 机器人主气缸C50气管连接说明
机器人主气缸C50气管连接说明
这次焊钳的气管接错,没有造成焊钳故障报警,但是在焊钳进行夹紧时出现卡顿现象。在作机器人E1轴移动时报拉拽故障。下面让我们分析一下气路。
伺服焊的第七轴(MQB)随动:
机器人运动过程中焊枪可以定位速度可在5% 到100 %之间变化机器人监控运动过程。
(FESTO伺服焊钳控制器)
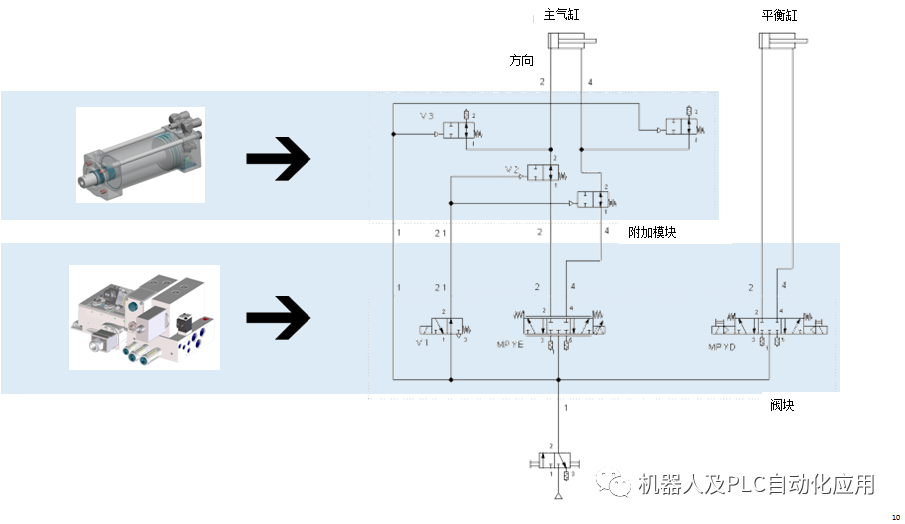
(气伺服焊钳气路图, 图中的MSEB阀与实际工作原理相反)
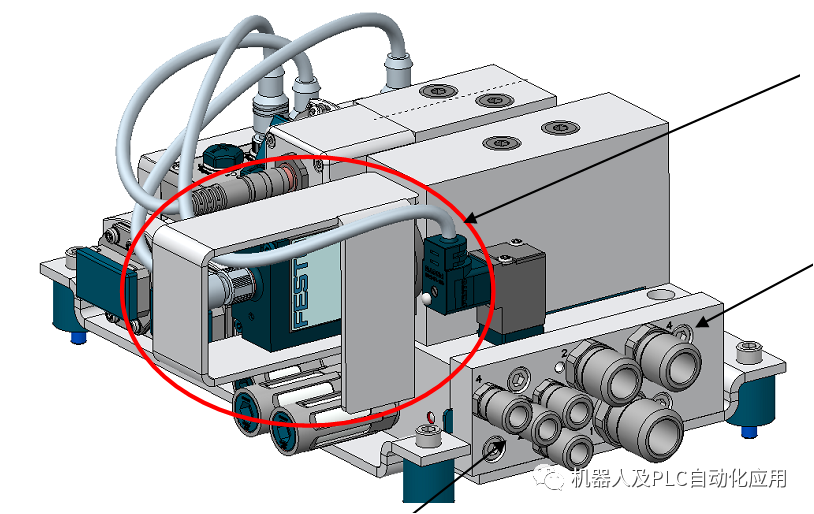
主气缸(C50)气管连接说明图:
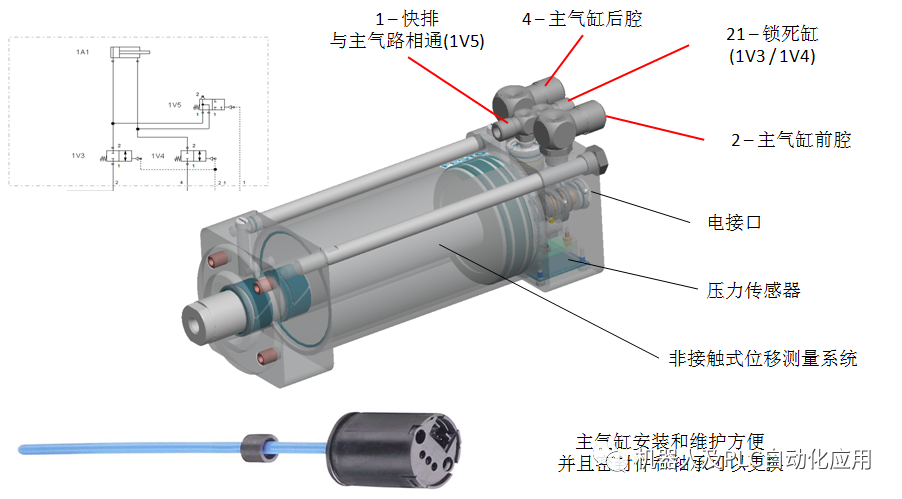
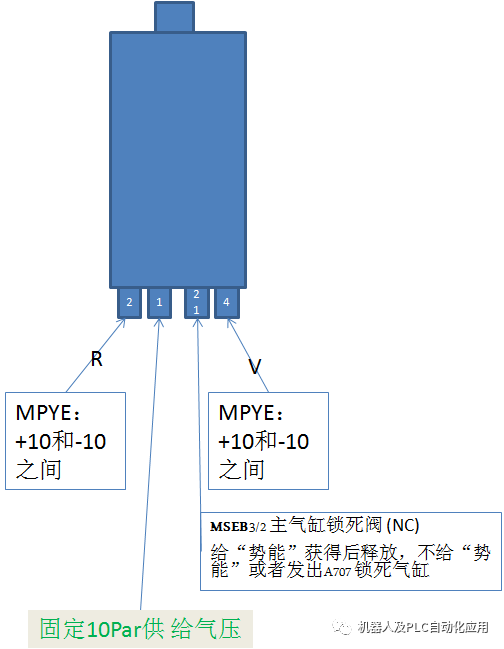
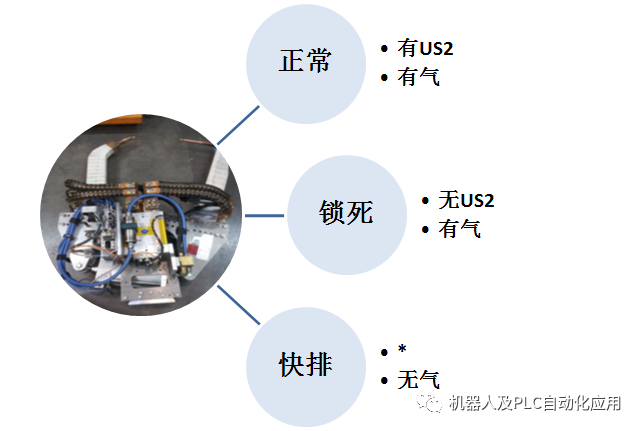
MSEB:控制锁死阀,给主气缸21的解锁压力不大
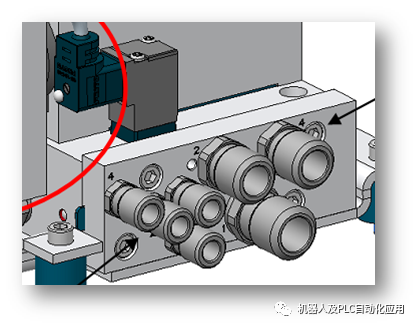
注意:阀座出气口的标号1/21是接到主气缸上的1/21的。
