 3D打印,20分钟打造毫米级微型机器人!
3D打印,20分钟打造毫米级微型机器人!
微型机器人在医疗中大有用途,如输送药物、采集组织样本,协助手术等。近日,多伦多大学和MIT的两个研究都采用磁性材料和3D打印,研发出可控制的、只有几毫米大小的微型机器人。
能够在体内运送药物和帮助医生进行手术的微型机器人一直是科学家们的梦想。
但科学家们目前研发出来的微型机器人原型都是刚性的,而且通常很慢,无法即时响应发给它们的无线指令。
现在,研究人员已经开发出几毫米大小的微型机器人,它们可以折叠成无数种不同的形状,这让它们能够执行抓取物品、爬行等操作 —— 使用磁铁作为遥控器。
论文第一作者徐天启展示他们研发的微型机器人
来自多伦多大学微型机器人实验室的徐天启 (Tianqi Xu)、Jiachen Zhang、Mohammad Salehizadeh, Onaizah Onaizah 和 Eric Diller 等人近日在 Science Robotics 杂志上发表了该研究的论文。

使用磁铁控制的话,机器人也必须要使用磁性材料,因此以前的磁控微型机器人是硬质的。
为了打造一个灵活的磁控机器人,研究人员将磁性元素钕的粒子嵌入到更柔软的材料中,比如塑料。
研究人员使用一对强力的磁铁来翻转机器人特定部位的钕的极性,使它们在磁场中发生排斥和吸引,从而实现折叠。然后,他们将紫外线照射在这些部位上,固化嵌入在里面的材料,并将它们锁定在特定的位置。
研究人员给机器人编程,使其能够通过控制不同部位的极性来进行 3D 运动,如抓取、爬行和游泳。
机器人能够折叠:
爬行
游动
机器人能够折叠抓、爬行、游动等
为了协助外科手术或在人体内运送药物,未来的机器人将需要放弃有毒性的钕,转而使用铁等危险性较低的金属。研究人员表示,使用铁等金属仍然可以让机器人工作,但可能需要更强的磁铁来操纵。除了医疗应用外,这些机器人还可以被用于小型工厂生产微型的产品。
3D 打印,仅需 20 分钟打造,游戏手柄控制
过去,组装一个微型机器人需要一对尖嘴镊子、一台显微镜,需要研究人员稳定的双手,以及至少 8 个小时的操作时间。但多伦多大学的这个研究采用 3D 打印技术,仅需 20 分钟即可打造出磁性毫米级微型机器人。
3D打印微型机器人所需的物理材料
