 使用ADI FRC IMU板的“自主”模式
使用ADI FRC IMU板的“自主”模式
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
adi
+关注
关注
143文章
45776浏览量
241062
发布评论请先 登录
相关推荐
北微推出车规级IMU芯片项目,推动国产化进程
此项目凭借高校教授智库、行业专家与骨干团队的合力,致力于关键工艺突破、新型结构和关键封装设计与实现,以及核心ASIC设计与流片,旨在打造全国产且具备自主知识产权的IMU芯片。
严苛工作环境下IMU的最佳选择——爱普生M-G364及M-G354
的IMU产品。随着自主精密农业机械、智能施工机械和无人机应用的快速发展,小型高性价比、高精度定位装置的需求与日俱增,爱普生推出了严苛环境下IMU的最佳选择——爱普生M

M-G370PDF1(IMU)
一般描述 M-G370PDF1是一个小的形状因子惯性测量单元(IMU),具有6个自由度:三轴角速率和线性加速度,并提供了高稳定性和高精度的测量能力与使用高精度补偿技术。各种校准参数被存储在IMU
发表于 01-11 17:00
•0次下载

ADIS16IMU2上的两个电容是多大的,两排管脚什么型号?
ADIS16 IMU2和ADIS1644X/FLEX在哪可以买到,自己做的话两个电容是多大的,两排管脚什么型号,有没有关于ADIS16IMU2的详细资料
发表于 12-29 07:14
导远IMU5104成为首个获得ISO 26262功能安全认证的车载IMU模组产品
12月27日,导远电子获得DEKRA德凯颁发,国内首张高精度定位IMU模组ISO 26262 ASIL B功能安全产品认证证书,标志着导远IMU5104成为首个获得ISO 26262功能安全认证的车载IMU模组产品。
【ELF 1开发板试用】+ 7.0 利用icm20607 完成IMU开发【算法】
IMU开发
ELF 1搭载了六轴运动跟踪传感器 ICM20607,集成了三轴加速度计和三轴陀螺仪,那么我们就可以简单的进行开发,将角速度和加速度的数值进行数据融合,计算出开发板当前的姿态,也就是俯仰
发表于 12-13 15:48
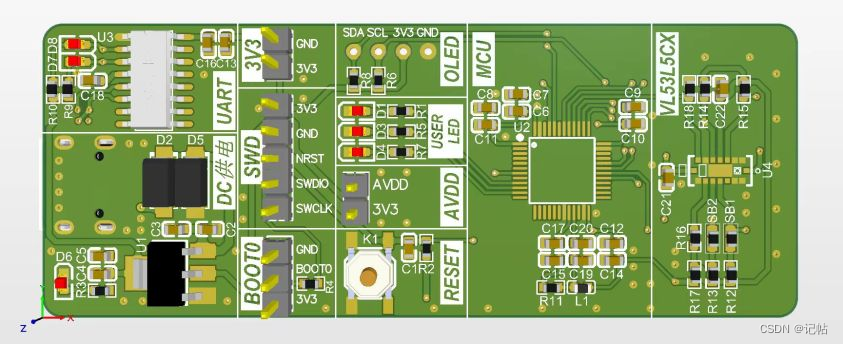
VL53L5CX驱动开发(2)----设置自主模式
"自主模式"(Autonomous mode)通常指的是设备或系统能够在没有外部输入的情况下独立完成任务。对于传感器,如VL53L5,自主模式可能意味着传感器可以独立、定期地进行测量,而不需要来自主控制器或主机的每一次单独指令。
百亿市场!高性能MEMS IMU,将成自动驾驶的下一个风口【附报告下载】
亿元。目前国产高性能三轴芯片自主可控已突破,放量在即百亿市场有望迎来爆发 ○IMU(惯性测量单元)通过测量物体加速度和角速度的变化来推算出物体在三维空间中的位置和姿态。目前高精度MEMS IMU民用市场,主要应用场景包括高精度自
IMU/GNSS与车体外参标定
的外参问题经常是IMU/GNSS与车体坐标的外参、Lidar和Camera的外参、Lidar和Lidar的外参、Lidar和IMU/GNSS的外参。 离线外参标定 1.1 IMU/GNSS与车体外参标定 这个


FRC-EP系列——汽车数据一站式管家
FRC-EP系列产品主要面向汽车动力总成测试的客户,主要应用方向为残余总线仿真及网关。本文将详细介绍FRC-EP的产品特性和应用场景。

传感需求多变,MEMS器件集合体IMU如何应对
电子发烧友网报道(文/李宁远)在运控领域,IMU一直都是核心的传感器件,想要实现精准的运动,IMU提供的速度信息是必不可少的。尤其是近年来自动驾驶、无人驾驶等话题的高涨,IMU覆盖的应用也是越来越

一种易于实现的无外部设备IMU校准方法
在阅读论文 《A Robust and Easy to Implement Method for IMU Calibration without External Equipments》的时候了解






 工商网监
工商网监
评论