 如何使用AI、机器人和大数据增加FCR
如何使用AI、机器人和大数据增加FCR
基于笔者在2018年4月的专栏“使用人工智能,机器人,大数据和分析来减少对支持的需求,作为客户体验(CX)领导者面临的七大挑战之一,今天我将讨论如何面对第二个挑战,即提高首次联络解决率(FCR)。
人工智能,机器人,大数据和分析的强大功能现在使我们能够实现“我们如何在多个渠道和接触点创建和维持一致且令人敬畏的客户体验”这一整体目标,从而提高可持续收入,实现更高利润率,并维持更高水平的客户满意度和忠诚度。
让我们深入探讨第二个挑战,即提高FCR。
经过研究证实,联络中心和其他支持功能的首次联络解决率(FCR)是客户满意度的最大驱动因素。然而,大多数公司过分依赖平均FCR等点数统计,他们忽略了今天客户开始查询或在线搜索支持的事实,在IVR系统中失败的事实,然后他们才会通过电话、电子邮件或聊天来联系客户服务代表。想一想:如果客户无法在网上得到他们想要的东西,并且在IVR遭到挫折,那么他们与座席的互动是第三次接触=非常不满意,而且代价高昂!
客户在座席级别了解FCR会不会更好,更令客户满意(哪些座席比其他座席有更高的解决率,哪些座席不会产生重复联络)?并找出第一次难以解决哪些问题,产生重复联络?并分析客户在网站上启动的FCR,并尽可能多地解决这些交互?最后一点还涉及我之前关于减少对联络中心需求的专栏,并在我的第一本书“最佳服务是无服务”和我的第二本书“客户规则”的关键部分中整齐地联系起来!
在这篇文章中,我将不讨论如何定义和改进IVR遏制,因为还有很多其他的地方可以找到方法。为什么增加FCR如此困难的一些原因,特别是在我提出的全渠道基础上,包括:
(1) 渠道通常由不同的团体或职能部门“拥有”;
(2) 渠道发展不协调;
(3) 渠道报告同样不协调,存放在不同的数据库中;
(4) FCR没有单一的定义;
(5) 我们经常依赖FCR的“平均值”,就像处理时间(AHT)等许多其他指标一样,而不是深入到座席级别或问题级别上。
最后一条是因为缺乏足够精确的数据来预测绩效,因为座席加入,被培训或离职,并且使问题或原因或多或少地变得复杂。
然而,通过使用AI,机器人,大数据和分析,解决这五个原因并跟踪FCR的持续增长变得更加容易。我将回顾解决这个关键问题的五个步骤:“我们如何预测重复接触;第一次完全解决它们;并专注于开始重复接触过程的问题,原因代码和座席(或创建滚下山的”雪球“),以及能够解决重复接触的过程和座席(或”融化雪球““)?”
步骤1=在每个渠道和跨渠道定义FCR
正如所指出的那样,对于FCR没有一致的定义,并且周围的内容被称为渠道不同的东西(网络支持和IVR支持的“遏制”,联络中心的FCR平均值)。让我们首先使用相同的术语来表示重复的,未解决的联系人(“雪球”);在网站上开始客户启动的地方;并发送平均值以达到座席和问题级别。我们可以通过多种方式定义FCR,最受欢迎的是“同一个客户在7天内没有再次与我们联系”;然而,通常引用的“联系人”是在联络中心,而不是在所有渠道上,也不是从网络上开始。因此,让我们将FCR定义为“同一客户没有因为任何渠道中的同一问题在4天内再与我们联系,”,更严格的时间表等同于客户更大程度的不耐烦。
步骤2=在座席和问题级别收集FCR数据点
这一步骤大大提升了大数据的力量,以“混搭”无数的数据源,并整理出具有最高预测价值的数据源。这是我们在所有问题上击倒“平均”FCR和整体FCR的地方;相反,我们需要收集所有渠道,座席和问题的数据点,问题=客户语言中的一组有限的“原因代码”,例如“我的退款在哪里?”或“我如何获得另一个过滤器?”您会发现该网站的FCR非常低(我们经常看到平均网络支持FCR约为30%!),值得密切关注,使网络支持变得简单。您会发现某些问题的FCR非常低,可能是因为政策混乱(参见步骤4),有些问题可能接近100%FCR,因此不太注意修复。
通过构建一个输入--输出表来显示哪些座席解决问题,哪些不解决问题,您最终可以超越平均值并将座席汇总到他们的团队中以生成基于管理员的FCR结果。在这里你会看到一些座席的FCR低于50%,拉低了整体平均FCR,可能是因为培训不足(参见步骤4),有些几乎是完美的100%,值得你持续保持对他们的关注。
步骤3=在座席和问题级别可视化FCR数据
现在是有趣的部分......将粒状FCR数据点加载到清晰且可操作的模型中。几年来,我的团队一直在使用Microsoft PowerB I,Qlik或Tableau等工具构建这些模型,还有其他可用的可视化工具。最好将输入,趋势视图和“所有者”显示与所有者=负责开发或改进影响FCR的流程和系统的高管结合起来。
步骤4=测试预测模型以增加FCR
通过步骤2中发现的一些假设,使用AI,您可以找到FCR可能驱动程序的原因和结果,例如重新设计的Web支持页面,新培训,简化的知识共享页面以及对座席的反馈(以便每个人都可以看看他们的工作如何影响客户满意度)。您还可以开始预测哪些客户和问题可能是雪球,使劳动力管理能够将他们路由到更专业的座席那里,这些座席具有融合雪球的成熟技能。
第5步=庆祝成功(并推下加速器)!
在最后一步中,您将能够识别能够解决更多联系人的座席,而不是送雪球下坡,开发人员能够增加WebFCR,以及可视化专家能够将所有这些都集中在一起。然后,您可以从这些成功中学习,并建立在它们之上,进入持续改进的良性循环当中。
通过遵循这五个步骤并使用AI,机器人,大数据和分析,您将增加FCR并提高客户满意度。你还会:
避免在座席和问题级别使用更精确的数据点的“平均值”瘟疫;
降低客户支持成本;
让导致问题的“所有者”深入了解解决方法并采取最佳行动。
-
机器人
+关注
关注
206文章
27033浏览量
201383 -
AI
+关注
关注
87文章
26443浏览量
264038 -
大数据
+关注
关注
64文章
8649浏览量
136587
原文标题:如何使用AI,机器人和大数据提高首次联络解决率
文章出处:【微信号:ctiforumnews,微信公众号:CTI论坛】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
并联机器人和串联机器人的区别是什么?
协作机器人和工业机器人区别在哪?
富唯智能机器人集成了协作机器人、移动机器人和视觉引导技术
NVIDIA Isaac平台为AI机器人开发提供支持

