4个82MCS-51单片机的引脚有何功能信号?为何种电平?MCS-51单片机内部包含哪些主要逻辑功能部件?4MCS-51单片机的存储器分为哪几个空间?如何区分不同空间的寻址?MCS-51单片机常用的复位电路有哪些?复位后机器的初始状态如何?
2021-07-08 06:50:32
MCS-51 单片机的指令系统
2013-08-02 19:31:21
`MCS-51单片机与FPGA接口的逻辑设计.........`
2013-06-08 11:25:29
单片机有哪些特点?MCS-51单片机内部包含哪些主要逻辑功能部件?
2021-11-02 08:25:10
实现计算机的基本功能。MCS-51单片机是指由美国INTEL公司(大名鼎鼎的INTEL)生产的一系列单片机的总称,这一系列单片机包括了好些品种,如8031,8051,8751,8032,8052,875...
2021-12-07 07:45:45
MCS-51是指由美国INTEL公司生产的一系列单片机的总称,这一系列单片MCS-51是指由美国INTEL公司生产的一系列单片机的总称,这一系列单片机包括了好些品种,如
2021-07-21 09:29:21
MCS-51单片机原理及接口技术
2013-06-16 20:30:23
MCS-51单片机基本原理[学习要求] 掌握MCS-51单片机的基本概念和基本原理。[重点与难点]重点:单片机的基本原理与内部结构。难点:MCS-51单片机存储器结构。[理论内容]一、MCS-51
2009-03-19 16:39:57
MCS-51单片机存储器结构
2012-08-19 21:12:46
MCS-51单片机指令周期表
2015-06-23 23:31:08
MCS-51单片机指令模拟器是什么?MCS-51单片机指令模拟器有何作用?
2021-08-02 07:14:25
文章目录内存结构程序存储器数据存储器通用寄存器区位寻址区一般RAM区特殊功能寄存器区内存结构MCS-51单片机在物理结构上有四个存储空间:片内程序存储器、片外程序存储器、MCS-51单片机在物理结构
2021-12-01 06:57:55
MCS-51单片机的堆栈及其应用
2013-05-14 20:17:47
第二章 MCS-51单片机硬件结构与工作原理2.1 MCS-51单片机的硬件结构2.2 引脚介绍2.3 复位电路2.4 寄存器2.5 时序2.6 MCS-51的工作方式2.1 MCS-51单片机的硬件结构2.2 引脚介绍2.3 复位电路2.4 寄存器2.5 时序2.6 MCS-51的工作方式...
2021-11-18 06:02:46
MCS-51单片机的结构和原理.pdf
2017-01-18 17:27:24
MCS-51单片机的原理是什么?MCS-51单片机的结构是由哪些部分组成的?
2021-07-14 08:30:39
本帖最后由 eehome 于 2013-1-5 09:56 编辑
MCS-51单片机硬件系统的扩展图已经做好了其他的该怎么做呢????
2013-01-02 14:00:44
本帖最后由 eehome 于 2013-1-5 09:56 编辑
MCS-51单片机硬件系统的扩展该怎么做啊
2013-01-02 13:57:10
本帖最后由 eehome 于 2013-1-5 09:57 编辑
MCS-51单片机硬件系统的扩展MCS-51单片机硬件系统的扩展
2013-01-02 13:29:36
第 2 章MCS-51 单片机硬件结构1. MCS-51 系列单片机的基本结构1.MCS-51 系列单片机的总体基本结构MCS-51 系列单片机主要部件组成:微处理器(MPU)、数据存储器(RAM
2021-12-01 06:56:02
MCS-51系列单片机MCS-51系列单片机分为两大系列,即51子系列与52子系列。51子系列:基本型,根据片内ROM的配置,对应的芯片为8031、8051、8751、895152子系列:增强型
2021-11-30 06:47:04
0·本文引自《嵌入式和单片机系统》MCS是Intel公司单片机的系列符号。Intel推出有MCS-48、MCS-51、MCS-96系列单片机。MCS-51系列即包括三个基本型80c31、8051
