 ADXRS角速度检测陀螺仪的原理和构造及电路设计实现
ADXRS角速度检测陀螺仪的原理和构造及电路设计实现

一、引言
陀螺仪作为一种惯性测量器件,是惯性导航、惯性制导和惯性测量系统的核心部件,广泛应用于军事和民用领域。传统的陀螺仪体积大、功耗高、易受干扰,稳定性较差,最近美国模拟器件公司推出了一种新型速率陀螺芯片ADXRS,它只有7mm×7mm×3mm大小,采用BGA-32封装技术,这种封装至少要比任何其他具有同类性能的陀螺仪小100倍,而且功耗为30mW,重量仅0.5g,能够很好的克服传统陀螺仪的缺点。由ADXRS芯片组成的角速度检测陀螺仪能够准确的测量角速度,此外还可以利用该陀螺仪对角度进行测量,实验取得了良好的结果。
二、陀螺仪的原理和构造
ADXRS系列陀螺仪是由美国模拟器件公司制造,采用集成微电子机械系统(iMEMS)专利工艺和BIMOS工艺的角速度传感器,内部同时集成有角速率传感器和信号处理电路。与任何同类功能的陀螺仪相比,ADXRS系列陀螺仪具有尺寸小、功耗低、抗冲击和振动性好的优点。
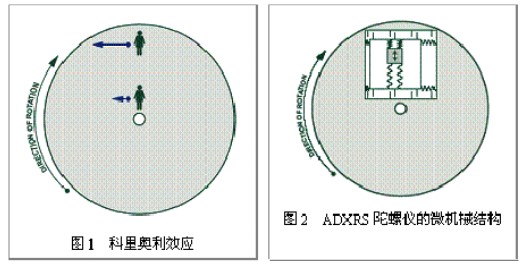
1、科里奥利加速度
ADXRS系列陀螺仪利用科里奥利(Coriolis)加速度来测量角速度,科里奥利效应原理如图1所示。假设某人站在一个旋转平台的中心附近,他相对地面的速度用图1箭头的长度所示。如果移动到平台外缘的某一点,他相对地面的速度会增加,如图1较长的箭头所示。由径向速度引起的切向速度的速率增加,这就是科里奥利加速度。设角速度为w科里奥利加速度的一半,另一般来自径向速度的改变,二者总和为2wv旋转平台必须施加一个大小为2Mwv科里奥利加速度,并且该人将受到大小相等的反作用力。的力来产生。如果人的质量为M,该,平台半径为r,则切向速度为wr,如果以速度v沿径向r移动,将产生一个切向加速度wv,这仅是
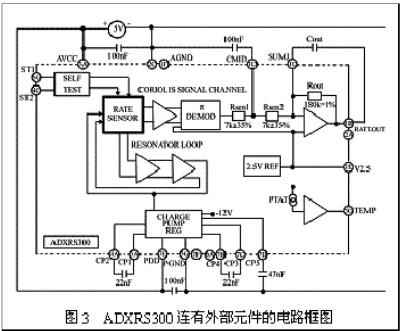
陀螺仪通过使用一种类似于人在一个旋转平台移出或移入的谐振质量元件,利用科里奥利效应来测量角速度。图2示出了ADXRS系列陀螺仪完整的微机械结构,陀螺仪通过附着在谐振体上的电容检测元件测量谐振质量元件及其框架由于科里奥利效应产生的位移。这些电容检测元件都是由硅材料制成的横梁,它们与两组附着在基片上的静止硅横梁互相交叉,因而形成两个标称值相等的电容器。由角速度引起的位移在该系统内产生一个差分电容。如果弹簧的弹性系数为K2wv M。如果总电容为C2wv,它直接与该角速度成比例。这种关系的逼真度在实际应用中非常好,其线性误差小于0.1%。 MC/gK,硅横梁的间距为g,则差分电容为/K,那么反作用力造成的位移为
2、陀螺仪的构造以及电路的实现
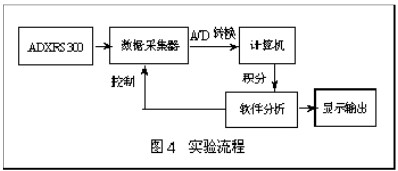
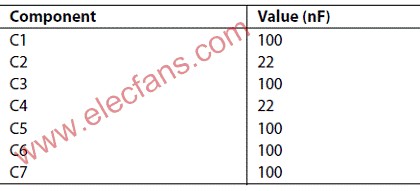
