如果 CHAR 类型数组的所有数组元素都拥有相同的字符串,则不必单独初始化每个数组元素。忽略右侧的数....

MOVIFIT安全概念包括停用逆变器的24 VDC电源。在STO(安全扭矩关闭)的情况下,电源部分因....
如果没有与选择标准匹配的标识符,则处理DEFAULT块。如果没有DEFAULT块,则不处理任何块,并....

SSL列表读取或SSL部分列表读取的目标区域:?如果仅读取了SSL列表的标题信息,则不能评估DR的值....

可以像计算普通数字一样在 SCL 中计算时间变量,即不需要寻找额外的函数,例如T_COMBINE ,....
在“设备和网络”(Devices & Networks) 编辑器中通过 PROFINET 或以太网组....

基于STEP 5的兼容性,仍然可以使用STEP7 S5定时器与计数器,定时器和计数器是全局的且基于编....

采用间接寻址时,只有程序执行时,用于读或写数值的地址才得以确定。使用这种方法可以减少编程量并使得程序....
以下测试功能可以测试在 GRAPH 中创建的顺序控制系统

该数据块通常会随自己的背景数据块一起被调用。

为了可以在不同的机器人上交替地运行一个设备,需要 IOCTL 命
令 1060 进行解耦。

S7-1200 CPU 使用的存储卡为 SD 卡,存储卡中可以存储用户项目文件,有如下3种功能

通过扩展的 PROFINET 诊断功能,可以实现诊断和参数化集成以太网接口(例如光纤诊断和拓扑配置等....

如果电脑没有安装 TIA PORTAL 软件,但是 CPU 之前激活了 Web 服务器功能,可以通过....
如果设备的IP地址与PG/PC的网卡的IP地址不在同一子网内,必须先给网卡分配额外的IP地址,这个I....

SIMATIC S7- 1500 CPU集成了 PROFINET 接口,该接口除了具备连接 PROF....

S7-1500 CPU 的装载存储区在 SIMATIC 存储卡上。根据以下操作步骤可以确定用户程序所....

随着切换到TIA V17 Update 5,密码强度要求已进行了调整。

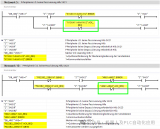
为了使PN/PN耦合器的去分类请求也能动画化,ACK_REQ信号必须连接到网络的“基本功能”=“x”....
算术表达式既可以是一个数字值,也可以是由带有算术运算符的两个值或表达式组合而成。 算术运算符可以处理....
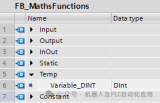
建议在数学函数中不要混用有类型和无类型常量,否则可能会发生不需要的隐式转换,从而导致生成不正确的值....
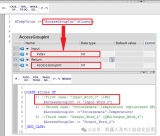
在对话框中,版本号在最后一个位置自动递增。这样可以识别字段中的更改。

使用“拖放”操作将FB_Muster移动到项目库中的文件夹中。
模块FB是用于控制执行器和单元的功能模块或执行某一功能的其他FB的块。

当在数据列表中达成一致时,GLOBAL可用于变量、信号和自定义数据类型编号。
PUBLIC专门用于....
“概述”区域显示所有现有的TOOLS、BASES和外部运动学,每个都在一个单独的选项卡中。

下表描述了如何为下载设置内存保留而不重新初始化。

默认情况下,为 S7 - 1200/1500 的所有新创建的块启用优化块访问。可为 OB、FB 和....

示例:在块上设置内存保留

类型与您在项目中的使用位置相关联。当类型发生变化时,项目中的使用位置可以自动更新。






 工商网监
工商网监