机器人
盘点KUKA工业机器人案例分析,应用至上!
目前在国际机器人行业,四大家族的品牌影响力是雷打不动的地位,有可能的变化就是这四大家族的前后顺序发生一些变换而已。但是,就是四大机器人家族,也在不断地加大研发力度,提升产品的智能化和自动化水平,巩固或扩大企业的市场地位。现在小编就向大家介绍一下当前最火的机器人企业之一——KUKA。
“四大家族”之KUKA工业机器人应用案例分析
kuka机器人当前最具市场主导地位的行业是汽车制造,除此之外,它在农业机械、电梯、PC、工程机械、轨道交通等等众多领域也具有非常强大的智能解决能力。不信,小编下面就重点为大家介绍几种KUKA机器人的智能化焊接解决方案,供各位看官品读。
机器人要走入智能家居还需突破什么?
“智能家居”这个概念已经存在多年了,此前,在亚马逊Echo意外走红,横扫美国市场的时候,这个概念再一次被人们所关注。此后,国外的谷歌、苹果,国内的阿里巴巴、小米等等竞相开始研究智能家居。路由器、冰箱、台灯……一系列的智能家居用品被生产出来,除了这些传统家电设备,我们也看到了一些另类的智能家居用品,比如说可呆萌、可傲娇的机器人。
自动驾驶那么火 丰田为什么押注机器人?
丰田方面表示,随着人口老龄化程度的加剧,预计未来全世界老龄化人口总数将达到 6 亿,所以人们对于机器人的需求必然会超过自动驾驶汽车的需求。
ABB、新松等七大企业的人机协作机器人技术
人机协作机器人是一种新型的机器人,它能够直接和人类一起并肩工作而无需使用安全围栏进行隔离。人机协作机器人有望填补全手动装配生产线与全自动生产线之间的差距。
如何有效提高机器人伺服电机的过载能力?
说起对工业机器人的性能要求,无非就是“快、准、狠”三字。其实这也就是对机器人关节伺服电机的要求,今天我们就来拆解一下这三字背后的含义。
10款功能各异的教育类机器人
机器人在科幻电影中往往是杀人机器、外星侵略者,我们也不能排除未来的人工智能真的会进化成“终结者”,但现在,机器人往往意味着某种具有专业功能的机械产物(如货架、烹饪机械手臂)、当然也有一些人形机器人,应用在礼仪接待和科学研究方面。可以肯定的是,人们一直在不断研发、完善机器人,最终打造成真正的人工智能。近日于美国纽约市举办的RoboUniverse展上,各色的机器人已经让我们看到了未来。
工业机器人在工厂自动化领域解决方案
机器人问世已有几十年,机器人的定义仍然仁者见仁,智者见智,没有一个统一的意见。原因之一是机器人还在发展,新的机型,新的功能不断涌现。也许正是由于机器人定义的模糊,才给了人们充分的想象和创造空间。
热门类型机器人设计方案合集
机器人问世已有几十年,机器人的定义仍然仁者见仁,智者见智,没有一个统一的意见。原因之一是机器人还在发展,新的机型,新的功能不断涌现。
基于tms320vc5416和图像传感器0v7620的足球机...
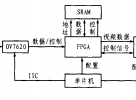
足球机器人嵌人式视觉系统方案给出了用cmos图像传感器 0v7620、SRAM帧存储器 IS61LV25616、CPLD/FPGA控制器 EPF10K10LC84—3以及 DSP器件 tms320vc5416设计的新型嵌入式图像采样处理系统的设计方案。充分发挥了FPGA的快速并行处理能力,同时利用了DSP强大灵活的数值运算能力。
2016-09-26 标签:图像传感器足球机器人tms320vc54160v7620 2147
无人机、机器人RC 2S1P电池管理解决方案
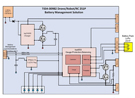
TIDA-00982 参考设计是一款用于 2S1P 电池管理解决方案 (BMS) 的子系统设计,适用于无人机、机器人或无线电控制 (RC) 的项目和设计。
NXP低功耗蓝牙控制的机器人参考设计
Bluetooth® Low Energy (BLE)控制的机器人参考设计采用FRDM-KW40板和Pololu Zumo机器人开发,并且可以通过手机APP控制。
基于模糊行为和神经网络的机器人视觉伺服控制方案
一种新的机器人视觉伺服控制方法,该方法参照人的抓取动作,首先根据物体在图像中的位置信息,利用模糊逻辑将机器人的手爪移动到物体附近,然后再根据物体当前图像和参考图像之差,利用局部神经网络对手爪的位姿进行精确调整。整个过程无需机器人和摄像机的标定,能有效利用人的控制经验.