多伦多大学微型机器人实验室由 Eric Diller 教授领导,他们开发的磁性微型机器人只有针尖大小,可以穿过充满液体的血管和人体内的器官。
Diller 和他的团队利用磁场,无线控制这些机器人的运动。
实验中使用一个游戏手柄来控制微型机器人的运动
每个微型机器人都由几个扁平柔性材料的 “薄片” 组成,上面精确地排列着磁针。
组装完毕之后,研究人员就利用磁场诱导机器人,让机器人像蠕虫一样在流体通道中移动,或者将其微小的 “夹片” 合起来,从而能够采集组织样本。
机器人抓取了一个薄片(绿色)并运动
论文一作徐天启表示:“微型机器人制造起来相当困难,而且需要高强度的工作,因为制造这种机器人需要十分精确。此外,由于需要手工装配,让机器人变小就更加困难了,这也是我们的研究的主要目的。”
徐天启和他的同事们开发的这种自动化方法,大大减少了设计和制造时间,并扩大了可以制造的微型机器人的种类。
为了验证他们的新技术的能力,研究人员设计了 20 多种不同的机器人形状,然后将其编程到 3D 打印机。然后打印机构建并固化设计,磁性颗粒定向是这个过程的一部分。
这种新的优化方法为开发比目前的毫米规模更小、更复杂的微型机器人打开了大门。Diller 说:“我们相信,有朝一日可以将机器人的尺寸再缩小 10 倍。”
研究细节:设计、材料和方法
图1:用于图案化离散3D磁化的系统示意图。(A)用于在UV可固化弹性体基质复合材料中图案化永磁颗粒的物理设备。DOF:自由度。(B)实验测量的最大交联厚度相对于磁性颗粒浓度。误差条表示SD。(C)具有水平和垂直磁化分量的双层结构的示意图。黄色箭头表示在每个块中的磁化方向。(D)双层结构的顶视图图像。单位比例尺代表实际长度2毫米。(E)使用磁光传感器分别在各层的近表面处测量的面外磁通分布。利用独立制造的两层拍摄磁光图像以更好地可视化磁化分布。
图2:具有分布式3D磁化分布的柔性磁平面结构。黄色箭头表示局部磁化的方向,绿色箭头表示致动磁场的方向。材料厚约80微米。“手风琴”的驱动磁场为200 mT,其他所有磁场均小于20 mT。所有组件都可以在原始形状和折叠形状之间进行快速可逆转换。
图3 用于预测形变的模型和在3D环境下调整制造角度组件。(A)侧视图像显示出在20mT磁场下的大角度偏转。(B)大角度偏转的数值模型。(C)侧视图显示20mT磁场下环的波动弯曲。(D)使用有限元法进行模拟。(E)三臂结构的几何形状,尺寸和磁化分布。单位:mm。(F)具有不同磁化分布的三臂结构的俯视图。比例尺:2mm。
