 如何使用L298N和Arduino板控制直流电机
如何使用L298N和Arduino板控制直流电机
在这个Arduino教程中,我们将学习如何使用Arduino控制直流电机。我们来看看控制直流电机的一些基本技术,并通过两个例子,学习如何使用L298N电机驱动器和Arduino板来控制直流电机。
在以往的文章中,我们知道可以通过简单地控制输入电压来控制直流电机的速度,最常用的方法是使用PWM信号。延伸可阅读:PWM
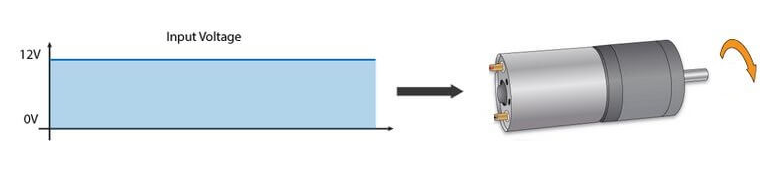
PWM控制直流电机
使用PWM控制直流电机
PWM,即脉冲宽度调制技术,它是一种允许我们通过调整进入电机的电压的平均值,通过高电平和低电平的持续时间来控制电机运动的技术。平均电压取决于占空比,即信号在一段时间内打开的时间与关闭的时间之比。
脉冲宽度调制技术
因此,根据电机的大小,我们可以简单地将ArduinoPWM输出连接到晶体管的底座或MOSFET的栅极,通过控制PWM输出来控制电机的速度。低功率ArduinoPWM信号开关在MOSFET上,通过PWM信号开关可驱动大功率电机。
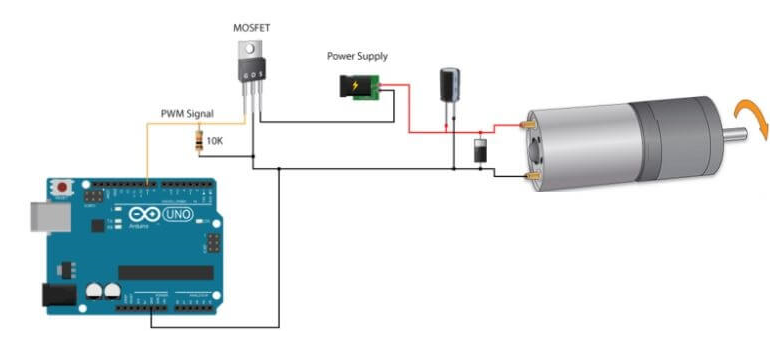
ArduinoPWM控制直流电机
H桥直流电机控制
另一方面,为了控制电机的旋转方向,我们只需要对电流流过电机的方向进行逆转,最常用的方法是用H桥。一个H桥电路包含四个开关元件,晶体管或mosfet,形成一个类似于H的结构。通过同时激活两个特定的开关,我们可以改变电流流动的方向,从而改变电机的旋转方向。
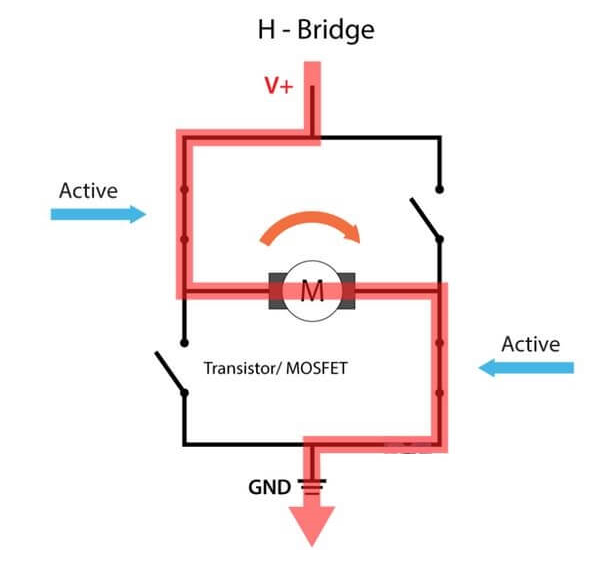
H桥的结构
所以,如果我们把PWM和H桥这两种方法结合起来,我们就可以完全控制直流电机的运动了。有许多直流电机驱动器都具有这些特性,L298N就是其中之一。
L298N驱动模块
L298N是一个双H桥电机驱动器,它允许在同一时间,在速度和方向上对两个直流电机进行控制。该模块可以驱动电压在5–35V之间的直流电机,峰值工作电流可达2A。
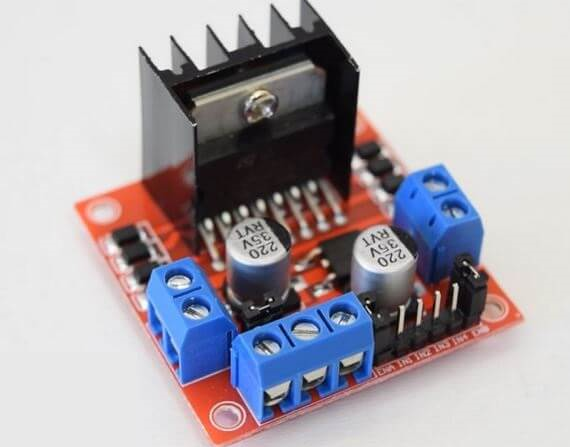
L298N驱动模块
让我们仔细看看L298N模块的接口定义,并解释它是如何工作的。该模块包括两个电机(A、B)的连接端子、接地GND端子、电机的VCC和一个可作为输入或输出的5V引脚,这主要取决于在电机VCC上使用的电压,具体使用请往下看。
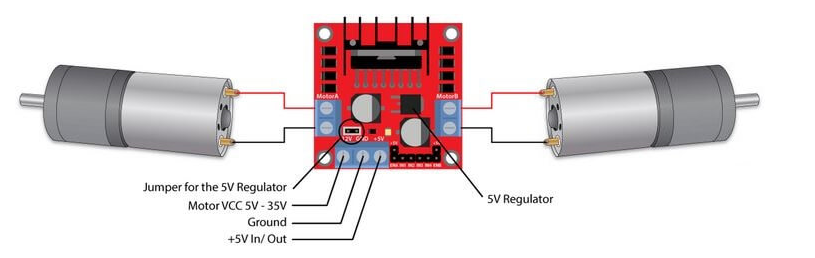
该模块有一个板载5V调节器,可通过跳线启用或禁用。如果电机供电电压低于12V,我们可以启用5V调节器,5V引脚可以作为输出,例如为我们的Arduino板供电;但是如果电机电压大于12V,我们必须断开跳线,因为这些电压会对板载5V调节器造成损坏。在这种情况下,5V引脚将作为输入,因为我们需要连接到5V电源,以便IC正常工作。
使用中这个集成电路的电压降大约是2V。例如,如果我们使用12V电源,电机端子的电压大约是10V,这意味着我们无法从12V直流电机中获得最大速度。
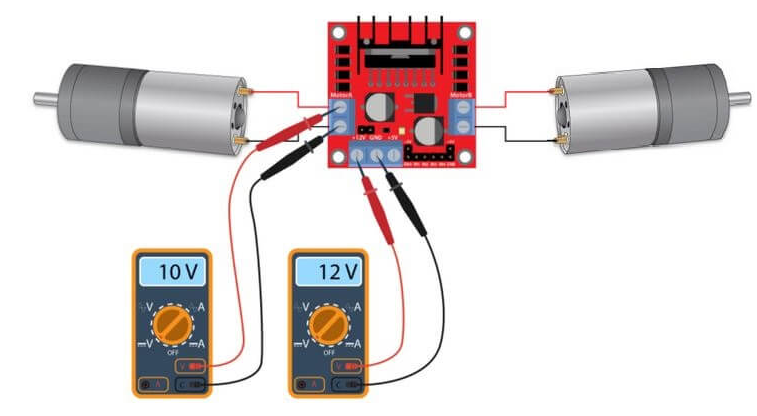
L298N的电压降
接下来是逻辑控制信号输入。使能A和使能B引脚用于使能和控制电机的速度。如果跳线出现在这个引脚上,电机将被启用并以最大速度工作,如果我们移除跳线,我们可以将PWM输入连接到这个引脚上,以这种方式控制电机的速度。如果我们把这个插针接在地GND上,马达就会不工作。
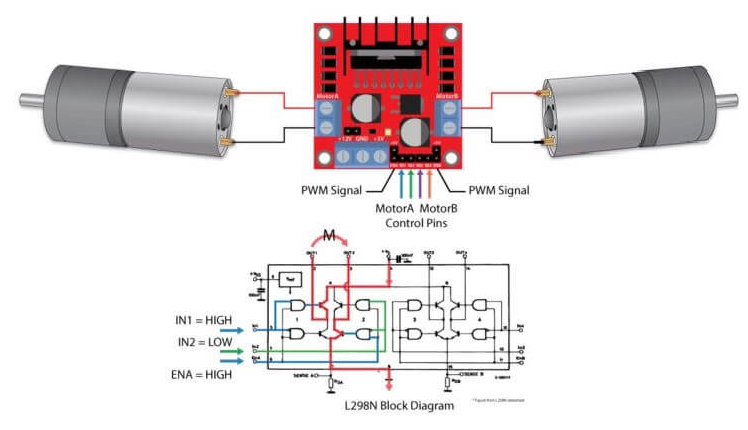
L298N的逻辑输入控制
其中,输入1和2针用于控制电动机A的转动方向,输入3和4用于控制电机B。这些插针实际上控制的是H桥的开关L298N芯片。它的控制原理是:当输入1是低,2是高马达A会向前转动,反之亦然,如果输入1高2低电机A将反方向旋转。如果两个输入都相同,无论高低电平,电机A都会停止。同样的道理也适用于输入3和4。