2021-12-01 07:28:38
MCS-51系列单片机实用接口技术全面、系统地介绍了MCS-51系列单片机应用系统的各种实用接口技术及其配置。内容包括:MCS-51系列单片机组成原理:应用系统扩展、开发与调试;键盘输入接口
2008-12-23 14:30:45
**MCS-51系列单片机的基本硬件结构**何为单片机?单片机的诞生标志着计算机的发展已经形成了通用计算机系统和嵌入式计算机系统两大分支。作为嵌入式控制器,单片机的设计理念是:微型化、低成本、低功耗
2021-11-24 06:35:38
MCS-51系列单片机的结构和原理.pdf
2017-01-21 13:02:29
Intel公司推出的MCS-51系列单片机以其典型的结构、完善的总线、特殊功能寄存器的集中管理方式、位操作系统和面向控制的指令系统,为单片机的发展奠定了良好的基础。8051是MCS-51系列单片机
2021-11-17 06:37:55
MCS-51系列和80C51系列单片机的区别 MCS是Intel公司单片机的系列符号。Intel
2009-08-12 00:32:21
MCS-51的7种寻址方式8051单片机的内部总体结构其基本特性
2021-02-19 06:00:26
关于ros智能机器人,就是一个写智能机器人代码的一个虚拟机,
2021-10-13 19:20:16
C51单片机与智能机器人 165页 3.0M
2012-08-20 13:20:48
PIC单片机与MCS-51系列单片机的区别(1)总线结构:MCS-51单片机的总线结构是冯-诺依曼型,计算机在同一个存储空间取指令和数据,两者不能 同时进行;而PIC单片机的总线结构是哈佛结构,指令
2017-08-26 14:23:14
MCS-51单片机的硬件结构是由哪些部分组成的?MCS-51单片机的引脚功能有哪些呢?
2022-01-26 07:15:09
关于MCS-51单片机结构与原理的知识点总结的太棒了
2021-10-21 07:34:29
首先简单介绍下PIC单片机和MCS-51单片机。示例:AC164138-2PIC(Peripheral Interface Controller)单片机是由美国微芯公司(Microchip)推出
2023-03-29 11:45:32
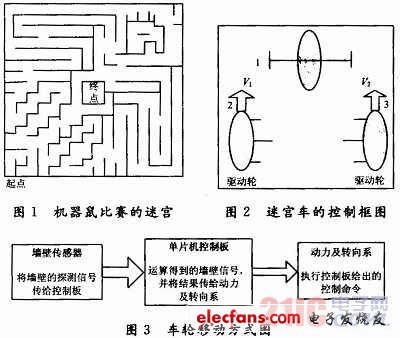
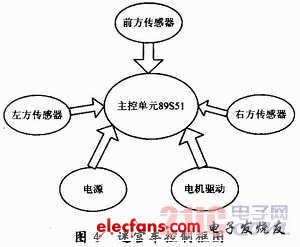
迷宫。为了实现小车识别路线,判断并自动躲避障碍,选择正确的行进路线,障碍判断采用单光束反射取样红外传感器,驱动电机采用直流电机,控制核心采用MCS-51单片机。控制上采用分时复用技术,仅用一块单片机实现
2018-07-19 03:51:14
基于MCS-51单片机智能小车毕业论文
2012-08-16 14:32:45
[url=]增强型MCS-51单片机[/url]
2016-12-11 11:13:28
增强型MCS-51单片机结构
2016-12-19 22:47:07
如何利用MCS-51单片机实现定时器/计数器的时钟设计?
2021-10-20 07:17:45
如何利用C51单片机实现循迹灭火机器人的设计?
2021-11-01 07:59:17
针对如何用MCS-51单片机拓展串口进行通信的问题,本文阐述了如何利用成本低廉的TTL电路实现串口拓展来控制显示和打印,介绍了拓展电路的原理及MCS-51单片机的接口方法,以及串口通信的部分程序的实例。如何用MCS-51单片机拓展串口进行通信[hide][/hide]
2011-11-03 10:06:35
基于STM32F103单片机的智能扫地机器人是由哪些部分组成的?怎样去设计一种基于STM32F103单片机的智能扫地机器人?
2021-09-02 07:50:22
新编MCS-51单片机应用设计电子版谁有吗
2020-07-06 20:12:53
新编MCS-51单片机应用设计(电子书籍)因为太大,所以未能上传下载地址:https://www.elecfans.com/soft/33/2012/20120422268642.html
2012-08-01 21:02:33
mcs-51单片机mcs是什么意思?
