 ROS MoveIt机械臂的制作
ROS MoveIt机械臂的制作
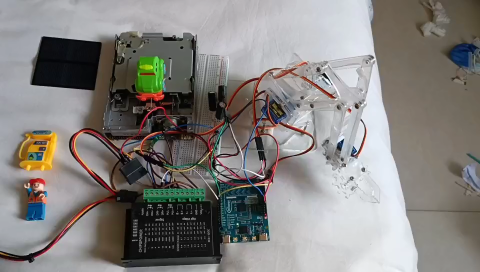
步骤1:准备环境
我的开发环境是在Virtual Box(Windows 10主机)上运行的Ubuntu 16.04 LTS。如果您想在VM上运行Ubuntu,那很好,我可以确认ROS Kinetic的工作原理,尽管有一些怪癖(特别是3D加速和USB支持)。如果您有常规的Ubuntu安装,效果会更好。
注意:您可以在Raspberry Pi上安装ROS,但不幸的是,它的功能不足以在Rviz中运行仿真,更不用说Gazebo了。
1)安装ROS Kinetic。遵循本指南,了解如何在Ubuntu 16.04上安装ROS Kinetic。
2)安装MoveIt。 MoveIt!是ROS的软件包,可用于移动操作,即机械臂。
3)检查是否一切正常。如果需要,运行
roslaunch panda_moveit_config demo.launch rviz_tutorial:=true
,请阅读moveit基本教程
4)您还需要安装urdf_tutorial软件包,我们将使用它以可视化我们正在进行的工作。
sudo apt-get install ros-kinetic-urdf-tutorial
步骤2:创建Urdf文件
如果您遵循MoveIt快速入门教程,则应在主目录中创建catkin工作区(该工作区的名称可能不同,moveit教程的默认值为ws_moveit) 。转到〜ws_moveit/src并在此处克隆我的github存储库。
https://github.com/AIWintermuteAI/ros-moveit-arm.git
如果使用的是相同的像我一样或只是想练习的机械手,您可以保持urdf文件不变,否则,您需要对其进行更改以对应于您拥有的手臂模型。
以下是urdf的简要说明文件,看看我的示例,rviz中的机器人模型将帮助您更好地理解它并申请编写自己的urdf文件。
链接是机器人的一部分,就像手腕一样或平台。它们具有以下属性:
用于rviz和凉亭中的视觉表示。使用高质量的网格
,用于路径规划期间的碰撞检查。建议使用低质量的网格,但是出于教程的原因,我使用的是与视觉相同的网格。 urdf中的
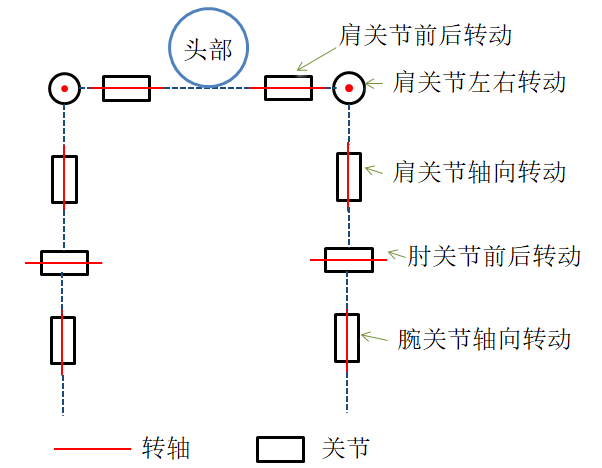
关节是链接之间的连接,描述了彼此之间的相对位置以及它们如何移动。它们具有以下属性:
关节的旋转方向(沿x,y或z轴)
》 关节的最小和最大弧度。仅适用于“旋转”型关节(“连续”关节没有限制,因为它们可以连续旋转)
相对于原点的关节位置
描述与关节连接的是哪两个链接
如果您使用与我相同的机械臂,则需要复制3D网格urdf_tutorial软件包文件夹的手臂。使用此命令
sudo cp /opt/ros/kinetic/share/urdf_tutorial/meshes/
执行此操作
roslaunch urdf_tutorial display.launch model:=arm.urdf
如果要使用自己的网格,请确保将网格以原点为中心(在您喜欢的3D建模软件中为xyz 000),然后再将其导出为二进制文件( !)stl格式。
现在,您可以使用此命令启动rviz来可视化结果
roslaunch moveit_setup_assistant setup_assistant.launch
(从包含您刚才创建的urdf文件的文件夹中启动它)
检查关节和链节,确保它们旋转并正确定位。如果一切正常,请继续执行下一步。
步骤3:使用MoveIt Setup Assistant创建机器人配置
现在当您的urdf文件准备就绪时,是时候将其转换为机械手配置软件包了。
使用以下命令启动MoveIt Setup Assistant
catkin make
MoveIt官方教程对此过程进行了很好的描述,您可以在此处找到它
创建配置包后,请转到catkin工作区文件夹并执行
roslaunch my_arm_xacro demo.launch rviz_tutorial:=true
以生成该包。现在,您可以使用以下命令
启动它,您需要在其中将“ my_arm_xacro”更改为软件包的名称。
步骤4 :完成!
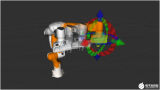
如果成功启动了软件包,您将看到带有交互式标记的机器人模型。您可以使用标记在仿真中进行控制,然后按“规划并执行”为运动学求解器找到正确的路径以达到所需状态。
这是第一步,我们创建了我们的机械臂模型,并可以收集ROS的力量来计算和执行仿真中的运动!下一步-使用真正的机器人来做,为此,我们需要编写简单的机器人控制器。..
责任编辑:wv
-
机械臂
+关注
关注
9文章
471浏览量
23822
发布评论请先 登录
相关推荐
【国产FPGA+OMAPL138开发板体验】(原创)2.手把手玩转游戏机械臂
ROS让机器人开发更便捷,基于RK3568J+Debian系统发布!
MoveIt的快速安装方法
ROS系统的MoveIt模块介绍
ros的基本概念是什么
使用ROS与Movelt实现myCobot 280运动轨迹规划和控制

虹科分享|如何防范MOVEit传输漏洞|高级威胁防御

【CW32饭盒派开发板试用体验】+机械臂游戏项目(开源)(5)加红外游戏操控机
使用 ROS 2 MoveIt 和 NVIDIA Isaac Sim 创建逼真的机器人模拟





 工商网监
工商网监
评论