优势和特点
- 动态角度输出
-- 四元数、欧拉常数、旋转矩阵
-- 0.1°(俯仰、滚动)和0.3°(偏航)静态精度 - 三轴数字陀螺仪,±450°/s动态范围
- 正交对准:<±0.05°
- 运动中偏置稳定度:6°/小时
- 角向随机游动:0.3°/√hr
- 0.01%非线性度 - 三轴数字加速度计:±10 g
- 三轴角度变化和速度变化输出
- 三轴数字磁力计:±2.5高斯
- 数字压力传感器:
300 mbar至1100 mbar - 自适应扩展卡尔曼滤波器
-- 自动协方差计算
-- 可编程参考重定向
-- 可编程传感器干扰水平
-- 可配置事件驱动控制 - 工厂校准的灵敏度、偏置和轴对准
-- 校准温度范围:−40°C至+85°C - SPI兼容型串行接口
- 可编程工作与控制
-- 4个FIR滤波器库、120个可配置抽头
-- 数字I/O:数据就绪报警指示、外部时钟
-- 可选外部采样时钟输入:最高2.4 kHz
-- 单命令自测 - 单电源供电:3.0 V至3.6 V
- 抗冲击能力:2000 g
产品详情
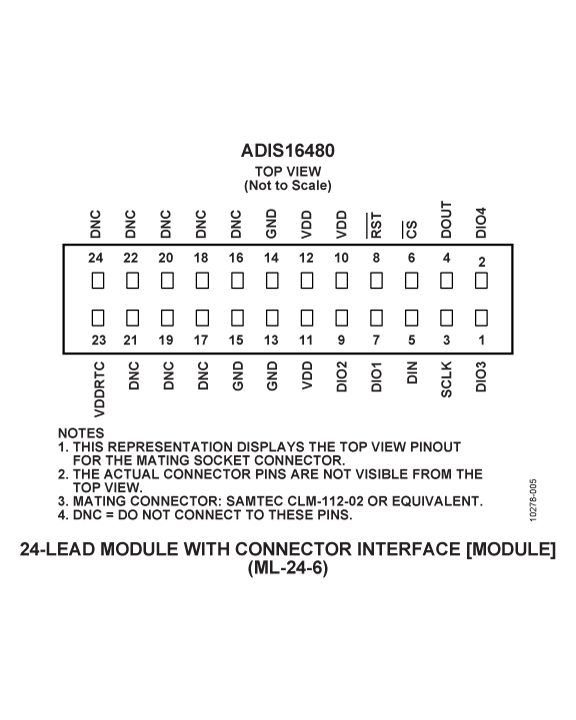
ADIS16480
iSensor®器件是一款用于动态方位检测的完整惯性系统,内置一个三轴陀螺仪、一个三轴加速度计、三轴磁力计、压力传感器和一个扩展卡尔曼滤波器(EKF)。每个惯性传感器都实现了业界领先的iMEMS®技术与信号调理技术的完美结合,可提供优化的动态性能。工厂校准针对各传感器的灵敏度、偏置、对准和线性加速度(陀螺偏置)进行校准。因此,各传感器均有其自己的动态补偿公式,可提供精确的传感器测量。传感器在扩展卡尔曼滤波器中进行进一步相关和处理,以提供自动自适应滤波和用户可编程调谐。因此,除了IMU输出外,器件还可在本地导航坐标系中提供稳定的四元数、欧拉常数和旋转矩阵输出。
与复杂且昂贵的分立设计方案相比,ADIS16480为精确的多轴惯性检测与工业系统的集成提供了简单而高效的方法。所有必需的运动测试及校准都是工厂生产过程的一部分,大大缩短了系统集成时间。严格的正交对准可简化导航系统中的惯性坐标系对准。SPI和寄存器结构针对数据收集和配置控制提供简单的接口。
ADIS16480的尺寸和连接器系统与ADIS16488相同,可大大简化升级过程。它采用约为47 mm x 44 mm x 14 mm的模块封装,配有标准连接器接口。工作温度范围为−40°C至+85°C。
应用
- 平台稳定、控制和指向
- 导航
- 仪器仪表
- 机器人
方框图




 工商网监
湘ICP备 2023018690 号
工商网监
湘ICP备 2023018690 号


