NRF24L01芯片,天线的尺寸有哪位大神指点一下。
2013-10-24 11:24:48
求大神给份NRF24L01模块的发送和接收c语言模块检测程序,能够检测出硬件连接是否正确,自己写的程序没有反应,也不知道程序有错还是连接有错,用的是两个NRF24L01模块
2013-09-25 21:46:05
谁有NRF24L01可执行的C语言程序,有的发我一个,QQ:1603994716,谢谢!
2015-04-01 14:02:26
NRF24L01 SCH文件(NRF24L01的原理图)
2012-11-26 14:46:02
NRF24L01按键控制LED灯能够控制,为什么不能控制小车?
2015-06-23 14:12:13
32做的小车,NRF24L01实现无线控制,想实现:发送方一直按着发送方的某个按键,接收方才执行相应动作,松开后停止执行,请问该怎么设计程序?
2020-07-25 08:00:25
我想用无线模块控制职能小车,通过发射的32单片机key1和key2来选择1,2,3,4,然后通过NRF24L01传输,程序弄好后开始会进入死循环过几分钟就可以传输了,刚开始的几次实验还是可以的,但是
2020-07-14 21:12:06
用NRF24L01做的无线控制小车
2014-05-04 08:01:08
NRF24L01无线模块资料nRF24L01中文说明书.pdf (711.29 KB )NRF24l01模块说明书.pdf (676.36 KB )NRF24L01功能使用文档.pdf
2020-05-29 04:35:38
基于STC89C52的NRF24L01无线温度传输(DS18b20).两个1602显示.整理了一些程序,比较浅显易懂,测试可以用DS18b20采集到温度后1602显示,NRF24l01传输,另一个2401接收到后另一个1602显示出来。本人小白,请大家指正
2015-07-16 16:33:16
NRF24L01是如何去定义的 ?NRF24L01有哪些特性呢?SPI有哪些指令呢?如何对SPI的操作指令进行初始化呢?
2021-12-16 07:02:19
最近在做一个关于NRF24L01的无线传输的东西,想把NRF24L01直接画到板子上面,不用现成的模块,。。。不知道NRF24L01的天线怎么绘制啊,希望做过的朋友们指导一下,给点经验或者计算工具之类的,小弟在此先谢谢了。。。。
2020-06-02 05:30:17
以NRF24L01为例,实现无线通信NRF24L01采用SPI通信,可以很方便的连接到MCU上。NRF24L01的特点:(1)2.4G全球开放的ISM频段,免许可证使用。(2)最高工作速率2Mbps
2022-02-28 07:30:16
谢谢原子老师及前辈们宝贵的经验,让我2天调试好了NRF24L01。1. 实现战绩开发板与STC15W4K(硬件SPI)通讯2. 实现相互6发1收通讯,并能获取接收到数据的通道3. 可指定通道任意接收
2020-06-10 04:36:09
最近做了一个小车,被这个NRF24L01给烦死了。车身控制芯片为ATmega16,遥控的控制芯片是STC90C516RD+,现在就是NRF通信不能够连续有效,顶多是上电时动一下,后面就没有任何反映了,用的是触摸屏控制的,有没有大神能够指点我一二啊!!!
2020-07-24 08:01:19
本帖最后由 3010203109 于 2013-7-13 12:03 编辑
放假期间闲着,于是利用手边闲置的东西,东拼西凑,做了一个无线遥控小车,与大家分享:*采用NRF24L01射频模块+ATMEGA8L控制器*自制6键遥控器*前置超声测距,LCD12864显示距离*遥控音乐播放
2013-07-13 11:36:58
谁有QFP 封装的STC89C52的数据手册,分享我一封资料呗
2013-07-16 10:32:30
用学习板自带的STC89C52可以下载程序,在淘宝上买了2块新的STC89C52却不能下载是为什么?
