 VASS05机器人2.20系统ProConOS_IO接口解析
VASS05机器人2.20系统ProConOS_IO接口解析
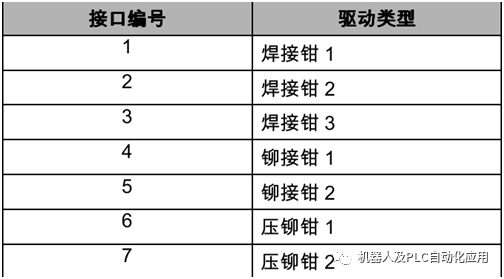
生成文件使用的接口:
接口1
接口2
接口3
接口4
接口5
接口6
接口7
2.选择激活ProConOS_IO,激活软件后开始进行寻找设备IO激活外部轴E1.
IO区域 焊钳1从705开始 焊钳2从865开始, 焊钳3从1025开始.
铆钳1 从1185开始, 铆钳2 从1265 开始. 压铆钳1从 1345开始
压铆钳2 从1425开始.
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
机器人
+关注
关注
206文章
27025浏览量
201380 -
接口
+关注
关注
33文章
7635浏览量
148459
原文标题:VASS05机器人2.20系统ProConOS_IO接口解析
文章出处:【微信号:gh_a8b121171b08,微信公众号:机器人及PLC自动化应用】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
【开源项目】Emo:基于树莓派 4B DIY 能笑会动的桌面机器人
,下面请跟着我的步伐开始组装吧!
注:3D 图纸及代码文末下载。
组装底座
首先,我们将 Micro USB 模块安装在底座上,这将作为机器人的供电接口。
我们将 SW-420 震动传感器放在靠近
发表于 12-26 15:18
LabVIEW的六轴工业机器人运动控制系统
LabVIEW开发六轴工业机器人运动控制系统
本项目开发了一个高效的工业机器人控制系统,重点关注于运动学算法和轨迹规划算法的实现和测试。LabVIEW作为一个关键技术,在项目中扮演了核
发表于 12-21 20:03
ROS让机器人开发更便捷,基于RK3568J+Debian系统发布!
ROS系统是什么
ROS(Robot Operating System)是一个适用于机器人的开源的元操作系统。它提供了操作系统应有的服务,包括硬件抽象,底层设备控制,常用函数的实现,进
发表于 11-30 16:01
【开源资料】使用ESP32C3超简单制作迷你四足机器人
以外,还可以留出来SPI接口,所以还可以给机器人增加了tft的RGB显示屏,机器人也变得有头有脸了。
机器人的外形结构来源于:T站上作者 jasonleung8866 的Q1 lite
发表于 09-21 11:15
ai人工智能机器人
的运营成本、人力成本还在不断提高(如:办公场地的租金、员工的工资、社保公积金、节假日福利等)。
如今的智能电话机器人,每天的电话拨打量可达800-1000通,相比人工提高了3-5倍,大大缩短了名单的筛选
发表于 09-21 11:09
基于Matlab和VR技术的移动机器人建模及仿真
利用 Matlab 建立移动机器人的动力学模型 ,在虚拟现实 (VR )环境下 ,实时仿真移动机器人路径跟踪的运动特性 ,为基于 Internet 的机器人遥操作试验搭建了仿真平台 。 实验结果表明
发表于 09-20 06:24
【IoT毕设】机智云平台+STM32+树莓派的草莓采摘机器人控制系统
本帖最后由 机智小编 于 2023-8-16 17:37 编辑
一、前言
本草莓采摘机器人控制系统是由江西理工大学机械工程专业的程鹏胜设计开发完成。针对某草莓种植基地模块化种植的高架草莓人工
发表于 08-16 17:35
【科普】干货!带你从0了解移动机器人(三) ——自主导航系统及上位机软件设计与实现
发展。在前两篇文章中,我们介绍了移动机器人的基本概念和硬件组成。本文继续深入探讨移动机器人的自主导航系统及上位机软件****设计与实现。
01移动机器人的内载算法
为了实现移动
发表于 06-28 09:36
ProConOS和机器人控制器之间的布尔值交换
$SOFTPLCBOOL[] ProConOS和机器人控制器之间的布尔值交换 借助Mulitprog库KrcExVarLib的功能块,可以从数组变量中读取单个或多个值,也可以将其写入数组变量
如何快速地让机器人投入生产
机器人也是一种设备,它主要内容是完成一个制造的其中一个功能。
制造一个产品,可以分为几个部件。和装配几个部件。
一个部件,可以是一个模具。或者由机器人完成组成一个模具。
机器人主要完成的是一些模具
发表于 06-06 16:18
利用Arduino Nano制作一个四足机器人遇到HC-05蓝牙模块问题,可以用ESP8266替换Arduino吗?
我在 Arduino Nano 的帮助下制作了一个四足机器人。但我经常遇到 HC-05 蓝牙模块的问题。所以现在我正在考虑用 ESP8266 替换 Arduino。谁能帮我这个?
发表于 06-02 08:12
KUKA.ProConOS软件功能简史
ProConOS是一款高性能PLC运行时间引擎,专为基于嵌入式和PC的控制应用而设计。ProConOS已经在驱动系统,RTU,机器人控制器和PLC上安装了超过25万台(是的,甚至有几家
浅谈儿童陪护机器人
儿童陪护机器人越来越受到人们的关注,其中转动控制是其重要组成部分之一。步进电机芯片作为一种常用的控制芯片,被广泛应用于儿童陪护机器人中的转动控制。本文将从步进电机芯片的工作原理、优势和应用场景等方面
发表于 05-11 15:12





 工商网监
工商网监
评论