2023-10-19 06:17:35
新编MCS-51单片机应用设计 目录
2006-03-21 21:58:39 45
45 新编MCS-51单片机应用设计
2006-03-21 22:03:36576 mcs-51单片机应用教程以MCS-51系列单片机为主线,从实用的角度出发,通过介绍大量单片机技能训练实例和应用实例,指导读者学习和使用单片机。《MCS-51单片机应用教程》分为基
2008-10-28 16:21:3476 1 MCS-51单片机系统扩展的基本概念2 程序存储器扩展技术3 数据存储器扩展4 输入/输出口扩展技术MCS-51单片机系统扩展的基本概念1.1 MCS-51单片机最小应用系统1.2 MCS
2008-12-01 14:39:1965 MCS-51系列单片机实用接口技术全面、系统地介绍了MCS-51系列单片机应用系统的各种实用接口技术及其配置。内容包括:MCS-51系列单片机组成原理:应用系统扩展、开发与调试;
2008-12-23 14:27:36162 源码公开的MCS 51 单片机的宏汇编器 Macro Assembler of MCS MCS-51 micro controller Version 0.12 这是一个应届生写的习作 尽管这个软件A51 还未
2009-01-04 19:48:2334 [学习要求] 掌握MCS-51单片机的基本概念和基本原理。[重点与难点]重点:单片机的基本原理与内部结构。难点:MCS-51单片机存储器结构。[理论内容]一、MCS-51单片机
2009-03-18 22:05:3367 MCS-51系列单片机指令A表MCS-51系列单片机指令d表MCS-51系列单片机指令c表MCS-51系列单片机指令i表MCS-51系列单片机指令j表MCS-51系列单片机指令l表MCS-51系列单片机指
2009-03-18 22:28:2471 本文从硬件和软件两方面介绍了MCS-51 单片机温度控制系统的设计思路,对硬件原理图和程序框图作了简捷的描述。关键词:MCS-51 单片机;温度;软硬件;硬件原理图;程序
2009-08-15 09:59:3925 本文从硬件和软件两方面介绍了MCS-51 单片机温度控制系统的设计思路,对硬件原理图和程序框图作了简捷的描述。关键词:MCS-51 单片机;温度;软硬件;硬件原理图;程序框
2009-08-15 10:00:2873 MCS-51单片机的系统扩展技术:在MCS-51单片机的的内部虽已集成了很多资源,但这类单片机属于一种“通用”的单片机,单片机内部的各种资源都是折衷配置的,如片内程序存储器、数
2009-09-20 18:22:1122 MCS-51系列单片机芯片结构:2.1 MCS—51系列单片机的结构原理2.1.1 MCS-51单片机逻辑结构 MCS-51单片机的系统结构框图如图2.1所示。
2010-02-23 12:04:4469 MCS-51单片机引脚功能教学方法: 讲授法授课时数: 2学时教学目的1、 掌握MCS-51单片机引脚的功能2、 掌握MCS-51单片机引脚的使用教学重点
2010-03-31 08:32:37105 MCS-51单片机讲义资料(汇编)
2010-04-09 13:59:24185 教学内容:2.1 MCS-51单片机的基本结构2.2 MCS-51单片机的引脚及片外总线结构教学方法: 讲授法教学目的1、理解MCS-51单片机分类及特征2、了解单片机内
2010-07-07 15:43:2438 MCS-51单片机的系统扩展技术简述
2010-07-16 12:59:0221 MCS-51单片机是美国INTE公司于1980年推出的产品,与MCS-48单片机相比,它的结构更先进,功能更强,在原来的基础上增加了更多的电路单元和指令,指令数达111条,MCS-51单片机可以算是
2010-08-01 16:33:5918 在MCS-51单片机的内部虽已集成了很多资源,但这类单片机属于一种“通用”的单片机。
2010-08-08 17:18:3326 2.1 MCS-51单片机的外特性2.2 MCS-51单片机内部结构2.3 CPU及复位电路2.4 IO端口2.5 MCS-51存储器2.6 专用功能寄存器2.7 中断系统2.8 定
2010-08-12 11:33:1746 基本内容2.1 MCS-51单片机基本组成2.2 MCS-51存储器配置2.3 MCS-51单片机引脚2.4 单片机的最小系统2.5 并行输入/输出口2.6 单片机执行指令的过
2010-09-13 07:57:1256 MCS-51单片机是美国INTE公司于1980年推出的产品,与MCS-48单片机相比,它的结构更先进,功能更强,在原来的基础上增加了更多的电路单元和指令,指令数达111条,MCS-51单片机可
2006-04-03 00:11:35 2227
2227 MCS-51单片机P0口扩展技术研究