Arduino上L298N的使用
现在让我们做一些实际的测试。在第一个示例中,我们将使用电位器控制电机的速度,并使用一个按钮改变旋转方向。这是电路原理图。
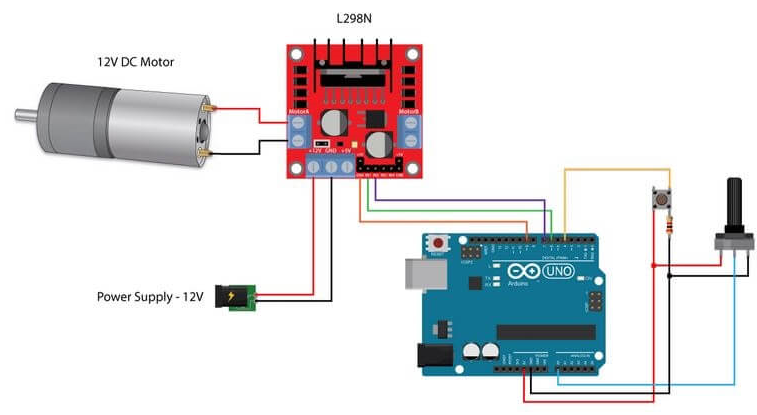
Arduino上L298N的使用
测试元件包括:一个L298N驱动器,一个直流电机,一个电位器,一个按钮开关和一个Arduino板以及12V电源。
Arduino 控制代码如下
/* Arduino DC Motor Control - PWM | H-Bridge | L298N - Example 01
*/
#define enA 9
#define in1 6
#define in2 7
#define button 4
int rotDirection = 0;
int pressed = false;
void setup() {
pinMode(enA, OUTPUT);
pinMode(in1, OUTPUT);
pinMode(in2, OUTPUT);
pinMode(button, INPUT);
// Set initial rotation direction
digitalWrite(in1, LOW);
digitalWrite(in2, HIGH);
}
void loop() {
int potValue = analogRead(A0); // Read potentiometer value
int pwmOutput = map(potValue, 0, 1023, 0 , 255); // Map the potentiometer value from 0 to 255
analogWrite(enA, pwmOutput); // Send PWM signal to L298N Enable pin
// Read button - Debounce
if (digitalRead(button) == true) {
pressed = !pressed;
}
while (digitalRead(button) == true);
delay(20);
// If button is pressed - change rotation direction
if (pressed == true & rotDirection == 0) {
digitalWrite(in1, HIGH);
digitalWrite(in2, LOW);
rotDirection = 1;
delay(20);
}
// If button is pressed - change rotation direction
if (pressed == false & rotDirection == 1) {
digitalWrite(in1, LOW);
digitalWrite(in2, HIGH);
rotDirection = 0;
delay(20);
}
}
代码解释:首先我们需要为程序定义引脚和一些变量。在 setup 部分,我们需要设置引脚模式和电机的初始旋转方向。在 loop 部分,我们首先读取电位器的值,然后将我们从电位器中得到的值,0到 1023 映射到PWM信号值 0 到 255,也就是PWM信号从0到100%的占空比。然后使用 analogWrite() 函数,发送PWM信号到L298N板的使能端,从而实现电机的驱动。接下来,检查是否按下了按钮,如果是,将通过反方向设置输入1和输入2的状态来改变电机的旋转方向。这个按钮将作为切换按钮工作,每次我们按下它,它都将改变电机的旋转方向。
Arduino采用L298N驱动机器人小车