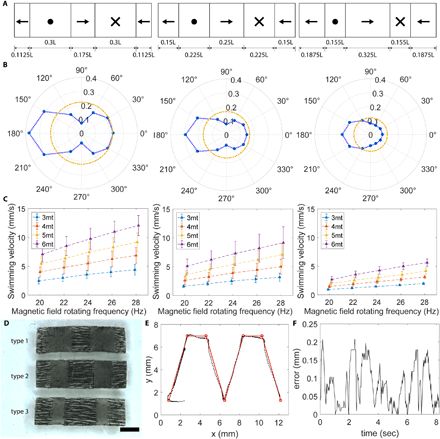
图4:毫米级分段磁性swimmer。(A)三种类型swimmer的磁化曲线。长L为4.5毫米。(B)模拟swimmer的TWC分析。蓝色标记表示每个阶段的形变,黄色虚线表示一个周期中的等效形变圆。(C)swimmer在不同条件下的实验游泳速度。实心三角形代表六个样本的平均值,误差条代表SD。(D)在一个过程中由相同前体制造的分段swimmer。比例尺:1mm。(E)磁性swimmer的追踪路径。(F)磁性swimmer的路径跟随误差。
图5:非束缚性多臂磁性微夹钳。(A)磁性微夹钳的几何形状,磁化曲线和工作结构。黑色箭头表示每个组件的局部磁化方向,蓝色箭头表示驱动磁场。(B)货物运输任务示意图。(C)在硅油中货物运输任务的俯视图和侧视图。硅油用于提升体重并减缓夹具的形变,使开环控制更容易。比例尺,5mm。(D)不同场强下不同微夹钳的特写图像。比例尺:2mm。
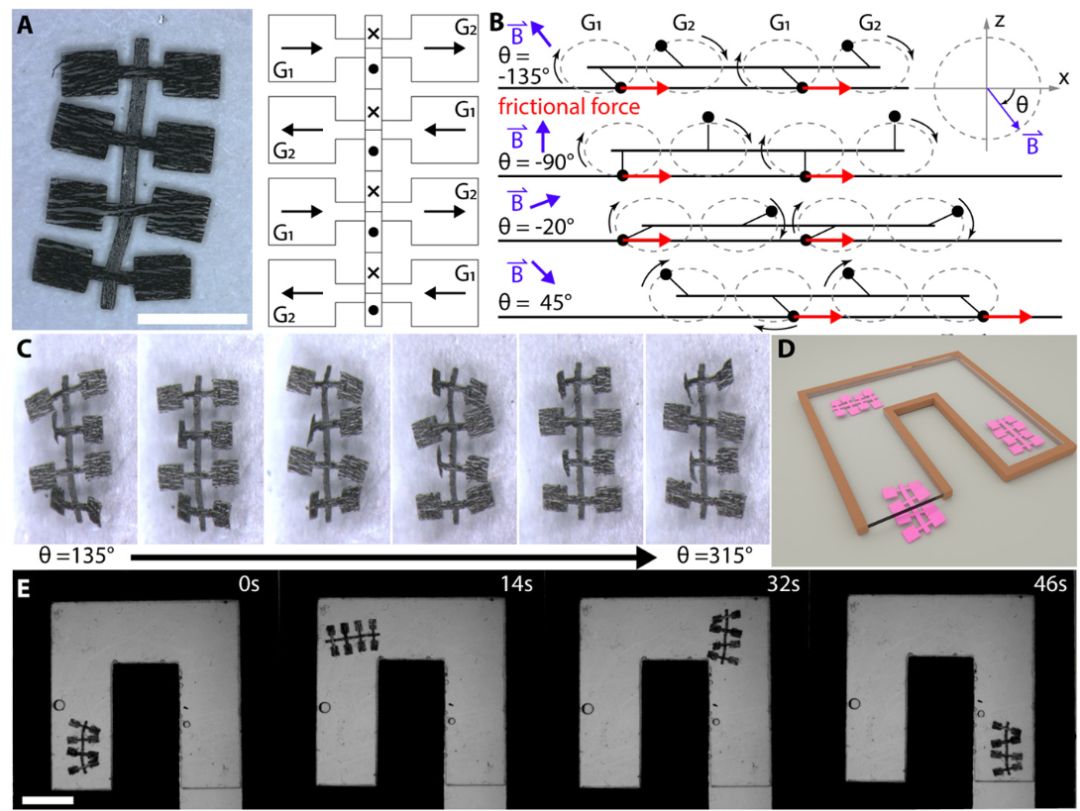
图6 多足桨式爬行机器人。(A)桨式爬行机器人的图像和磁化曲线。局部磁化用黑色箭头表示。当标记为G1的腿执行动力冲程时,标记为G2的腿执行恢复冲程,反之亦然。比例尺,2毫米。(B)侧面步态的示意图。(C)不同阶段的机器人的俯视图。(D)微通道示意图。通道的横截面为4.7毫米×1.0毫米。(E)俯视图,显示机器人在填充有硅油的微通道中的运动。硅油用于提升体重并减慢机器人的行程运动,使摄像机能够清晰地捕捉到运动。水中的冲程运动和机器人的速度相对更快。比例尺:4mm。
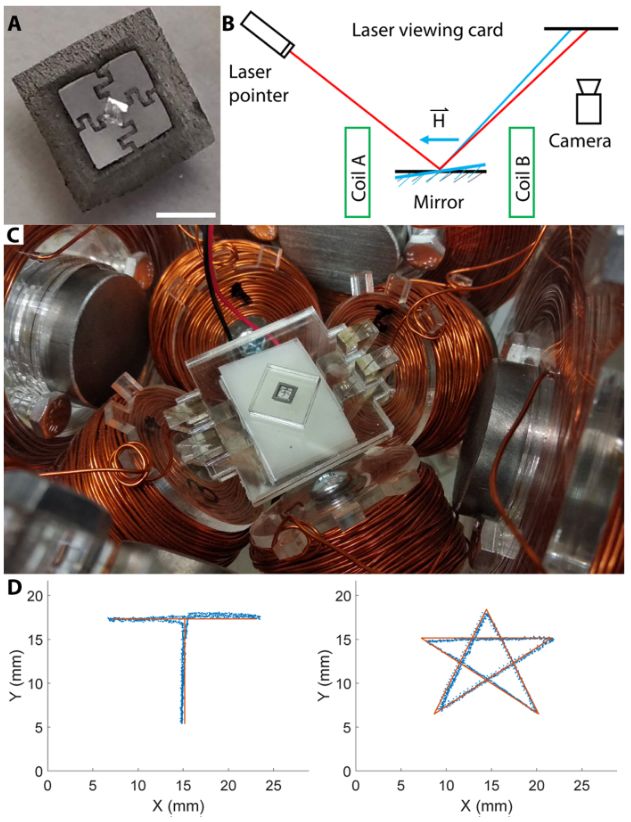
图7 用于激光转向的非受限型磁镜安装座。(A)镜架图,中间装有一个小镜子。该结构的磁化分布如图2L所示。比例尺:2mm。(B)激光转向实验示意图。(C)实验中使用的线圈系统。(D)激光的目标轨迹(橙色)和实验轨迹(蓝色)。T形和星形轨迹的跟踪频率分别为0.5Hz和0.2Hz。
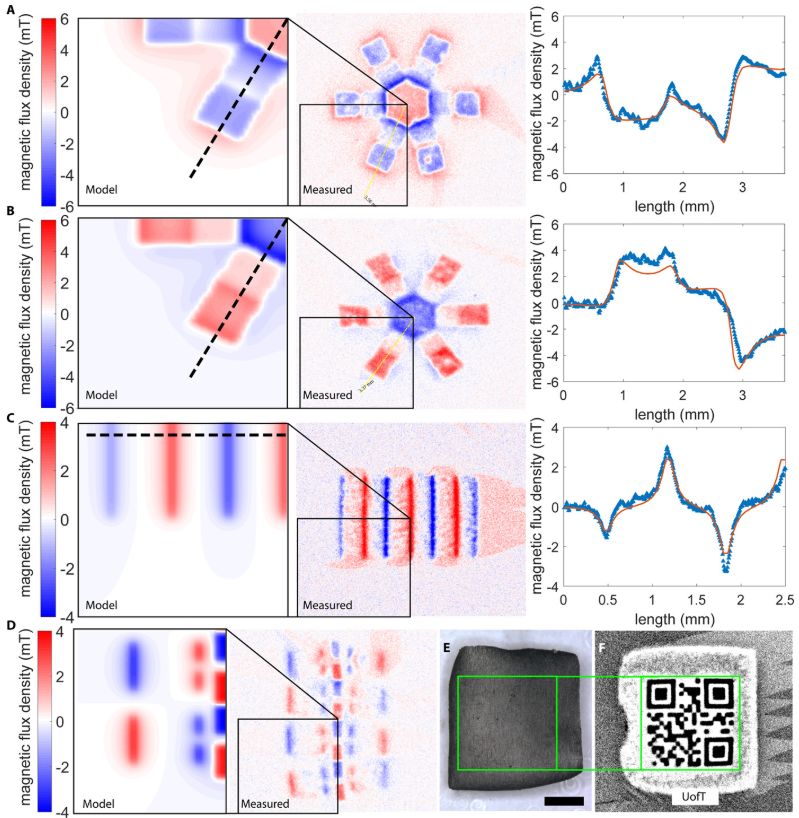
