实时语音识别系统中,由于语音的数据量大,运算复杂,对处理器性能提出了很高的要求,适于采用高速DSP实现。虽然DSP提供了高速和灵活的硬件设计,但是在实时处理系统中,还需结
2011-10-03 11:10:53 1895
1895 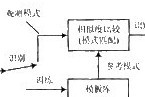
本汉语语音识别系统是一个非特定人的、孤立音语音识别系统。其中孤立音至少包括汉语的400多个调音节(不考虑声调)以及一些常用的词组。##测度估计技术可以采用动态时间弯折DTW、隐马尔可夫模型HMM
2014-12-16 13:44:373123 
文中阐述的是家庭监护机器人项目中语音识别系统设计的部分,通过DSP、DMA和ARM Cortex-A8的并行处理,利用双缓冲的方法,在嵌入式Linux上实现了基于ATK的实时语音识别系统
2014-12-16 14:14:432752 监护机器人项目中语音识别系统设计的部分,通过DSP、 DMA和ARM Cortex-A8的并行处理,利用双缓冲的方法,在嵌入式Linux上实现了基于ATK的实时语音识别系统。##本文
2014-12-19 13:50:5417721 开发基于自然语言的语音识别系统面临许多技术挑战,包括使用精确的语音识别引擎将机器听到的内容翻译成文字—以及一个综合的自然语言处理器
2015-10-20 09:31:103998 `报名链接:http://t.elecfans.com/live/563.html直播主题及亮点本次直播讲解AI语音识别核心技术知识以及语音识别系统架构,现场实操写代码实现语音采集、语音传输与解析
2018-09-19 13:40:42
语音识别技术的最重大突破是隐含马尔科夫模型Hidden Markov Model的应用。从Baum提出相关数学推理,经过Labiner等人的研究,卡内基梅隆大学的李开复最终实现了第一个基于隐马尔科夫模型的大词汇量语音识别系统Sphinx。此后严格来说语音识别技术并没有脱离HMM框架。
2019-10-08 14:29:52
语音识别系统在智能家庭系统中的应用是什么?
2021-05-31 06:54:34
FPGA和Nios_软核的语音识别系统的研究引言语音识别的过程是一个模式匹配的过程 在这个过程中,首先根据说话人的语音特点建立语音模型,对输入的语音信号进行分析,并提取所需的语音特征,在此基础上建立
2012-08-11 11:47:15
开发并测试了安装在汽车内、使用简单离散字的特定发音人语音识别系统。
2019-11-04 07:23:41
基于ARM的嵌入式指纹识别系统 65页 1.0M
2016-09-27 08:45:30
基于ARM的嵌入式指纹识别系统 65页 1.0M
2016-09-29 08:49:22
量大,一般在计算机上实现,即使是嵌入式方面,多数方案也需要运算能力强的ARM或DSP,并且外扩RAM、FLASH等资源,增加了硬件成本,这些特点无疑限制了语音识别技术的应用,尤其是嵌入式领域。本系统
2014-03-17 13:31:40
基于AVR单片机的语音识别系统设计,系统以AVR单片机为控制核心,实现对人的语音的识别控制。系统采用的主控芯片为Atreel公司的ATMEGAl28,语音识别功能采用ICR oute公司的单芯片
2021-01-13 15:54:14
基于DSP的汉字语音识别系统如何实现
2021-03-12 06:33:15
基于FPGA的车辆牌照识别系统的设计介绍了一种以FPGA 芯片为核心,基于SoPC技术实现的车辆牌照识别系统。系统通过CCD摄像头完成含车牌图像的采集,经过系统的存储、处理来实现车牌识别的目的。系统具有良好的便携性、灵活性和通用性。详细的论述了该系统硬件结构和软件设计思想,并分析了系统具有的优点。
2012-08-11 15:35:45
基于HMM的语音识别系统是怎么训练的?有哪些步骤?
2021-12-23 06:16:50
基于LabVIEW的语音识别系统
2020-03-07 16:41:15
请大家帮帮忙,基于LabVIEW的语音识别系统,要求先录几个人的声音做样板,然后再让其中一个人说话,能辨别出是谁说的
2013-05-16 11:16:15
又没人做过基于LabVIEW的车牌识别系统或类似的?