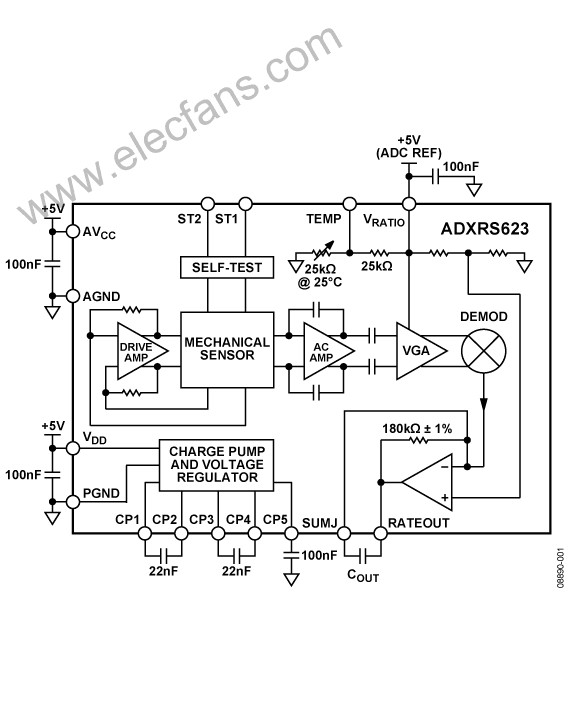
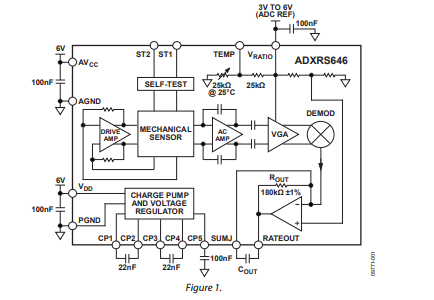
ADXRS系列陀螺仪的外围尺寸为7mm×7mm×3mm,采用BGA-32封装技术,有ADXRS150和ADXRS300两种型号,它们的功能电路完全相同,唯一不同在于前者的量程为±150°/s,后者的量程为±300°/s。图3显示了ADXRS300的内部电路结构和外围电路,其中外围电路主要是电容和电阻组成。
引脚AVCC接5V电源电压,22nF的泵浦电容用于产生12V的泵浦电压以供部分电路使用。测得的角速度以电压形式在引脚RATEOUT输出,0°/s时输出电压为2.5V,RATEOUT与引脚SUMJ之间并联一个电阻RoutADXRS300的角速度响应带宽,-3dB频率由下式决定:和电容Cout,从而组成低通滤波器用于限制
fout = 1 / (2 π • Rout • Cout) (1)
内部电路的Rout180kΩ,可以从外部给RoutΩ//RextADXRS300的量程为±300°/s,可以在RATEOUT和SUMJ引脚之间给Rout300 kΩ的电阻可以使量程增大50%,但是这需要对电路重新调零,调零时在SUMJ引脚处外接一个电阻RnullRATEOUT的零点是2.5V,但角运动范围不对称时,按下式计算:到地或电源正极,对称角运动情况下并联一个电阻来增大量程,例如并联一个,从而调整角速率响应带宽。并联一个电阻Rext,使得Rout=180k为

三、实验过程和测量结果
ADXRS300陀螺仪直接的用途就是做角速度测量仪,此外也可以用于测量物体旋转角度—对陀螺仪的输出结果积分,所得的数值即为角度。
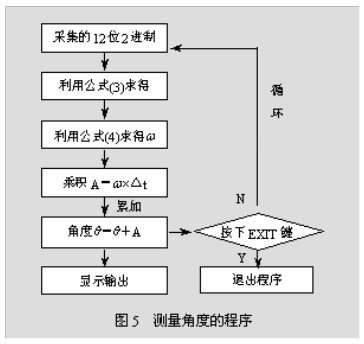
本实验即用ADXRS300陀螺仪测量角度,通过ADXRS300角速度测量仪测量旋转物体的转动角速度(注意:陀螺仪可以以任何角度安装在旋转物体的任何地方,只要测量使陀螺仪旋转轴和所要测量的轴平行即可),再对角速度积分就是我们所要的角度了。根据此原理,先把陀螺仪的输出通过数据采集器送入PC机中,再用软件进行积分并最终显示结果。具体流程如图4。
1、硬件设计
测量角度的具体方法是把ADXRS300陀螺仪固定在由步进电机驱动的圆盘上,由圆盘带动陀螺仪转动,陀螺仪的输出电压由F-5101数据采集控制器进行A/D转换。F-5101的输入电压范围为-5V~5V,A/D转换位数为12位,转换速度为25ms,适用于本实验的数据采集。
F-5101通过打印口与计算机相连,占用主机378H和379H两个I/O端口。主机通过写378H向F-5101送入操作状态,读379H得到A/D转换的数据。
系统的供电电压为220V,需要通过AC220B05-1W5型电源模块把220V交流电转换为5V直流电供ADXRS300陀螺仪使用。
