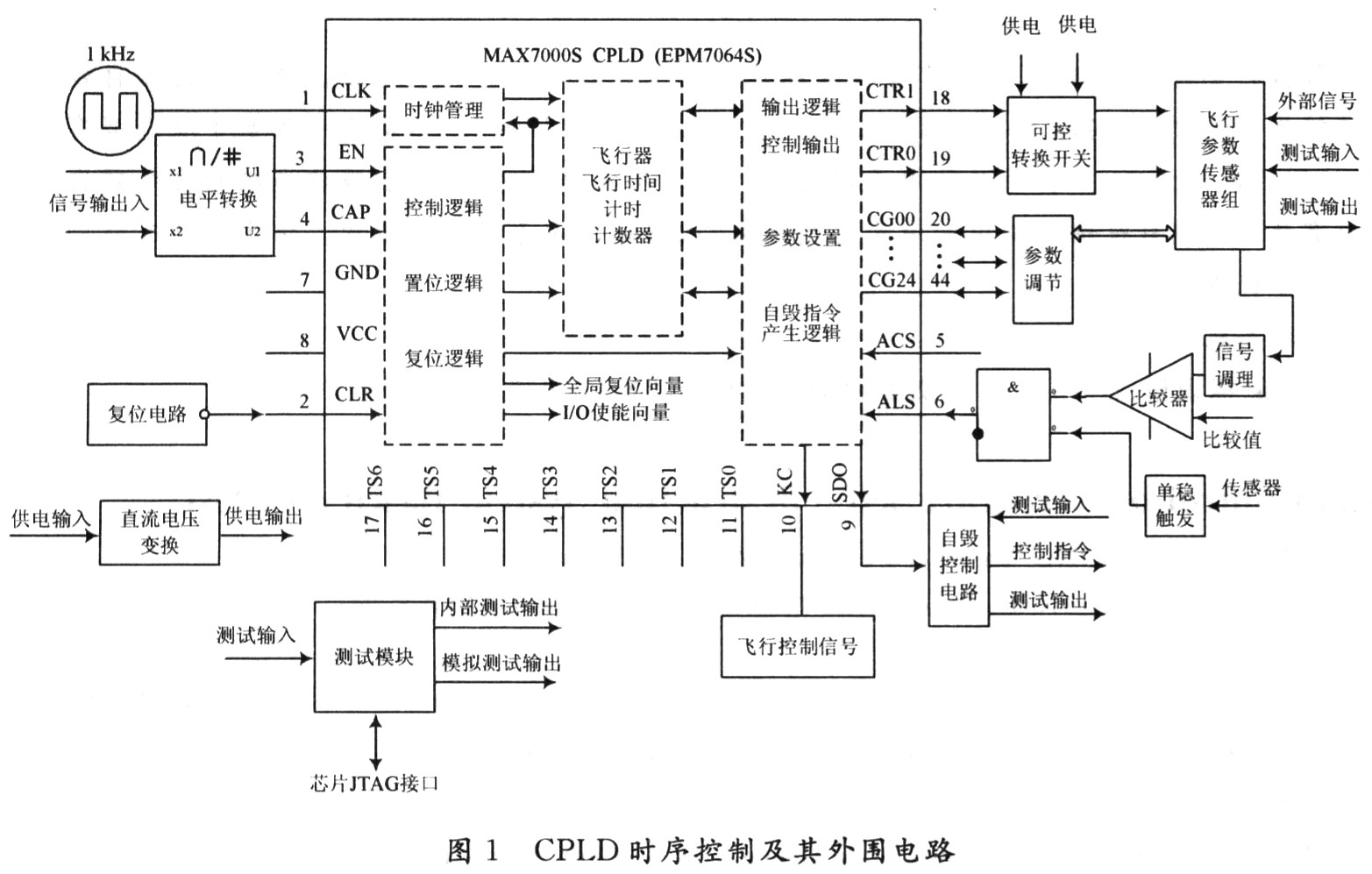
摘要:文章介绍了一种新型的基于高速数字信号处理器(DSP),以永磁同步电动机(PMSM)为驱动部件的飞行仿真转台控制系统的原理及构成,并介绍了控制系统的硬件和软件结构。给出了一些实验结果。 关键词:数字信号处理器(DSP) 伺服系统 永磁同步电动机
2011-02-27 15:38:0789 本文 围 绕 四桨碟形飞行器进行了初步的研究和设计。首先,介绍了目前国内外对碟形飞行器的发展状况和本课题的研究内容;其次对四桨碟形飞行器空气动力学从理论性上做了初步探讨
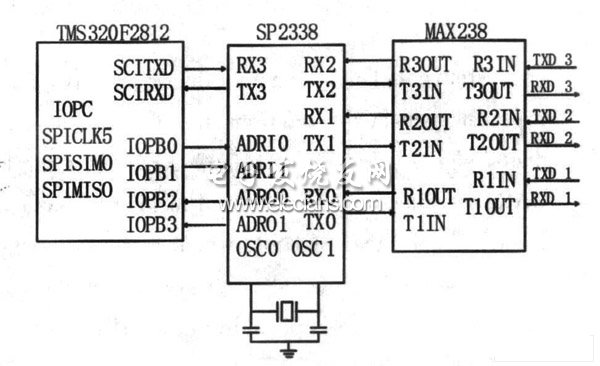
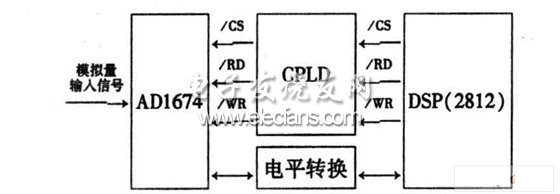
2011-12-06 17:36:270 研究一种基于TMS320F28335 DSP(Digital Signal Processor)的全数字飞行器控制系统的硬件设计,分析了其结构组成:主控制器电路、舵面位置检测电路和通讯等硬件电路设计。经过多次试验调试
2013-04-27 16:52:2268 An Application of 4-Rotor Unmanned Aerial Vehicle: Stabilization Using PID Controller四轴无人飞行器的应用——使用PID控制器实现稳定性
2015-11-30 10:48:3457 无人直升机飞行控制系统的设计与实现....
2016-01-06 11:41:1831 研究生论文,四轴飞行器,无人机,飞行控制器,嵌入式.
2016-03-21 11:47:4917 一篇关于微型四旋翼飞行器的设计技巧,简单介绍了四旋翼的功能实现以及飞行原理。
2016-03-29 14:20:0653 四轴飞行器控制原理,模型设计,控制,仿真。
2016-04-28 11:45:518 本文选择斜十字飞行器进行研究, 首先对飞行器建模条件进行了合理的假设,而后根据牛顿定律和欧拉方程,建立了一种斜十字四旋翼飞行器的动力学模型。 在此模型的基础上,设计了四旋翼飞行器的控制系统, 利用
2016-05-13 11:28:0524 滤波在飞行器姿态获取系统中的实现滤波在飞行器姿态获取系统中的实现滤波在飞行器姿态获取系统中的实现
2016-06-08 17:29:360 1-杭州电子科技大学_基于STM32F4的四轴飞行器控制系统_论文1-杭州电子科技大学_基于STM32F4的四轴飞行器控制系统_论文1-杭州电子科技大学_基于STM32F4的四轴飞行器控制系统_论文1-杭州电子科技大学_基于STM32F4的四轴飞行器控制系统_论文