2013-06-11 15:32:45
语音识别是机器通过识别和理解过程把人类的语音信号转变为相应文本或命令的技术,其根本目的是研究出一种具有听觉功能的机器。本设计研究孤立词语音识别系统及其在STM32嵌入式平台上的实现。识别流程是:预
2021-08-06 08:32:00
处理过程基本上是一致的。目前主流的语音识别技术是基于统计模式识别的基本理论。一个完整的语音识别系统可大致分为三部分:(1)语音特征提取:其目的是从语音波形中提取出随时间变化的语音特征序列。(2)声学模型
2019-03-10 22:00:15
labview,基于声卡的声音识别系统。有木有大神做过这个?新手求教
2016-06-06 19:12:32
特定人语音识别的方法有哪些?特定人语音识别系统是由哪些部分组成的?如何去实现一种特定人语音识别系统?
2021-05-19 06:44:14
如何去设计电子标签识别系统的硬件部分?如何去设计电子标签识别系统的软件部分?
2021-05-21 06:49:35
现在社会发展的这么快,什么高科技都涌现出来,什么智能机器人啦,智能手机等,有很多在这里就不一一列举了,在这里我们要说的就是语音识别系统了,现在嵌入式产品如此的多,就像一些智能空调啦,我们可以对着他说
2021-12-20 07:52:03
嵌入式语音识别系统是什么?嵌入式语音识别系统在生活中的应用有哪些呢?
2021-12-23 08:27:03
导读:微软今天宣布,其会话语音识别系统的误率达到了5.1%,是目前为止最低的。
[img][/img]
这一数据超过了微软人工智能和研究团队去年5.9%的误差率,并将其准确性与专业的人
2017-08-23 09:18:35
一个完整的牌照识别系统包括哪些单元?怎么实现基于MATLAB的车牌识别系统的设计?
2021-05-12 07:04:46
怎么实现小型无线射频识别系统的设计?
2021-05-19 07:03:16
随着计算机技术和信息技术的迅速发展,语音口令识别已经成为了人机交互的一个重要方式之一。语音口令识别系统将根据人发出的声音、音节或短语给出响应,如通过语音口令控制一些执行机构、控制家用电器的运行或做出
2019-09-03 08:27:23
(GMM+HMM+NGRAM)概述)。一段时间后老板就布置了具体任务:在我们公司自己的ARM芯片上基于kaldi搭建一个在线语音识别系统,三个人花三个月左右的时间完成。由于我们都是语音识别领域的小白,要求...
2021-07-29 08:59:19
怎样去搭建一个基于kaldi的嵌入式语音识别系统呢?
2021-12-23 09:30:05
怎样去搭建一个基于kaldi的嵌入式在线语音识别系统?分为哪几个阶段呢?
2021-10-28 08:37:01
怎样去搭建一种基于嵌入式平台的在线语音识别系统呢?有哪些阶段?
2021-12-23 06:51:31
LD3320语音识别芯片的工作原理是什么?LD3320语音识别芯片有何应用?怎样去设计一种基于LD3320芯片的嵌入式语音识别系统呢?
2021-12-23 09:50:11
摘要:语音交互系统是比较人性化的人机操作界面,它需要语音识别系统的支持。LD3320就是这样一款语音识别芯片。介绍了该芯片的工作原理及应用,给出了LD3320与微处理器的硬件接口电路及软件程序。随着
2021-07-21 09:31:27
该设计运用三星公司的S3C2440,结合ICRoute公司的高性能语音识别芯片LD3320,进行了语音识别系统的硬件和软件设计。在嵌入式Linux操作系统下,运用多进程机制完成了对语音识别芯片
2021-11-04 09:03:09
语音识别是什么?怎样去设计并制作出基于STM32的孤立词语音识别系统呢?
2021-11-08 07:04:19
音乐语音识别系统的硬件电路该如何去设计?音乐语音识别系统的软件该如何去实现?
2021-12-23 08:50:56
`汽车VIN码识别系统是一款VIN码识别、采集、解析SDK,可集成在安卓、IOS平台。汽车VIN码识别系统•高效——视频流识别、一秒钟采集VIN码,识别率高达99%;汽车VIN码识别系统•便捷
2019-06-28 13:40:19
疯壳AI语音及人脸识别系统开发文档教程pdf
2019-02-25 19:56:19
`报名链接:http://t.elecfans.com/live/563.html直播主题及亮点本次直播讲解AI语音识别核心技术知识以及语音识别系统架构,现场实操写代码实现语音采集、语音传输与解析
2018-09-19 13:46:18
最为实用、应用最为广泛的生物识别技术,尤其在民用生物识别技术中。 传统的指纹识别系统都是基于PC机的,这种系统具有识别速度快、样本存储量大、软件设计技术成熟等优点。但是,基于PC机的指纹识别系统...