2、软件设计
读取陀螺仪的输出电压值,换算成角速度并进行积分,最终显示结果这一步骤通过Visual Basic程序来实现。从计算机379H端口读取的数值为12位2进制数,利用公式
Vout10× (A×16 + B + C / 16)×4096 – 5 (3)
可以把12位二进制数转换为十进制数,从而求得陀螺仪的实际输出电压。其中Vout12位二进制数的高4位、中4位和低4位。电压值换算成角速度由下式决定:设角速度为w,则:为输出电压,A,B,C分别为
w = (Vout -V0) / 5mV /°/s (4)
其中5mV/°/s为ADXRS300陀螺仪的灵敏度,V2.5V。0为陀螺仪静止时的输出电压,一般为积分的主要步骤是用角速度w5。乘以程序运行一次所用的时间△t,循环运行程序,对每次的乘积进行累加,并实时送出累加结果,该结果即为测得的物体转过的角度,程序流程如图
3、实验结果
表1列出了陀螺仪转动±90°和±180°这四种情况的输出结果。
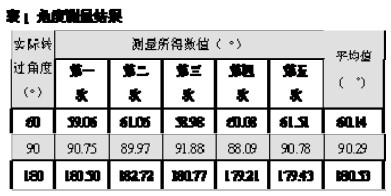
实验结果表明:角度相对误差小于0.5%,有较高的精度。其中误差来源主要包括:
程序运行一次所用的时间△t过长,造成对角速度的积分不精确,这是产生误差的主要来源。解决的方法是尽量避免冗长的程序语句,使用运行速度较快的计算机或者采用更精确的算法。
数据采集A/D转换时可能产生的误差,造成所积分的角速度不准确。
四、结论
随着微机械加工工艺和陀螺仪的设计技术水平不断提高,角速度传感器正朝着微型化、集成化的方向发展,外形更小巧,测量更精确,功能更强大,价格更低廉的陀螺仪已经成为可能。本文介绍的ADXRS角速度检测陀螺仪体现了这方面的特点,它尺寸小,功耗低,抗冲击和振动性好,电路结构简单,能精确测量转动物体的偏航角速度,适用于各种惯性测量系统,是陀螺仪技术的一个飞跃。
-
封装
+关注
关注
128文章
9139浏览量
147862 -
陀螺仪
+关注
关注
44文章
873浏览量
101070 -
导航
+关注
关注
7文章
571浏览量
43723
发布评论请先 登录
急急急~!关于陀螺仪产生的角速度怎么转换成脉冲的问题
ADXRS453陀螺仪的测试角度
陀螺仪传感方案ADXRS6 24
如何检测陀螺仪是否坏了
通过陀螺仪测得的角速度对时间求积分的公式对吗
基于ADXRS624设计的陀螺仪传感技术
偏航速率陀螺仪ADXRS623
MEMS陀螺仪应用案例:利用ADI ADXRS450检测角速度

陀螺仪三轴角速度转姿态角速度
ADXRS646具有高稳定性、低噪声和振动抑制特性的偏航角速度陀螺仪技术手册
ADXRS649快速启动、具有振动抑制特性的±20,000°/s偏航角速度陀螺仪技术手册
ADXRS624角速度陀螺仪技术手册





 工商网监
工商网监
评论