2016-08-23 17:56:0041 基于SOPC的微型无人机飞行控制系统设计_宋宇
2017-03-19 19:12:421 随着航空、航天工业技术的迅速发展,对飞行器的研制成本和研发周期要求越来越高,这促进了飞行器仿真系统的研制和开发。飞行仿真转台是一个高精度的随动系统,由精密机械台体和高性能的控制系统两部分组成。 作为
2017-11-16 11:20:087 快递物流行业,四轴飞行器在这些行业中都有着不可忽视的应用,因此对飞行器的飞控系统提出了的更多样化功能要求。本课题根据当前军事和民用方面对四轴飞行器提出的功能要求以及常用飞控系统的特性,结合DSP与FPGA的优势,为
2018-02-01 15:06:233 通俗点说就是拥有四个独立动力旋翼的飞行器,四轴飞行器是多轴飞行器其中的一种,常见的多轴飞行器有两轴,三轴,四轴,六轴,八轴。
2018-03-28 09:39:0497771 本文基于四旋翼飞行器的工作原理和性能特点,设计了飞行器控制系统的硬件电路。系统包含微控制器模块、姿态测量模块、无线通讯模块、遥控器模块、电机驱动模块。系统能够为传感器参数测量、控制算法实现、无线通信等提供硬件平台,功耗低、可靠性高。
2018-05-24 16:37:0015161 
在四轴飞行器的飞控主板上,需要用到的芯片并不多。目前的玩具级飞行器还只是简单地在空中飞行或停留,只要能够接收到遥控器发送过来的指令,控制四个马达带动桨翼,基本上就可以实现飞行或悬停的功能
2018-06-20 14:45:0013385 本文档的主要内容详细介绍的是多旋翼无人机飞行器的入门学习资料和实践说明包括了:(1)无人飞行器概述 (2)多旋翼无人飞行器飞行控制系统 (3)多旋翼无人飞行器模拟训练 (4)多旋翼无人飞行器的安装调试
2019-11-04 08:00:0012 四旋翼无人飞行器具有复杂的数学模型,但现有控制方法大多是基于系统简化模型提出的。 为此,该文分析了这类方法的局限性,并基于原始数学模型研究了非线性轨迹跟踪控制问题。 通过期望轨迹建立跟踪误差模型
2019-11-18 08:00:000 对四旋翼飞行器悬停困难的问题,从外力平衡与外力矩平衡两点出发,根据牛顿一欧拉方程对悬停状态下的飞行器建立动力模型,利用PID控制理论进行回路控制,设计了四旋翼飞行器的悬停算法。现场飞行测试结果为飞行器在水平范围±2 m、垂直范围±l m的空间范围内漂移,实现了飞行器的悬停功能。