2017-05-01 12:41:27
STC89C52单片机,STC89C52STC89C52看到涛哥这篇文章了,纪念一下还在搞嵌入式的我们!硬件实物图实物抽象化的图为:这个STC89C52名字是什么意思呢?STC89C52简介:片内
2021-12-02 07:43:57
我想用STC89C52的芯片写一个摇杆控制遥控小车的程序,我不懂模数转换,哪位大神能给我一个具体的程序
2017-08-14 18:22:36
STC89C52资料大全
2016-02-21 10:07:10
想实现通过距离来报警的目的,即无线距离报警器,现在问题是甲板(发送端)子能通过nrf24l01给乙板子发信号,乙板子(接收端)能收到,但随后乙板子通过nrf24l01发给甲板子信号,甲板子却无法接收
2013-03-08 17:49:53
液晶显示接口,蓝牙串口模块接口,NRF24l01模块接口等。丰富的外设资源可以免去新手入门时硬件搭建的麻烦,使其可以集中精力攻克51单片机。为了兼容STC89C52等旧型号的单片机,P0口增加了上拉电阻
2013-11-04 15:55:23
nRF24L01无线通信模块使用简介(STC51)接收端书接上回,上篇博客给出了nRF24L01搭配C51单片机进行无线通信的发送端代码。这里给出接收端代码。接收端接收端的功能主要是接收发送端发来
2021-12-03 06:42:20
nRF24L01无线通信模块使用简介(STC51)nRF24L01研一课设做过一个基于nRF24L01的无线温湿度传感器,在这里把C51单片机搭配nRF24L01的无线通信模块部分单独拿出来简单写
2021-12-03 08:24:14
本帖最后由 804682887 于 2013-1-9 15:41 编辑
最近我用两个nRF24L01和STC89C52想玩一下无线模块,不过在调试过程中我发现发射端能够发送数据,但是接收端不
2013-01-09 15:20:53
nrf24l01_89C52RC 查询收发.rar (164.11 KB )nrf24l01_STM32F103C8T6查询接收发.rar (10.44 MB )不同单片机的nrf24l01参数已经设置一样,这两个不同单片机程序也可以直接相互通信
2020-06-16 02:16:32
新手上路,求一个nrf24l01+和STC89C52RC的接法的电路图!
2013-04-18 16:57:38
自己最近在做单片机采集通过无线传递上位机。。无线选用的是nrf24l01模块。。自己用的是stc89c52,用的5v转3V的转接板。已经跳了一个多礼拜。现在是一点进展都没有。有个学长用的是12系列
2012-11-16 18:19:45
一个nrf24l01的遥控小车 可以当做学习NRF24L01的学习资料哦 我找了很多才找到的
2015-06-17 20:16:53
stc89c52
2012-08-17 22:47:10
谁能给一个基于stc89c52的红外遥控开关的设计
2015-02-03 11:24:03
两个板子,单片机是stc89c52,其中甲板能通过nrf24l01给乙板子发信号,乙板子能接收,但乙板子发过nrf24l01发送给甲板子的信号,甲板子却不能接收,这可能是什么原因,求解
2013-03-08 17:43:08
stc89c52和stc89c51有啥区别呀,小白刚刚学单片机
2016-11-28 23:22:35
今天用NRF24L01做无线控制,接收的if(nRF24L01_RxPacket(RxBuf))判断语句一直为真,Proteus模拟仿真也是一样,而且status寄存器全是0xFF,各位大佬能帮忙解决一下吗
2022-07-21 20:39:38
原子的四轴飞行器很棒!最近买了一个玩的很开心。想用原子的遥控器控制自己DIY的小车。遇到了问题。首先为了熟悉一下NRF24L01,使用MiniSTM32光盘里的NRF24L01源码,淘宝上1100米
2020-06-16 06:44:01
我用两块STM32进行NRF24L01的通信时一点问题都没有,可是换了stc15的做发送端的时候根本就没有反应,是不是他们之间的数据格式有问题还是什么有问题呢?希望得到各位大佬的指教,关于地址啥的都写相同了,时序也是没有问题的可是就是不行
2020-06-15 04:35:25
请问一下:这两种芯片at89s52与stc89c52可以相互替换吗?而且用于at89s52的程序可用于stc89c52吗?今天做了电路板,但由于条件不足程序不能烧进at89s52,所以就换成stc89c52!
2014-06-14 18:11:24
用stm32mini板子上NRF24L01和STC11L04E模块上的NRF24L01通信,mini板子发送成功,用的完全是原子哥的代码,但是插在电脑端的STC11L04E模块显示收不到数据。是不是
2020-05-12 00:58:29
什么是nRF24L01?
2021-10-09 07:31:40
求一段基于STC89C52的程序。该程序是控制NRF24L01让一块模块自己与自己通信——程序只要实现按键按下led灯亮即可。
2013-08-01 15:37:41
基于STC12C5A32S2的NRF24l01程序,有人调通过吗?求指导。
2014-08-27 22:16:57
了 现在手上只有STC89C52芯片,不知道是否可以把原来设计使用的AT89S52换STC89C52芯片来使用,(直接把原来的程序烧进去)就是只换芯片 板子没有任何改变 求助大家帮忙解答谢谢了!!