在单片机家族的众多成员中,MCS-51系列单片机以其优越的性能、成熟的技术、高可靠性和高性价比,占领了工业测控和自动化工程应用的主要市
2009-03-18 15:33:281354 
AD574A与MCS-51单片机接口
2009-10-25 11:52:064045 
MCS-51单片机外中断软件编程
MCS-51单片机有多个中断源,以8051为例,有5个中断源,两个外中断、两个定时中断和一个串行中断,这一节我们讨论外中
2010-03-06 10:08:021236 
电子发烧友网站提供《MCS-51单片机原理与应用(C语言版).txt》资料免费下载
2012-08-14 13:09:000 电子发烧友网站提供《[新编MCS-51单片机应用设计].张毅刚.彭喜元.姜守达.乔立岩.扫描版.txt》资料免费下载
2012-08-24 12:29:380 本书从应用的角度,详细地介绍了MCS-51单片机的硬件结构、指令系统、各种硬件接口设计、各种常用的数据运算和处理程序及接口驱动程序的设计以及MCS-51单片机应用系统的设计,并对
2012-10-28 10:06:1884 本书全面、系统地介绍了MCS-51系列单片机应用系统的各种实用接口技术及其配置。 内容包括:MCS-51系列单片机组成原理:应用系统扩展、开发与调试;键盘输入接口的设计及调试;打
2012-10-28 11:10:59196 MCS-51单片机应用系统详解,感兴趣的可以下载看看。
2015-11-06 18:19:192 MCS-51内核衍生型单片机芯片及应用
2016-12-11 23:41:100 MCS-51单片机的结构和原理
2016-12-11 23:41:100 增强型MCS-51单片机
2016-12-11 23:38:390 增强型MCS-51单片机结构
2016-12-11 23:41:100 MCS-51单片机 实验集合(9个实验)
2016-12-11 23:38:390 MCS-51系列单片机的特点及应用
2017-01-04 13:09:310 MCS-51系列单片机的结构和原理
2017-01-04 13:09:430 MCS-51单片机的硬件结构与工作原理
2017-06-21 15:18:1313 mcs-51系列单片机实用编程88例
2017-09-11 09:17:290 MCS-51单片机原理及接口技术与应用
2017-09-20 12:36:4920 MCS-51单片机结构资料说明
2017-09-21 13:43:004 MCS-51单片机的温度控制系统
2017-09-21 13:50:0025 本文档的主要内容详细介绍的是MCS-51单片机的硬件结构详细资料概述内容包括了:1.MCS-51 单片机主要功能特点 2.MCS-51 单片机内部结构分析3.MCS-51 单片机的引脚功能4.MCS-51 单片机的存储器组织.MCS-51 5.CPU时序
2018-10-23 16:11:3416 MCS-51单片机应用设计说明。
2021-05-24 14:27:0641 文章目录二、MCS-51单片机结构与原理1、8051单片机引脚2、并行输入/输出端口结构二、MCS-51单片机结构与原理MCS-51单片机芯片有许多种,如8051、8031、8751、80c51
2021-11-10 18:35:597 第二章 MCS-51单片机硬件结构与工作原理2.1 MCS-51单片机的硬件结构2.2 引脚介绍2.3 复位电路2.4 寄存器2.5 时序2.6 MCS-51的工作方式2.1 MCS-51单片机的硬件结构2.2 引脚介绍2.3 复位电路2.4 寄存器2.5 时序2.6 MCS-51的工作方式...
2021-11-11 09:36:0110 2.1 MCS-51 单片机主要功能特点2.2 MCS-51 单片机的引脚功能2.2.0 电源及时钟引脚2.2.1 时钟电路2.2.2 控制信号2.2.2 控制信号2.2.3 I/O口
2021-11-11 11:36:029 MCS-51总体概述(二)1. CPU的时序及辅助电路1.1 CPU时序的基本概念1.2 时钟电路1.3 复位电路2. MCS-51的引脚及片外总线结构2.1 MCS-51的引脚功能2.2
2021-11-23 16:22:563 0·本文引自《嵌入式和单片机系统》MCS是Intel公司单片机的系列符号。Intel推出有MCS-48、MCS-51、MCS-96系列单片机。MCS-51系列即包括三个基本型80c31、8051
2021-11-23 16:23:078 MCS-51系列单片机指令表
2021-11-23 16:51:1522 第 2 章 MCS-51 单片机硬件结构1. MCS-51 系列单片机的基本结构1.MCS-51 系列单片机的总体基本结构MCS-51 系列单片机主要部件组成:微处理器(MPU)、数据存储器
2021-11-23 16:51:1915
 电子发烧友App
电子发烧友App









 工商网监
工商网监
评论