2020-04-14 08:00:006 无人机是一种有动力、可控制、能携带多种任务设备并能重复使用的无人驾驶飞行器。如今民用消费级无人机越来越受到人们的喜爱,市面上无人机品牌这么多看得头都痛了,不如自己做个飞行器。下面小编为您介绍六轴飞行器制作教程。
2020-05-13 11:02:582799 无人驾驶飞行器(更通俗地称为“无人机”)”——通过将无人驾驶飞行器引入航空公司,使莱特兄弟的载人飞行梦想变
2021-04-14 13:23:081697 文章介绍了一种新型的基于高速数字信号处理器(DSP),以永磁同步电动机(PMSM)为驱动部件的飞行仿真转台控制系统的原理及构成,并介绍了控制系统的硬件和软件结构,给出了一些实验结果。
2021-04-29 10:48:469 基于STM32单片机的四旋翼飞行器控制系统
2021-06-11 09:54:54119 飞行器燃料温度控制系统设计方案
2021-06-22 15:21:2319 多旋翼飞行器设计与控制的底层飞行控制
2021-09-14 09:36:140 全球领先的无人飞行器控制系统及无人机解决方案的研发和生产商选用GLPOLY无应力导热凝胶XK-G30;低密度双剂液态导热凝胶XK-S10LD,导热吸波凝胶XK-G20E;为什么全球最大的无人飞行器客户会如此青睐GLPOLY的导热材料呢?
2022-04-18 09:06:16670 在本教程中,我们将设计一个 X 形的四轴飞行器。两种形状都是稳定的,但在向前飞行中,四轴飞行器在向前飞行中需要偏航控制输入。两种配置的偏航控制权限相同,但在交叉配置的情况下,俯仰和横滚控制权限最多可增加约 30%。四轴飞行器依靠加速度计和陀螺仪等电子传感器和控制系统来稳定飞行。
2022-07-29 16:13:582353 
随着科技的发展以及军事战略思想的转变,无人飞行器在军事、民用领域具有广泛的应用前景和极其重要的现实意义。各国正在研制和开发各种性能独特的无人飞行器, 改造的核心就是飞行控制系统。
2023-06-19 16:31:46184 
随着科技的发展以及军事战略思想的转变,无人飞行器在军事、民用领域具有广泛的应用前景和极其重要的现实意义。各国正在研制和开发各种性能独特的无人飞行器, 改造的核心就是飞行控制系统。
2023-06-19 16:35:09682 
电子发烧友网站提供《单片机在超小型无人飞行器控制系统中的应用.pdf》资料免费下载
2023-10-12 10:41:290
 电子发烧友App
电子发烧友App









 工商网监
工商网监
评论