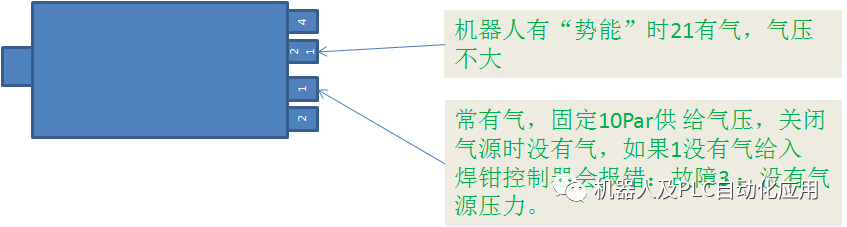
1.机器人有“势能”时21有气,气压不大(由MSEB阀控制)。
2.主气缸1号管是常有气,气压很大,为10PAR气源的压力。
故障3 :没有气源压力。
主气缸气压连续4秒内小于1bar(注意:气源供给没有监控)。如果两边气腔内气压大于3bar,则该错误将自动消除。
没有E705焊钳准备就绪,E783压力过低, E784普通故障。
1.检查气源供给。检查气管连接。
2.检查主气缸附加块(隔断阀)。
责任编辑:pj
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
控制器
+关注
关注
112文章
15223浏览量
171159 -
机器人
+关注
关注
206文章
27033浏览量
201389 -
监控
+关注
关注
6文章
1983浏览量
54586
发布评论请先 登录
相关推荐
机器人的前世今生
机器人主要是用于代替人工作的,首先它是一个机器。对于传统的机器,被使用者设计制造出来后,它的工作步骤、路径都是确定的。机器的设计也是根据它所应用的工作而进行的。
发表于 12-29 14:54
•167次阅读