图8 不同样品近表面的磁通量分布。以及沿(A)六臂磁性微夹钳(前),(B)六臂磁微夹钳(后),(C)折叠结构(D)多足桨式爬行机器人。数据收集自距样品表面60μm处,使用最小二乘拟合将模型中的磁化强度拟合到测量数据中。(E)带有磁二维码“UofT”的聚合物薄片。比例尺:2mm。(F)为相对于(E)的二维码样品的表面处测得的磁通量。
MIT磁控微型机器人,可用于运送药物
未来的医学应用需要更小、更复杂的微型机器人,例如进行靶向药物运送、辅助受精或活体组织检查。
比如,如果医疗应用需要在泌尿道或大脑的液腔中采集组织样本,手术机器人必定要求尺寸更小。
采用磁性来控制,是微型机器人研究一个有前景的趋势。这方面另一个引人瞩目的研究来自MIT的工程师,他们设计了一种微型机器人,可以通过病人的血液中向病灶区域输送纳米级的药物颗粒,使药物能够进入肿瘤或其他病灶区域。
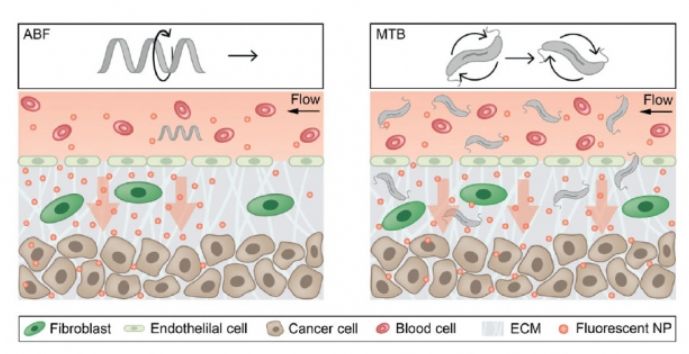
研究人员受到细菌的推进和运动方式的启发,打造出的磁性微型机器人有助于克服纳米粒子输药的最大障碍之一:如何让粒子离开血管并集聚在正确的位置。
这个微型送药机器人只有0.35毫米大小,可以通过外部磁场来控制。这种受生物学启发的机器人被研究人员称为“人造细菌鞭毛”,由一种微小的螺旋结构组成,类似于细菌推进自身运动的鞭毛。这些机器人使用高分辨率3D打印机进行打印,然后涂上镍,使其具有磁性。
为了测试单个机器人控制附近纳米粒子的能力,研究人员打造了一种模拟肿瘤周围血管的微流系统,系统中的通道宽度在50到200微米之间,通道内侧涂有凝胶,上面开了孔,以模拟肿瘤附近的破裂血管。
研究人员向机器人施加外部磁场,使其旋转并在通道中游动。研究人员表示,这种机器人可用于供药,以减轻支架周边部位的炎症。
-
编程
+关注
关注
88文章
3440浏览量
92383 -
微型机器人
+关注
关注
0文章
110浏览量
19353 -
3D打印
+关注
关注
26文章
3475浏览量
107656
原文标题:中国一作研究再登Science子刊:磁驱动折叠机器人,3D打印仅需20分钟
文章出处:【微信号:AI_era,微信公众号:新智元】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐






 工商网监
工商网监
评论