2021-11-09 06:02:05
构架的 Arduino 开发板 Intel Galileo开源资料)。接下来介绍的是基于Arduino的智能家居语音识别系统设计。设计思路起源:晚上回到家,家里黑漆漆一片,得找到开灯的按钮才算完事
2016-07-29 09:58:06
系统采用凌阳SPCE061A 单片机作为语音识别系统的主控芯片。通过硬件电路设计和软件代码部分成功的设计并实现了一种具有语音识别功能、语音提示(语音合成)及语音回放(语音编
2009-05-26 10:54:08 45
45 语音识别技术是语音处理领域的一个关键技术。在研究了语音识别技术原理的基础上,本文提出了一种基于ARM 处理器的孤立词语音识别系统的设计方案,包括系统硬件设计、软件
2009-09-03 10:52:4977 本文提出了基于TMS320VC5402的语音识别系统方案。整个系统以TMS320VC5402为核心电路进行设计,由TLC320AD50C进行A/D转换,由TMS320VC5402识别语音信号,然后和机器人通信,并由AT89S52控制 LCD
2010-07-27 17:36:5625 孤立词语音识别系统的DSP实现
0 引 言 在孤立词语音识别中,最为简单有效的方法是采用动态时间规整(Dynamic Time Warping,DTW)算法,该算法解决了发音长
2009-11-10 09:25:37934 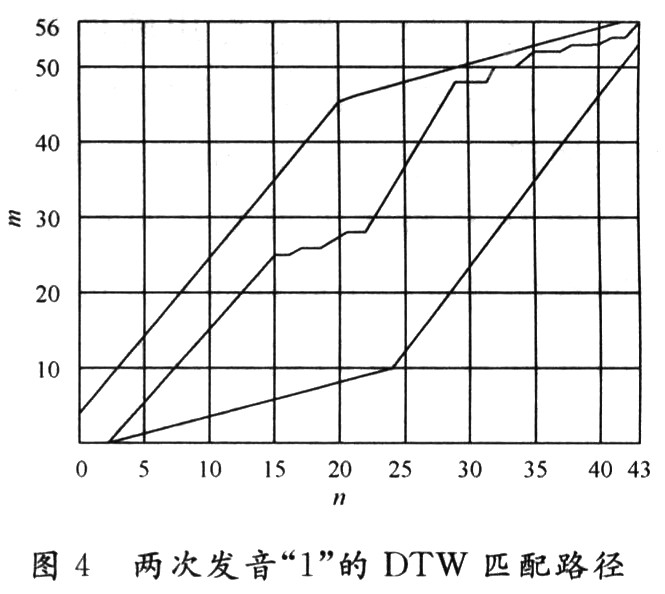
为了实现大词汇量连续语音识别技术的实际应用,本文提出了交互式语音识别的概念并着重研究其中的各项关键技术。所谓的交互式语音识别,是指为语音识别系统配置一位操作员,该
2011-05-28 16:30:2694 采用ARMS3C2410微处理器作为主控制模块,采用UDA1314TS音频处理芯片作为语音识别模块,利用HMM声学模型及Viterbi算法进行模式训练和识别,设计了一种连续的、小词量的语音识别系统
2011-07-12 11:34:582900 
文中对该系统的软硬件进行了设计。在硬件方面,给出语音识别系统的硬件组成原理,并提供了关键部分原理图;在软件方面,提出实时语音识别的方法,给出应用程序实现流程。最后
2012-05-09 15:10:23234 设计了一个嵌入式语音识别系统,该系统硬件平台以ADSP-BF531为核心,采用离散隐马尔可夫模型(DHMM)检测和识别算法完成了对非特定人的孤立词语音识别。试验结果表明,该系统对非特定
2012-07-12 14:02:320 语音交互系统是比较人性化的人机操作界面,它需要语音识别系统的支持。LD3320就是这样一款语音识别芯片。介绍了该芯片的工作原理及应用,给出了LD3320与微处理器的硬件接口电路及
2012-12-21 12:00:3327635 本文介绍了一种基于ARM的光学指纹识别系统的设计方案。##系统软件设计部分针对畸变纠正采用了四点转正算法。
2014-02-24 10:38:192020 基于STM32的语音识别系统的设计与实现
