 深度解读扫地机器人SLAM技术
深度解读扫地机器人SLAM技术
如今扫地机器人越来越受欢迎,已经成为一类“新兴小家电”。为了效率更高、更节能地实现清扫全屋的功能,绘制室内地图以及确定自身位置是必不可少的功能,许多早期扫地机器人产品并没有配备导航系统,只能按照设定的路线进行清扫,碰到墙壁或物体边缘便转向,导致清扫线路杂乱无章、效率低下。近年来不少中高端扫地机器人都配备了导航系统,可以为室内区域建图或建模,以此来规划清扫路线,既节能又可以提高效率。目前市场上使用较为广泛的导航技术有两种,一种是视觉导航,另一种是激光导航。
两者都是通过SLAM(同步定位与建图)算法实现,SLAM是指运动物体根据传感器的信息,一边计算自身位置,一边构建环境地图或模型的过程,解决机器人等在未知环境下运动时的定位与地图构建问题。而根据传感器不同又分为基于视觉的VSLAM(Visual SLAM)和基于激光雷达的激光SLAM(Lidar SLAM),分别对应视觉导航和激光导航。
一、视觉导航
传统意义上实现视觉导航的VSLAM主要通过两种视觉传感器来获取信息,一是深度摄像头,通过测距实现三维空间感知,也算作一种测距传感器,属于主动光源测距传感器,包括结构光和相位TOF两种。二是双目、多目、鱼眼导航传感器,属于非主动光源传感器,工作机制类似于人眼,根据三角测距的原理,通过分析两个传感器采集到的图像的差异,计算出距离信息。
视觉导航技术的优势在于成本较低,最基础的功能仅需要可以采集到清晰环境图像信息的摄像头,以及处理信息的计算单元,搭载训练完成的AI模型,即可实现。较低的物料成本意味着较低的产品价格,更易被消费者接受,用户数量增加便可以不断训练AI模型,形成良性循环。以及双目导航传感器等非主动光源测传感器是通过接受环境光计算距离,理论上可以建图的区域更大。
▲视觉导航示意图
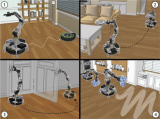
视觉导航技术的弊端也同样突出,毕竟硬件条件过于薄弱,正是由于仅靠摄像头来采集信息,主动光源测距传感器由于功率较低,很容易受到环境光的干扰,而非主动光源测距传感器在光线条件不好的情况下几乎无法工作,对光线的要求很高;其次,非主动光源测距传感器和人眼一样,距离越大,误差越大,同时过多的光线数据也让处理单元难以负荷。加之VSLAM研究起步较晚,所以目前应用相对较少,同时也要配合陀螺仪等传感器共同工作,主要为惯性导航,单个摄像头的作用仅为纠偏,如科沃斯DJ65扫地机器人,采用视觉导航,同时辅助导航和定位的传感器还有罗盘传感器、陀螺仪、跌落传感器、里程计等。
▲科沃斯DJ65扫地机器人
二、激光导航
起步更早的激光导航技术的基本原理相对简单,其一即为激光测距,激光测距就是朝向特定方向发射一束光线,光线遇到物体反弹回来被接收器捕获,已知光速,通过时间便可以计算出自身与物体之间的距离。区别在于,激光测距只需要发射一次接受一次,而激光导航技术高一个维度,通过向各个方向更多点位测距,可以二维地建图或三维地建模,同时确定扫地机器人自身的位置;其二则为利用两点间的距离信息进行三角测距。
▲激光导航示意图
通过上述的讲解,我们知道了实现激光导航技术需要的硬件有可以同时向多个点位多个方向测距的激光收发器,一般称为激光雷达测距传感器。由于其原理较为简单,早在05年便已比较成熟,是目前最稳定、最主流的定位导航方法。现在市场上有不少产品采用LDS激光导航算法,比如石头扫地机器人T6和米家扫拖一体机器人等,这类产品搭载的被称为LDS激光雷达测距传感器,另外就是处理距离信息和建模的处理单元。
▲激光导航示意图
由于原理更简单,涉及计算量也不至于短时间内让处理单元难以负载,并且在同一环境下得到的数据更加精确,所以使用激光导航技术的扫地机器人往往可以更精准地绘制二维地图或三维模型,配合“悬崖传感器”等还可以应对各种地形,防止扫地机器人从较高处如台阶跌落。当然,性能更加优异的激光导航技术所需的硬件成本也更高,以及激光雷达测距传感器损坏时维修成本也更高。
▲石头扫地机器人T6
三、孰胜一筹
了解完两者的工作原理以及优势劣势,那么视觉导航和激光导航哪种技术更好,更加适合家用扫地机器人市场呢?其实只是代表了两种方向和思路。
视觉导航技术的最大硬伤在于现阶段建图建模不够精确,使用体验并不尽如人意,一些采用视觉导航技术的扫地机器人产品测距不准,不过搭配其他传感器一起使用可以在较大程度上补足短板,可用性还是可以得到保障,另外比较低的价格也更容易被消费者接受;反观建图建模精度更高的激光导航技术,虽然现阶段激光导航测距传感器成本仍较高,但更加稳定技术更加成熟,各家厂商必定会研制性价比更高的传感器,降低硬件成本,让消费者以较低的价格,也可以享受到效果更好的扫地机器人产品。
我们认为,两种技术各有千秋,现阶段市场中各占有一定的份额,主要还是看哪种技术适合特定的消费人群。如果激光导航测距传感器的价格可以大幅度降度,那么精度更高、体验更好的激光导航技术更有可能主导扫地机器人市场的未来;当然,在近距离、光照较好的应用场景下,视觉导航的优势更大,仍会保有一席之地。
责任编辑:wv
-
SLAM
+关注
关注
22文章
390浏览量
31590 -
扫地机器人
+关注
关注
20文章
741浏览量
52171
发布评论请先 登录
相关推荐
视觉、激光、结构光?扫地机器人导航避障技术盘点
扫地机器人的工作原理和应用芯片

扫地机器人加装了六轴机械臂!

高精准材质识别:支撑扫地机器人自适应清扫技术

科沃斯最新款扫地机器人搭载地平线旭日3芯片上市
关于扫地机器人的测试方法

智能扫地机器人是如何准确清扫全屋的?
扫地机器人停滞不前的原因是什么
我们拆了一款Tof+AI避障的扫地机
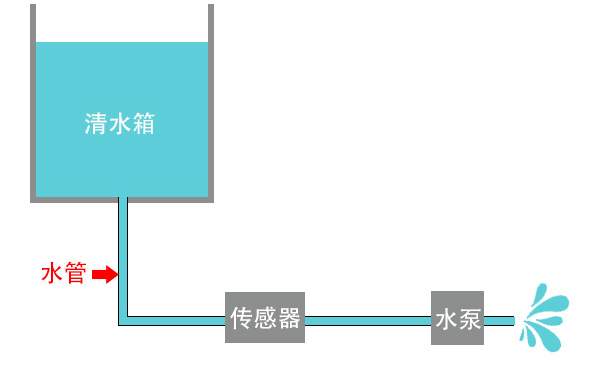
扫地机器人液位检测方案





 工商网监
工商网监
评论