2012-12-23 22:27:26
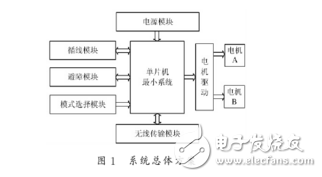
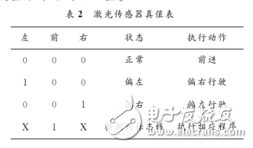
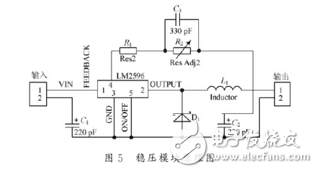
摘要:针对智能车的控制系统, 选用STC89C52作为整个系统的主控芯片, 并进行硬件电路设计;以NREF24L01作为无线接收模块, 选取E18-D80NK-N红外光电传感器作为避障模块的核心器件
2021-08-23 07:49:54
大家好,最近做了一个基于NRF24L01的无线接收系统,单片机用的是STC89LE52,变了一个程序,寻高手帮忙看看!!!!!
2011-07-04 20:34:43
基于stc89c52蓝牙四轮小车 protell99sesch(原理图)"mss130303.Ddb"http://vdisk.weibo.com/s/smWoo
2021-07-20 07:23:14
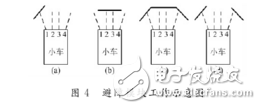
单片机的应用与开发智能循迹避障小车摘 要:利用红外对管检测黑线与障碍物,并以STC89C52单片机为控制芯片控制电动小汽车的转向,从而实现自动循迹避障的功能。关键词:智能小车 STC89C52单片机
2021-07-26 06:17:37
nRF24L01/nRF24L01+模块的针脚,它是通过SPI跟Arduino通信等,不熟悉SPI的可以参考《Arduino常用的三种通信协议UART, I2C和SPI》。nRF24L01
2023-05-15 15:41:27
如何使用基于NRF24L01的遥控器和接收器给小车发指令呢?如何去制作简单的小车运动控制程序呢?
2021-12-16 07:30:58
如何利用STM32F3C8T6与NRF24L01去实现遥控小车的设计呢?
2021-12-16 06:20:29
DS18B20无线测温所做的工作主要包括:1.利用DS18B20 温度传感器采集温度;2.制作一个基于STC89C52 单片机的温度采集系统,并将采集信息数据通过NRF24L01无线传输模块传送给计算机,利用计算机对其进行实时显示、存储,以便进行数据分析。#include type
2021-12-02 08:48:39
如何去实现NRF24L01与STC15F204EA数据的收发呢?
2021-12-20 08:07:02
见基于STC89C52开发的智能小车,该小车具有流水灯模块、蜂鸣器模块、独立键盘模块、矩阵键盘模块等。本实验采用蜂鸣器模拟,通过pwm驱动蜂鸣器来实现不同的音调,采用红外对管检测来模拟感应系统,当有人通过时,指示灯亮(此时返回值为0),门铃发出四种不同的声音。...
2021-12-08 06:37:37
基于STC89C52的小车制作上篇,用电机将小车驱动起来之对L298N逻辑输入N1~N4详解逻辑输入N1,N2用于控制通道A的电机逻辑输入N3,N4用于控制通道B的电机当N1=1
2021-12-08 07:32:08
怎么实现基于STC89C52自动循迹小车的设计?
2021-09-29 08:51:58
1.设计要求利用蜂鸣器播放《小星星》的音调2.设计概述本实验所用芯片为STC89C52,所用硬件是由华清远见基于STC89C52开发的智能小车,该小车具有流水灯模块、蜂鸣器模块、独立键盘模块、矩阵
2021-12-08 06:47:02
摘要:针对智能车的控制系统, 选用STC89C52作为整个系统的主控芯片, 并进行硬件电路设计;以NREF24L01作为无线接收模块, 选取E18-D80NK-N红外光电传感器作为避障模块的核心器件
2021-12-08 08:30:05
基于STC89C52芯片的家庭智能消防系统是由哪些模块组成的?怎样去设计一种基于STC89C52芯片的家庭智能消防系统?
2021-10-20 06:25:47
基于STC89C52RC单片机的多功能智能小车是由哪些部分组成的?怎样去设计基于STC89C52RC单片机的多功能智能小车?