2015-11-09 18:03:0046 FPGA和Nios_软核的语音识别系统的研究。
2016-05-10 10:46:4020 今天,我们就为大家从技术上揭秘科大讯飞的新一代语音识别系统。
2016-08-17 14:31:023245 基于ARM的纸币号码识别系统,有需要的下来看看
2016-08-29 15:31:415 基于LD3320语音识别系统的学习
2016-12-31 15:06:5930 基于语音特征聚类的HMM语音识别系统研究_姚敏锋
2017-03-15 08:00:002 该设计运用三星公司的S3C2440,结合ICRoute公司的高性能语音识别芯片LD3320,进行了语音识别系统的硬件和软件设计。在嵌入式Linux操作系统下,运用多进程机制完成了对语音识别芯片
2017-10-15 10:53:426 ARM+Linux的字符采集与识别系统
2017-10-30 16:42:335 ARM-Linux指纹识别系统的设计
2017-10-31 14:34:5613 引言 随着计算机技术和信息技术的迅速发展,语音口令识别已经成为了人机交互的一个重要方式之一。语音口令识别系统将根据人发出的声音、音节或短语给出响应,如通过语音口令控制一些执行机构、控制家用电器的运行
2017-12-02 09:09:01706 
语音识别是机器通过识别和理解过程把人类的语音信号转变为相应文本或命令的技术,其根本目的是研究出一种具有听觉功能的机器。本设计研究孤立词语音识别系统及其在STM32嵌入式平台上的实现。
2018-01-31 19:23:3417052 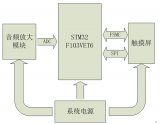
语音识别源于 20 世纪 50 年代早期在贝尔实验室所做的研究。早期语音识别系统仅能识别单个讲话者以及只有约十几个单词的词汇量。现代语音识别系统已经取得了很大进步,可以识别多个讲话者,并且拥有识别
2018-04-25 17:43:305072 近日,在美国波士顿举行的Re-Work深度学习峰会上,美国高通公司的人工智能研究人员克里斯·洛特(Chris Lott)展示了其团队在语音识别系统方面的新进展。
2018-05-30 09:37:323673 随着计算机技术和信息技术的迅速发展,语音口令识别已经成为了人机交互的一个重要方式之一。语音口令识别系统将根据人发出的声音、音节或短语给出响应,如通过语音口令控制一些执行机构、控制家用电器的运行或做出
2019-04-23 15:52:53863 
嵌入式语音识别系统分为封闭域识别和开放域识别,封闭域识别范围围绕指定的字/词语集合,也就是说在开发系统的时候会设定好应识别的字或词语,对范围外的词语语音系统不会识别。
2019-06-12 11:38:092859 对比语音识别技术的两个发展方向,由于基于不同的运算平台,因此具有不同的特点。大词汇量连续语音识别系统一般都是基于PC机平台,而语音识别专用芯片的中心运算处理器则只是一片低功耗、低价位的智能芯片