如果我们理解了上面的知识,下面我们就可以制造自己的Arduino机器人小车了。下面是电路原理图:
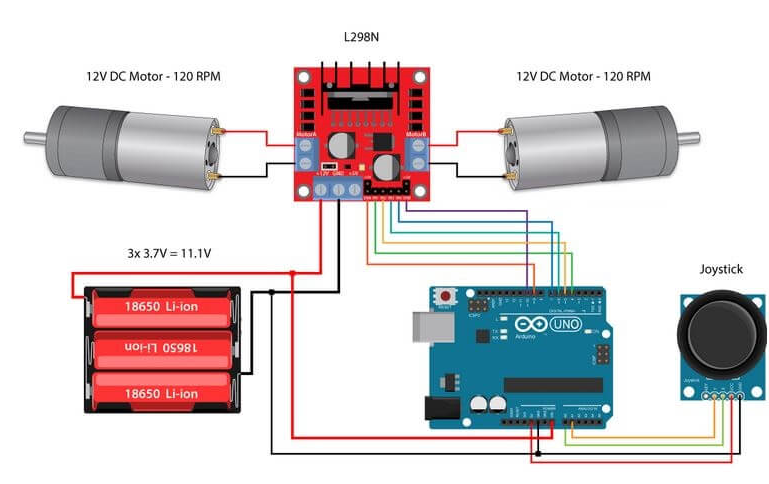
Arduino采用L298N驱动机器人小车
我们需要两个直流电机,L298N驱动器,一个Arduino板和一个操纵杆Joystick。在电源方面,我选择了三节3.7V的锂离子电池作为电源,电压约11V。小车采用3毫米的胶合板做了底盘,用金属支架把电机固定在上面,把轮子连在电机上,底盘的前面安装了一个转向轮。在网上有成品底盘,例如:智能小车底盘
现在让我们看看Arduino代码,看看它是如何工作的。
int xAxis = analogRead(A0); // Read Joysticks X-axis
int yAxis = analogRead(A1); // Read Joysticks Y-axis
在loop部分定义了引脚之后,我们首先读取操纵杆X和Y轴的值。操纵杆实际上是由两个电位器连接到Arduino的模拟输入,它们的值从0到1023。当操纵杆保持在中心位置时,电位器或轴的值都在512左右。
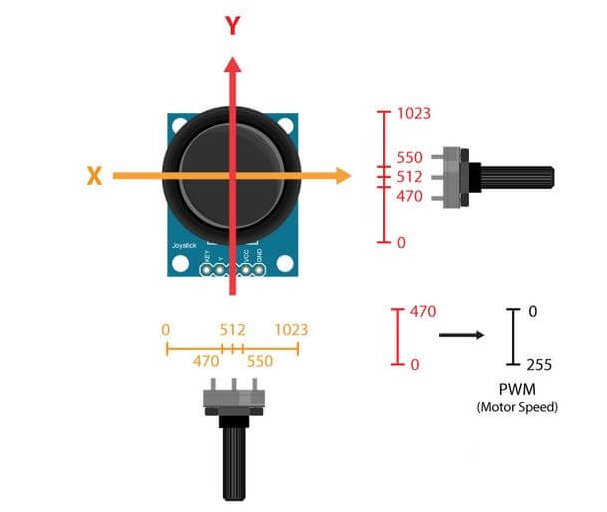
操纵杆Joystick 模块的值
我们将增加一点公差,以470到550的值为中心。所以如果向后移动操纵杆的Y轴,数值低于470,将使用四个输入引脚将两个电机的旋转方向设置为向后。然后,我们将从470到0的下降值转换为PWM从0到255的上升值,这实际上是控制电机的速度。
// Y-axis used for forward and backward control
if (yAxis < 470) {
// Set Motor A backward
digitalWrite(in1, HIGH);
digitalWrite(in2, LOW);
// Set Motor B backward
digitalWrite(in3, HIGH);
digitalWrite(in4, LOW);
// Convert the declining Y-axis readings for going backward from 470 to 0 into 0 to 255 value for the PWM signal for increasing the motor speed
motorSpeedA = map(yAxis, 470, 0, 0, 255);
motorSpeedB = map(yAxis, 470, 0, 0, 255);
}
类似的,如果我们向前移动操纵杆的Y轴,数值超过550,我们将设置电机向前移动,并将读数从550到1023转换为PWM值从0到255。如果操纵杆保持在它的中心,电机的速度将为零。接下来,让我们看看如何使用X轴来控制小车左右转动 。
// X-axis used for left and right control
if (xAxis < 470) {
// Convert the declining X-axis readings from 470 to 0 into increasing 0 to 255 value
int xMapped = map(xAxis, 470, 0, 0, 255);
// Move to left - decrease left motor speed, increase right motor speed
motorSpeedA = motorSpeedA - xMapped;
motorSpeedB = motorSpeedB + xMapped;
// Confine the range from 0 to 255
if (motorSpeedA < 0) {
motorSpeedA = 0;
}
if (motorSpeedB > 255) {
