 哈佛大学开发了一种具有柔软触感的水下机器人抓手
哈佛大学开发了一种具有柔软触感的水下机器人抓手
据外媒报道,如果研究人员试图通过相机引导的遥控设备捕捉容易受伤的深海生物,他们肯定不会使用专为石油和采矿业设计的工具。正是考虑到这一点,哈佛大学领导的团队最近开发了一种具有柔软触感的水下机器人抓手。
该装置基于以前的研究,设计用于与远程操作水下航行器配合使用,该航行器由船上的操作员实时控制。抓手已经以各种形式进行了试验,其配备两到五个柔软的聚氨酯“手指”。这些“手指”在面对目标物体时可以使用低压液压系统打开和关闭 - 例如小而脆弱的动物 - 将海水泵入和排出。所有的“手指”都固定在一个中央木球上,而木球则由远程操作水下航行器现有的钢制钳子固定。
由于“手指”是3D打印的,因此可以根据需要在远程定位的研究船上制造专为特殊任务设计的新“手指”。该技术最近在南太平洋菲尼克斯群岛的一次探险中进行了测试。在那里,不同版本的远程操作水下航行器安装式抓手用于无害地拾取和检查生物,包括海参、珊瑚和海绵动物,深度达2224米。
根据操作员的反馈,科学家们3D打印并在“手指”上添加了额外的功能 - 这些包括楔形柔软的“指甲”,使“手指”更容易在物体下方滑动,同时还有沿着侧面边缘的延伸部分。“手指”形成了阻止动物在它们之间滑动的障碍。
“当与容易受伤的水下生物相互作用时,最适合的采样设备也最好是柔软的,”该研究论文的共同作者Rob Wood博士表示。“直到最近,软体机器人技术领域才进一步发展,使我们能够真正建造能可靠无害地抓住这些动物的机器人。”
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
3D打印
+关注
关注
26文章
3475浏览量
107657 -
软体机器人
+关注
关注
1文章
109浏览量
11491
原文标题:软体机器人抓手可以处理容易受伤的海洋生物
文章出处:【微信号:tjrobot,微信公众号:天津机器人】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
新技术让水下机器人拥有“触觉”
科研小组巧妙运用了磁弹性效应,结合人造皮肤这种柔软防水材质,完成了触感刺激到电磁场变化,再到电信号的转化流程,使得机器人得以实现触觉感知。
LabVIEW的六轴工业机器人运动控制系统
LabVIEW开发六轴工业机器人运动控制系统
本项目开发了一个高效的工业机器人控制系统,重点关注于运动学算法和轨迹规划算法的实现和测试。La
发表于 12-21 20:03
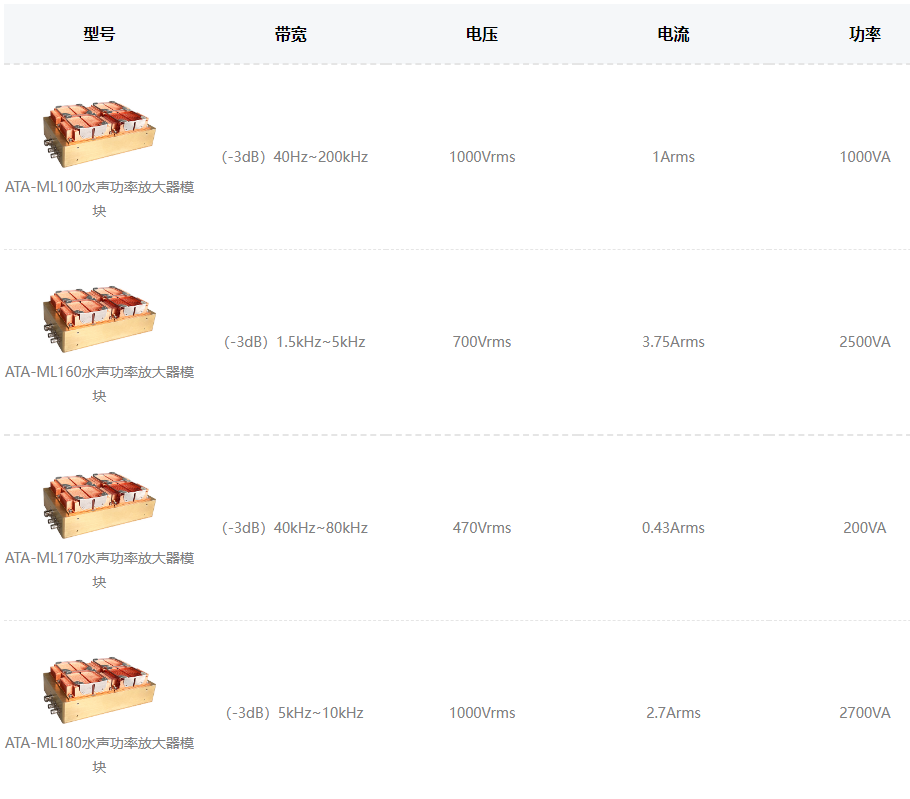
功率放大器模块在水下机器人中的应用有哪些
功率放大器模块是一种电子设备,它可以将输入信号的功率转换为输出信号的功率。在水下机器人中,功率放大器可以起到驱动电机、传感器等负载的作用,是实现水下机器人功能的重要组成部分之一。下面将详细介绍
机器人末端抓手的工作原理及结构设计
在当前的机器人研究中,末端抓手是机器人应用广泛的部件之一。机器人末端抓手的主要作用是进行物体的抓取、搬运和放置等任务。它