2019-10-01 09:21:005253 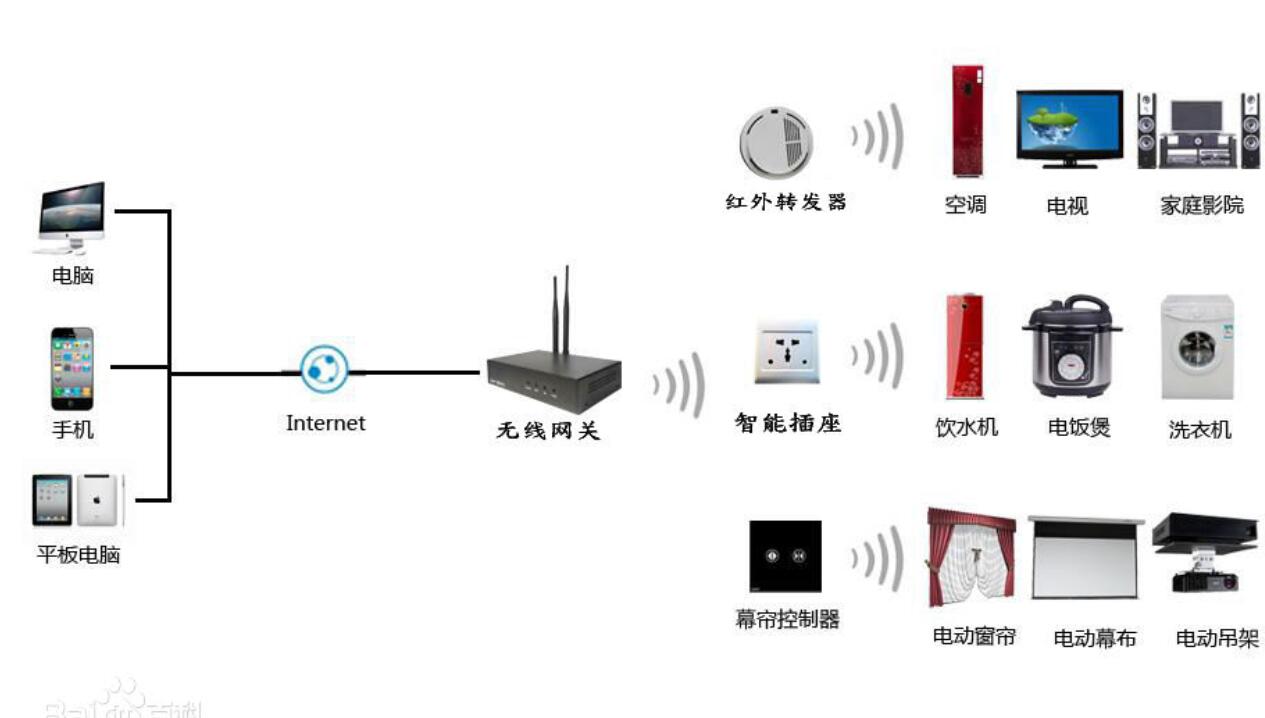
如果单独是因为口音问题,现在这么多在研究语音识别系统的公司,如果合作起来,只要资源共享,这应该不是个问题。
2019-09-24 16:48:28902 结合语音识别技术构建医疗智能语音识别系统,达到减轻医护人员日常工作负担,减少重复性劳动,提高诊疗质量的目的。基于语音识别的关键技术和海量的医疗数据,开发电子病历与检查报告智能语音录入、移动护理智能语音录入、非接触式智能语音数据交互系统。
2019-10-21 16:46:273262 语音辨认单元担任辨认操作人员的操作口令;声强检测单元担任检测声强巨细并以此作为判别是哪台从设备操作人员口令的依据。
2020-03-23 11:33:17481 本文首先介绍了语音识别设置的删除,其次阐述了语音识别系统工作流程,最后介绍了语音识别系统的实现。
2020-04-01 09:47:403750 本文介绍了一种采用ARM处理器作为控制核心的非特定人语音识别系统的设计方案。
2020-04-11 11:17:371180 
语音识别系统是一种模式识别系统,系统首先对语音信号进行分析,得到语音的特征参数,然后对这些参数进行处理,形成标准的模板。这个过程称为训练或学习。当有测试语音进入系统时,系统将对这些语音信号进行处理,然后进行参考模板的匹配,得出结果。此时便完成了语音识别的过程。
2020-04-06 17:13:001524 
该设计运用三星公司的S3C2440,结合ICRoute公司的高性能语音识别芯片LD3320,进行了语音识别系统的硬件和软件设计。在嵌入式Linux操作系统下,运用多进程机制完成了对语音识别芯片
2021-11-01 17:21:0716 语言识别模块对中、大词汇量的语音识别系统特别重要。当分类发生错误时可以根据语言学模型、语法结构、语义学进行判断纠正,特别是一些同音字则必须通过上下文结构才能确定词义。语言学理论包括语义结构、语法
2022-12-29 17:18:20870 电子发烧友网站提供《基于DTW算法语音识别系统仿真及DSP实现.pdf》资料免费下载
2023-10-08 11:52:400 电子发烧友网站提供《基于ARM9的嵌入式指纹识别系统设计.pdf》资料免费下载
2023-10-13 09:25:350 电子发烧友网站提供《语音识别系统的单片机控制.pdf》资料免费下载
2023-10-13 11:22:328 电子发烧友网站提供《基于ARM-Linux指纹识别系统的设计.pdf》资料免费下载
2023-10-23 10:12:020 电子发烧友网站提供《ADSP-BF531在嵌入式语音识别系统中的应用.pdf》资料免费下载
2023-10-23 10:45:052 电子发烧友网站提供《基于DSP的车载语音识别系统方案设计.pdf》资料免费下载
2023-11-08 09:14:380
 电子发烧友App
电子发烧友App









 工商网监
工商网监
评论