motorSpeedB = 255;
}
}
首先,需要把X轴的读数转换成0到255之间的速度值。对于向左移动,我们使用这个值来降低左电机速度并增加右电机速度。在这里,由于算术函数,我们使用两个额外的“if”语句来限制电机速度范围从0到255。

机器人小车的左转和右转
同样的方法也适用于向右移动小车。
根据所施加的电压和采用电机本身的不同,在较低的速度下,电机无法启动,并产生嗡嗡声。在我本文的例子中,如果PWM信号的值低于70,电机就无法启动。因此,使用这两个if语句,我实际上把速度限制在70到255之间。最后,发送电机速度控制值或PWM信号到L298N驱动器的使能引脚。
// Prevent buzzing at low speeds (Adjust according to your motors. My motors couldn't start moving if PWM value was below value of 70)
if (motorSpeedA < 70) {
motorSpeedA = 0;
}
if (motorSpeedB < 70) {
motorSpeedB = 0;
}
analogWrite(enA, motorSpeedA); // Send PWM signal to motor A
analogWrite(enB, motorSpeedB); // Send PWM signal to motor B
最后附上Arduino机器人小车示例的完整代码:
*/
#define enA 9
#define in1 4
#define in2 5
#define enB 10
#define in3 6
#define in4 7
int motorSpeedA = 0;
int motorSpeedB = 0;
void setup() {
pinMode(enA, OUTPUT);
pinMode(enB, OUTPUT);
pinMode(in1, OUTPUT);
pinMode(in2, OUTPUT);
pinMode(in3, OUTPUT);
pinMode(in4, OUTPUT);
}
void loop() {
int xAxis = analogRead(A0); // Read Joysticks X-axis
int yAxis = analogRead(A1); // Read Joysticks Y-axis
// Y-axis used for forward and backward control
if (yAxis < 470) {
// Set Motor A backward
digitalWrite(in1, HIGH);
digitalWrite(in2, LOW);
// Set Motor B backward
digitalWrite(in3, HIGH);
digitalWrite(in4, LOW);
// Convert the declining Y-axis readings for going backward from 470 to 0 into 0 to 255 value for the PWM signal for increasing the motor speed
motorSpeedA = map(yAxis, 470, 0, 0, 255);
motorSpeedB = map(yAxis, 470, 0, 0, 255);
}
else if (yAxis > 550) {
// Set Motor A forward
digitalWrite(in1, LOW);
digitalWrite(in2, HIGH);
// Set Motor B forward
digitalWrite(in3, LOW);
digitalWrite(in4, HIGH);