机器视觉原理解析及典型解决方案
机器视觉系统的特点是提高生产的柔性和自动化程度。在一些不适合于人工作业的危险工作环境或人工视觉难以满足要求的场合,常用机器视觉来替代人工视觉;同时在大批量工业生产过程中,用人工视觉检查产品质量效率低且精度不高,用机器视觉检测方法可以大大提高生产效率和生产的自动化程度。
基于ADT850的机器人运动控制系统设计方案
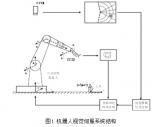
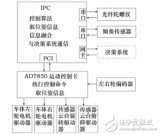
ADT850运动控制卡及相关传感器组成;操作系统采用Windows98系统,采用VisualC++6.0开发,并应用模块化及Windows线程的多任务处理机制实现控制程序设计;根据状态反馈控制理论,设计了移动机器人路径跟踪控制算法。
基于模糊神经网络的机器人位置控制系统设计
本文将模糊控制与神经网络相结合,设计一种基于模糊神经网络的机器人位置控制系统,并将其运用到机器人轨迹跟踪控制系统中,本系统中,立体定位系统作为主要数据输入通道,用于精确获取目标位置与机器人之间精确的相对位置。随后将这些现场实时空间信息融入先前建立的空间模型。















编辑推荐厂商产品技术软件/工具OS/语言教程专题
| 电机控制 | DSP | 氮化镓 | 功率放大器 | ChatGPT | 自动驾驶 | TI | 瑞萨电子 |
| BLDC | PLC | 碳化硅 | 二极管 | OpenAI | 元宇宙 | 安森美 | ADI |
| 无刷电机 | FOC | IGBT | 逆变器 | 文心一言 | 5G | 英飞凌 | 罗姆 |
| 直流电机 | PID | MOSFET | 传感器 | 人工智能 | 物联网 | NXP | 赛灵思 |
| 步进电机 | SPWM | 充电桩 | IPM | 机器视觉 | 无人机 | 三菱电机 | ST |
| 伺服电机 | SVPWM | 光伏发电 | UPS | AR | 智能电网 | 国民技术 | Microchip |
| 开关电源 | 步进电机 | 无线充电 | LabVIEW | EMC | PLC | OLED | 单片机 |
| 5G | m2m | DSP | MCU | ASIC | CPU | ROM | DRAM |
| NB-IoT | LoRa | Zigbee | NFC | 蓝牙 | RFID | Wi-Fi | SIGFOX |
| Type-C | USB | 以太网 | 仿真器 | RISC | RAM | 寄存器 | GPU |
| 语音识别 | 万用表 | CPLD | 耦合 | 电路仿真 | 电容滤波 | 保护电路 | 看门狗 |
| CAN | CSI | DSI | DVI | Ethernet | HDMI | I2C | RS-485 |
| SDI | nas | DMA | HomeKit | 阈值电压 | UART | 机器学习 | TensorFlow |
| Arduino | BeagleBone | 树莓派 | STM32 | MSP430 | EFM32 | ARM mbed | EDA |
| 示波器 | LPC | imx8 | PSoC | Altium Designer | Allegro | Mentor | Pads |
| OrCAD | Cadence | AutoCAD | 华秋DFM | Keil | MATLAB | MPLAB | Quartus |
| C++ | Java | Python | JavaScript | node.js | RISC-V | verilog | Tensorflow |
| Android | iOS | linux | RTOS | FreeRTOS | LiteOS | RT-THread | uCOS |
| DuerOS | Brillo | Windows11 | HarmonyOS |





 工商网监
工商网监