 无人驾驶技术下放 自带双目的扫地机器人
无人驾驶技术下放 自带双目的扫地机器人
无人驾驶或者自动驾驶是一个比较宽泛的定义,按照国际自动机械工程师学会(SAE)的标准,目前有L0-L5共六个级别。
L1代表辅助驾驶,预警类ADAS功能,比如偏离车道预警;L2代表部分自动驾驶,辅助干预ADAS功能,比如ACC自适应巡航、紧急自动刹车、车道保持辅助;L3代表有条件自动驾驶,在辅助干预的基础上增加了自动加速、自动刹车以及自动转向等;
L4代表高度自动驾驶,这个级别能实现完全没有人类司机,也可以没有方向盘、油门、刹车踏板等,不过限定驾驶区域和环境;L5是理想中的完全自动驾驶,没有司机、方向盘、油门、刹车踏板,并且不限制区域。
从以上定义来看,无论是低阶的L1和L2,还是高阶一些的L3、L4、L5,都需要传感器监控行车环境和行车条件,并且随着档次、段位提升,对传感器的依赖程度越大。
目前很多量产车型都已经拥有了L1、L2的自动驾驶能力,甚至一些厂商已经拥有了L3级别的自动驾驶能力。业界在长时间攻关自动驾驶的技术路径当中,衍生了大量对传感器的应用的掌握,以及在算法、决策层的软件方面的积累,也让其它产业受益良多,尤其是扫地机器人。
乍一看,自动驾驶的汽车和扫地机器人无论从实现难度还是功能方面都有着巨大差别。但是其实两者在避障、路径规划等方面的工作原理其实是有着互通之处和共性,都是通过传感器收集数据,数据传输到处理器决策层规划行走方案。
在汽车领域,自动驾驶需要用的传感器的精度较高,比如多目摄像头、环视摄像头、毫米波雷达、超声波传感器,甚至车舱内的驾驶状态监测摄像头。
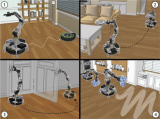
类比到扫地机器人上,以石头扫地机器人T7 Pro为例,它有包含LDS激光雷达、里程计、陀螺仪、悬崖传感器等在内的15种传感器,并且也和无人驾驶汽车一样通过摄像头对周围环境进行AI识别,用以避障和辅助规划路线。
在无人驾驶汽车领域,收集来各类传感器采集的数据同时,还需要对数据加以毫秒级的运算进行分析,才能得到准确、安全的路线。同样在石头扫地机器人T7 Pro上也有一个担负类似角色的大脑——高通平台的处理器(性能相当于骁龙625)领衔构建起了一套AI双目视觉避障系统。
在我们过去的评测体验当中,发现石头扫地机器人T7 Pro已经掌握双目镜头+处理器的协同,通过前置的AI双摄收集环境信息,结合处理器,利用视觉识别技术可以像人眼睛样识别障碍物。
并且石头扫地机器人T7 Pro对不同障碍物采用不同的避障策略,评估避让距离,以兼顾清扫覆盖度和避障成功率:普通障碍物<鞋类/体重秤/吧台椅底座/风扇底座<插线板<一团电源线<粑粑(避障距离越来越大)。
得益于此,在路线规划上,石头扫地机器人T7 Pro相比较传统扫地机器人对环境感知更精准,即使在狭小空间也能拥有准确的判断,快速在障碍当中脱身。
总的来说,过去高高在上的无人驾驶技术在今天并不是无法企及、窥见的神秘领域,曾经寻常的扫地机器人未来也可能将有越来越高的技术含量。
-
智能机器人
+关注
关注
17文章
825浏览量
81324 -
双目视觉
+关注
关注
2文章
34浏览量
14113 -
无人驾驶技术
+关注
关注
2文章
35浏览量
12727
发布评论请先 登录
相关推荐
视觉、激光、结构光?扫地机器人导航避障技术盘点
扫地机器人的工作原理和应用芯片

扫地机器人加装了六轴机械臂!

高精准材质识别:支撑扫地机器人自适应清扫技术

关于扫地机器人的测试方法

输入扫地机器人专用芯片模块电机供电驱动
智能扫地机器人是如何准确清扫全屋的?
扫地机器人停滞不前的原因是什么
我们拆了一款Tof+AI避障的扫地机
扫地机器人液位检测方案





 工商网监
工商网监
评论