// Convert the increasing Y-axis readings for going forward from 550 to 1023 into 0 to 255 value for the PWM signal for increasing the motor speed
motorSpeedA = map(yAxis, 550, 1023, 0, 255);
motorSpeedB = map(yAxis, 550, 1023, 0, 255);
}
// If joystick stays in middle the motors are not moving
else {
motorSpeedA = 0;
motorSpeedB = 0;
}
// X-axis used for left and right control
if (xAxis < 470) {
// Convert the declining X-axis readings from 470 to 0 into increasing 0 to 255 value
int xMapped = map(xAxis, 470, 0, 0, 255);
// Move to left - decrease left motor speed, increase right motor speed
motorSpeedA = motorSpeedA - xMapped;
motorSpeedB = motorSpeedB + xMapped;
// Confine the range from 0 to 255
if (motorSpeedA < 0) {
motorSpeedA = 0;
}
if (motorSpeedB > 255) {
motorSpeedB = 255;
}
}
if (xAxis > 550) {
// Convert the increasing X-axis readings from 550 to 1023 into 0 to 255 value
int xMapped = map(xAxis, 550, 1023, 0, 255);
// Move right - decrease right motor speed, increase left motor speed
motorSpeedA = motorSpeedA + xMapped;
motorSpeedB = motorSpeedB - xMapped;
// Confine the range from 0 to 255
if (motorSpeedA > 255) {
motorSpeedA = 255;
}
if (motorSpeedB < 0) {
motorSpeedB = 0;
}
}
// Prevent buzzing at low speeds (Adjust according to your motors. My motors couldn't start moving if PWM value was below value of 70)
if (motorSpeedA < 70) {
motorSpeedA = 0;
}
if (motorSpeedB < 70) {
motorSpeedB = 0;
}
analogWrite(enA, motorSpeedA); // Send PWM signal to motor A
analogWrite(enB, motorSpeedB); // Send PWM signal to motor B
}
-
直流电机
+关注
关注
35文章
1623浏览量
69469 -
Arduino
+关注
关注
184文章
6427浏览量
184834
发布评论请先 登录
相关推荐






 工商网监
工商网监
评论