机器人和变位机怎么协调运行
ai人工智能机器人
爬行机器人和爬壁机器人的区别


传感器、大数据、机器学习、人工智能和机器人如何彼此影响?

重新定义AI性能,为您的机器人和自动驾驶解决方案带来巨大变革
协助机器人和工业机器人的区别 协作机器人的工作原理
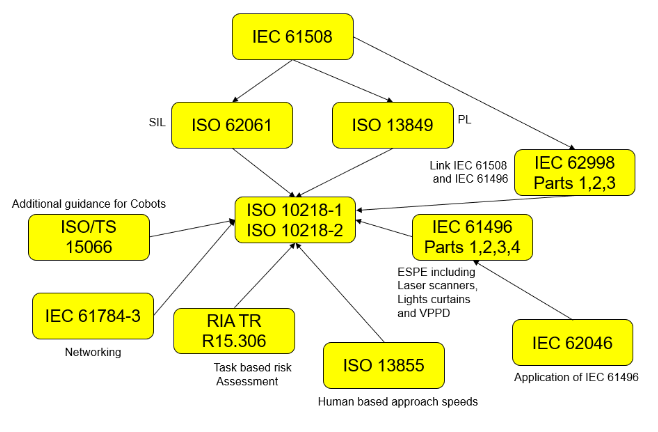
与工业机器人、协作机器人和移动机器人最相关的功能安全标准





 工商网监
工商网监
评论