BD系列工业级连接器为除草机器人带来高端连接新方案
CNLINKO凌科电气电动除草机器人,以其更智能、高效率、无环境污染的特质,堪称除草界的“高大上”。作为一款电驱的机器人,其需要用工业级连接器来实现蓄电池与电机之间的电源连接,这样除草

人形机器人风起,连接器待势乘时
人形机器人主要由伺服器、减速机和传感器三大核心部件零部件组成,占据成本的70%左右。连接器在人形机器人中主要起到信号传输作用,从功能上可以分为动力类、编码器类、控制器类以及视觉类的不同领域的应用;以安装类型看有卡扣式、螺顶型等;
大模型开始赋能机器人 机器人的新角逐已经开始
机器人由运动模块、传感模块和人工智能模块三个关键技术模块组成。对于一般的传统机器人来说,只需要其中一种技术往往就能具备使用价值。比如,工业机器人主要侧重于运动控制技术,扫地机器人则侧重
发表于 10-10 11:41
•201次阅读
【开源资料】使用ESP32C3超简单制作迷你四足机器人
用esp8266做过小四足机器人,这次用esp32C3重制了,主要的原因是C3有蓝牙可以用蓝牙遥控非常方便边,随时连接随时玩不占用手机WiFi。
而且esp32
发表于 09-21 11:15
爬行机器人和爬壁机器人的区别
爬壁机器人:
- 爬壁机器人是专门设计用于在垂直壁面上爬行的机器人。
- 爬壁机器人通常具有特殊的机构或结构设计,如吸盘、切削或粘附机构等,以实现在垂直壁面上的附着和行走能
发表于 08-22 15:05
•396次阅读
profinet转ethernet网关连接发那科机器人配置案例
本案例是西门子1200PLC通过PROFINET转EtherNet网关连接发那科搬运机器人配置案例。所需设备:西门子1200PLC、Profinet转EtherNet IP网关、Fanuc机器人
发表于 08-03 17:58

人形机器人或将成为未来机器人主流
人形机器人未来社会发展。 “人形机器人是未来的必然趋势。奥比中光希望与各家机器人企业一起努力,把机器人视觉、本体做好,让机器人为人类更好地服
焊接机器人主要有哪些种类?
无锡金红鹰工业自动化有限公司(www.jhyrobot.com)是一家设计生产工业机器人及提供机器人工业自动化系统解决方案的高新技术企业。如果您对焊接机器人感兴趣,可以联系无锡金红鹰,我们是专业的工业

机器人定位是如何实现的?
随着传感技术、智能技术和计算技术等的不断提高,智能移动机器人一定能够在生产和生活中扮演人的角色。那么移动机器人定位技术主要涉及到哪些呢?经总结目前移动机器人主要有这5大定位技术。
如何快速地让机器人投入生产
机器人也是一种设备,它主要内容是完成一个制造的其中一个功能。
制造一个产品,可以分为几个部件。和装配几个部件。
一个部件,可以是一个模具。或者由机器人完成组成一个模具。
机器人主要完成的是一些模具
发表于 06-06 16:18
浅谈儿童陪护机器人
儿童陪护机器人越来越受到人们的关注,其中转动控制是其重要组成部分之一。步进电机芯片作为一种常用的控制芯片,被广泛应用于儿童陪护机器人中的转动控制。本文将从步进电机芯片的工作原理、优势和应用场景等方面
发表于 05-11 15:12





 工商网监
工商网监
评论