鳍源水下机器人为5G+海洋牧场带来科技助力!
近些年随着技术发展,我国智慧海洋建设飞速发展,目前正推动海洋传统行业数字化、绿色化、智能化新升级。鳍源科技引领时代发展,与华为、中国移动等伙伴携手,将AI智能水下机器人与5G网络相结合,推出全新
水下机器人的设计与实现
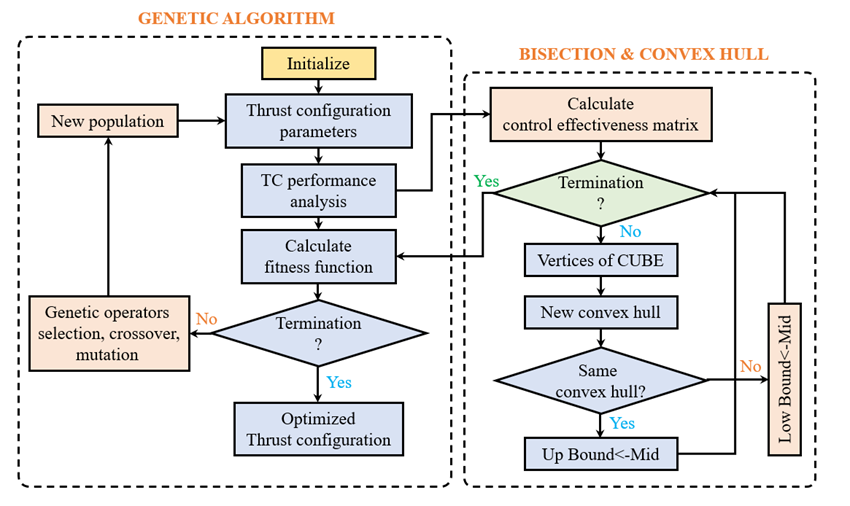
这个“长着三个触角”的水下机器人看上去是不是很萌?它使用的是一种新型的由三个球形磁耦合矢量推进器组成的推进系统。与传统的水下机器人使用多个固定推进器来实现多自由度(DOF)推进相比,矢量推进器
发表于 08-24 11:21
•1112次阅读
用于水下机器人的抗疲劳导电聚合物水凝胶应变传感器
传感新品 【江西科技师范、南方科技大学:用于水下机器人的抗疲劳导电聚合物水凝胶应变传感器】 近年来,高灵敏度柔性应变传感器因其在软体机器人、医疗保健、智能可穿戴设备等领域的巨大前景而引起了极大的关注


知名大学开发出可与光芯片无缝集成的光隔离器
近日,哈佛大学约翰·保尔森工程与应用科学学院(SEAS)的一组研究人员开发了一种方法,他们打造了一个高效的集成隔离器
机器人末端抓手的结构及工作原理
在当前的机器人研究中,末端抓手是机器人应用广泛的部件之一。机器人末端抓手的主要作用是进行物体的抓取、搬运和放置等任务。它
某水下机器人供电系统干扰改善方案浅析
下面分享某水下机器人供电干扰改善案例,从外围电路中关键的接地部分出发,简单分析故障干扰成因,简化干扰传播路径模型并提出相应的改善方案。
浅谈儿童陪护机器人
具有高效、稳定的特点,在儿童陪护机器人领域也得到了广泛应用。
对于儿童陪护机器人的设计者来说,TB6560AHQ是一种高性能、低噪音的双路步进电机驱动器芯片。其主要特点包括内置双路H桥
发表于 05-11 15:12





 工商网监
工商网监
评论