 KUKA电伺服焊钳测量原理分析
KUKA电伺服焊钳测量原理分析
user测量程序:
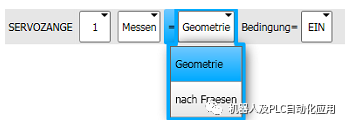
Geometrie:
初始化
在以下情况下必须完成:
•启动时
•每次更换电极后
使用在WorkVisual下的初始化力新上限下配置的力。
nachFraesen:
循环初始化
•循环初始化必须在瓶盖铣削之后进行,使用在WorkVisual中在初始化力盖下配置的力。

焊钳测量USER程序:
P1 =选择钳子(钳子编号)
P2 =技术选择(测量)
P3 =方法-几何/铣削后
P4 =条件-执行命令的条件
例如:
SERVOZANGE 1 Messen= nach Fraesen Bedingung=EIN 测量
VW_SGB_INIT_ADV(TRUE,#SG_PTP,P8,1,#SAME)
VW_SGB_INIT_MAIN(TRUE,#SG_PTP,P8,1,#SAME)
VW_SGB_INIT_MAIN(Condition:IN, MovementType :IN, PointCoord :IN,GunNumber :IN,InitType :IN)
Condition:TRUE条件
MovementType:SG_PTP运动类型
PointCoord:P8 工作点号
GunNumber:1 枪号
InitType: #SAME/#NEW 测量类型:#SAME铣削后测量,#NEW更换电极测量
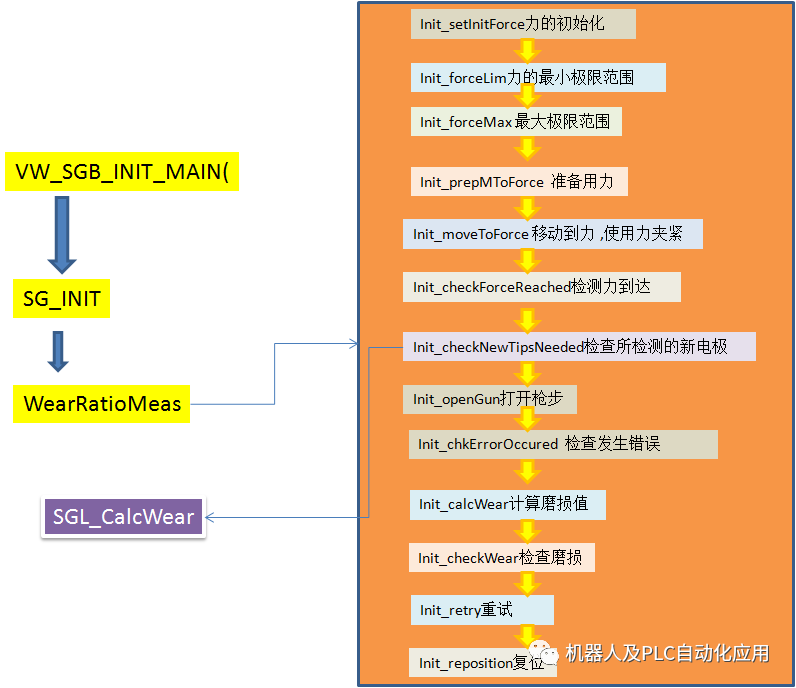
1.SGL_CalcWear 测量损耗
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
伺服
+关注
关注
16文章
607浏览量
40485 -
测量
+关注
关注
10文章
4215浏览量
109732 -
初始化
+关注
关注
0文章
48浏览量
11627
原文标题:KUKA电伺服焊钳测量原理分析
文章出处:【微信号:gh_a8b121171b08,微信公众号:机器人及PLC自动化应用】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
伺服驱动器输出电压的测量方法及注意事项
伺服驱动器是一种将输入信号转换为精确输出位置或速度的电子设备,广泛应用于自动化控制系统中。为了确保伺服驱动器性能的准确性和稳定性,将其输出电压测量至关重要。本文将详细介绍伺服驱动器输出
伺服驱动器输出电压怎么测量
伺服驱动器是一种用于控制伺服电机的设备,它通过输出特定的电压信号来驱动电机转动。因此,测量伺服驱动器的输出电压可以为我们提供有关电机运行状态和性能的重要信息。下面将详细介绍如何
VASS06电伺服更换行指令 “Messen” (测量)实例
首次初始化
必须在下列情况下进行:
• 在调试时
• 每次更换电极帽之后
使用在 WorkVisual 的 新电极帽的初始化作用力(自 KUKA.ServoGun 3.1: 更换端盖后的测量力起)下配置的作用力。

没有有前辈用LabVIEW控制kuka机器人c2的经验?通讯是怎么做到的?
我看NI有Robotics Toolkit for KUKA KR C2的附加包,这个怎么用啊?如何和kuka机器人建立通讯啊?是Tcp接口吗?
发表于 10-21 20:59

伺服焊钳机器人做EMZ的程序分析
外部轴的反馈值的偏差范围不得小于5 ABS取绝对值,因此我们可以认定,焊钳在进行关闭时开口是10mm,不能使理论值和实际值偏差超过1mm
发表于 09-01 10:21
•365次阅读
KUKA机器人电伺服焊钳力的建立过程V2.28
ACTIVATE_FORCE_MODE((6+SG_ExtaxActive), FORCE, SGL_CalcPartPos(SG_CurrentCmd),SGEQ_AFM_ConstSpeedUser)

更换C型焊钳上的变压器
C-50 焊钳上的变压器 C-8000 焊钳上的变压器 第 1 步:切断机器人焊钳电流,释放压力并排出气动元件的气体。 第 2 步:将带焊钳的机器人移至一个安全的维护位置。或者分
KUKA 机器人电伺服焊钳配置
可以通过目录管理单独添加SGB选件包中未包括的目录元素。 必须添加目录元素“ VW_SGB”。 通过文件插入合适的钳子→目录管理 通过拖放将钳子电机从目录插入项目中。该名称通常对应于硬件上的名称(请注意铭牌) 根据配置,将钳子悬挂在单元配置中的机器人法兰上。 机器人制钳的电路如下: 配置焊枪信号 必须配置来自焊枪的多个信号。双击钳子并选择中间显示窗口中的选项卡“ServoGun”。 可以使用以下信号:更改: 外力传感器激活:如果未使

VASS版本的-KUKA机器人的数据提供
...KS_KUKA_DateienTechpaket8.2Basicxxxxxxxxxarchive.zip 机器人后台数据存储在标准档案中,必须恢复到控制器中。






 工商网监
工商网监
评论