2021-10-14 15:00:59
1.设计要求利用直流电机充当风扇,键盘可以调整风扇的转速,数码管显示风扇的转速。2.设计概述本实验所用芯片为STC89C52,所用硬件是由华清远见基于STC89C52开发的智能小车,该小车具有流水
2021-12-02 07:08:06
见基于STC89C52开发的智能小车,该小车具有流水灯模块、蜂鸣器模块、独立键盘模块、矩阵键盘模块等。这里着重介绍流水灯模块,流水灯模块共有八个不同颜色的LED灯,由主控芯片STC89C52的P1端口八个引脚分别控制。此外,STC89C52不具备...
2021-12-02 07:03:41
我正在做一个关于单片机AT89S52与NRF24L01无线环境监测的系统。是一对多的那种,但是在SPI接口设计上就碰到难题了,AT89S52与NRF24L01可以直接相连吗?我用的P1口。该怎么连
2014-04-28 13:48:33
求NRF24L01资料,与8051单片机结合,及NRF24L01无线传输温度程序
2016-04-12 08:38:18
我是大二的学生参加飞思卡尔智能汽车比赛,用到了无线模块NRF24L01 ,但我学习了好久还是有很多不懂得地方,求大神指导,无线模块与单片机如何连接(STC89C52IO口),无线模块是如何发送数据
2013-06-04 19:52:36
硬件配置在做这个小项目前, 考察过STM32F103C8T6, STM32F401CCU6和STC89C52这三个MCU, 并实际跑了一些用例STC89C52在代码上要简单得多, 它的问题是没有
2021-09-02 06:02:07
谁有STC89C52单片机小车程序麻烦上传上来看看
2013-11-15 09:14:22
The state diagram (Figure 3.) shows the modes the nRF24L01 can operate in and how
2008-10-04 21:46:10 423
423 基于STC89C52单片机的智能交通灯控系统设计
2016-02-22 11:37:11105 基于STC89C52单片机的智能循迹小车设计,做毕业设计的人很有用。
2016-05-09 10:59:2685 此程序是关于nrf24L01无线传输程序,经过测试可行。
2016-05-13 16:40:2333 STC89C52单片机介绍。
2016-05-20 13:55:11244 NRF24L01
2016-12-20 22:19:4611 NRF24L01 51,stm32,430程序
2016-12-29 20:56:4525 关于NRF24L01的使用手册
2017-10-09 16:40:4858 本文档的主要内容详细介绍的是89C52单片机和nRF24L01无线收发器芯片应用的收发程序免费下载。
2019-05-06 16:40:0858 本文首先阐述了nrf24l01概念,其次介绍了nrf24l01的性能参数,最后介绍了nrf24l01的工作原理。
2020-04-24 08:47:01 18687
18687 本文主要阐述了nrf24l01发射功率测试步骤及nrf24l01的应用领域。
2020-04-24 08:55:047115 基于STC89C52单片机智能小车设计方法介绍。
2021-05-28 10:57:4696 基于单片机STC89C52控制的智能小车简介(单片机原理图)-该文档为基于单片机STC89C52控制的智能小车简介资料,讲解的还不错,感兴趣的可以下载看看…………………………
2021-07-22 14:21:1762 基于89c51单片机的NRF24L01通信实验
2021-08-31 10:38:2681 基于NRF24L01的AVR双机通信
2021-11-15 21:06:065 nRF24L01无线模块笔记
2021-11-20 12:21:0353 STC89C52单片机,STC89C52STC89C52看到涛哥这篇文章了,纪念一下还在搞嵌入式的我们!硬件实物图实物抽象化的图为:这个STC89C52名字是什么意思呢?STC89C52简介
2021-11-23 17:06:35108 见基于STC89C52开发的智能小车,该小车具有流水灯模块、蜂鸣器模块、独立键盘模块、矩阵键盘模块等。这里着重介绍流水灯模块,流水灯模块共有八个不同颜色的LED灯,由主控芯片STC89C52的P1端口八个引脚分别控制。此外,STC89C52不具备...
2021-11-23 17:21:1829 请问基于51单片机用按键和nrf24l01模块控制小车移动为什么有问题呢?发送#include <reg52.h>#include <
2021-11-23 17:36:2825 摘要:针对智能车的控制系统 选用STC89C52作为整个系统的主控芯片 并进行硬件电路设计;以NREF24L01作为无线接收模块 选取E18-D80NK-N红外光电传感器作为避障模块的核心器件;并用
2021-11-25 15:36:098 STC89C52
2021-11-25 15:51:04150 STC89C52芯片手册_.pdf
2022-02-10 14:30:22471 电子发烧友网站提供《基于STC89C52的智能照明系统设计.pdf》资料免费下载
2023-11-06 11:41:460
 电子发烧友App
电子发烧友App









 工商网监
工商网监
评论