 电子发烧友App
电子发烧友App












 创作
创作 发文章
发文章 发帖
发帖  提问
提问  发资料
发资料 发视频
发视频资料介绍
数据输入到单片机中后,将根据采集的方法不同来对其进行运算,以得到小车与赛道的相对位置关系及相对运动关系,如果考虑道路信息的历史记录或利用摄像机的话也可以得到道路弯直,曲率等更进一步的信息。分析是上层控制算法的基础,根据摄像头安装位置(高度,俯仰角,对焦距),获得的图像质量是不一样的。分析的目的是从综合考虑了上述因素安装的摄像头拍摄图像中获取尽可能多的有用信息。
本文主要对车模整体设计思路,硬件与软件设计及车模的装配调试过程作简要的说明。
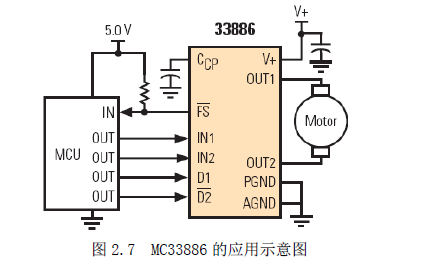
为了利用单片机实现对主电机的控制,使用MOTOROLA 公司的H 桥芯片MC33886。该芯片的供电电压在5V 至40V 之间均可,MOSFET 管的导通电阻为120mΩ,控制信号的输入兼容TTL/CMOS 电平,PWM 的最高频率可达10kHz,同时具有短路保护功能和故障信号的输出。MC33886 的应用示意图如图2.7 所示。图中,V+是为直流电机供电的电源。IN1 和IN2 两个逻辑电平输入端分别控制输出端OUT1 和OUT2。当IN1输入高电平时,OUT1 输出也为高电平——即通过H 桥与V+导通;当IN1 输入低电平时,OUT1 输出也为低电平——即通过H 桥与GND 导通。IN2 和OUT2的关系与此相同。FS 为故障信号开漏极输出,低电平有效。当D1 是高电平或者D2 是低电平时,同时禁用OUT1 和OUT2 的输出,使OUT1 和OUT2 同时变为高阻态。通过控制IN1 和IN2 的电平,即可控制电机正转、反转、停转。对IN1 和IN2 的电平信号进行脉宽调制,即可控制电机的转速。
下载该资料的人也在下载
下载该资料的人还在阅读
更多 >
- 两轮自平衡智能小车的资料合集免费下载 52次下载
- 智能小车的PCB资料合集免费下载 0次下载
- CCD摄像头的电路原理图免费下载 145次下载
- 实现OpenCV244和VS2010下编制的摄像头摄像程序资料免费下载 21次下载
- RK3288摄像头的使用说明资料免费下载 8次下载
- 如何使用CMOS摄像头进行智能小车的的设计与实现 1次下载
- 树莓派的摄像头应该如何启动详细教程免费下载 9次下载
- 使用树莓派设计智能小车教程之小车底盘的安装资料免费下载 25次下载
- 设计一个智能小车跷跷板的资料合集免费下载 5次下载
- OV2640摄像头的基本资料合集免费下载 93次下载
- 使用51单片机设计智能小车的资料和程序免费下载 8次下载
- 寻迹智能小车电路图免费下载 43次下载
- 使用键盘控制智能小车的资料合集免费下载 11次下载
- WIFI智能小车设计制作教程的详细资料免费下载 32次下载
- STM32摄像头实验代码的详细资料免费下载 27次下载
- 用usb摄像头替换手机前置摄像头可以吗 448次阅读
- AHD摄像头与CVBS的区别 3042次阅读
- 技术前沿:摄像头模组 2371次阅读
- 车载摄像头的结构分析 1967次阅读
- dfrobotOpenMV Cam H7智能摄像头简介 3433次阅读
- 如何正确的安装监控摄像头 1.1w次阅读
- 为什么智能摄像头这么受欢迎 4366次阅读
- 关于Firefly摄像头模组的简介 2895次阅读
- 双摄像头的手机有哪些?双摄像头的手机推荐 2.3w次阅读
- 盘点屏下摄像头技术 7116次阅读
- 多摄像头会是移动摄影的新趋势吗?摄像头数量还会越来越多吗? 3140次阅读
- 坏摄像头改工作灯方法 6065次阅读
- 摄像头芯片型号有哪些_摄像头芯片型号汇总 5.8w次阅读
- 智能家庭摄像头你了解多少? 2693次阅读
- 双摄像头系列原理 6059次阅读

 上传资料赚积分
上传资料赚积分下载排行
本周
- 1电子电路原理第七版PDF电子教材免费下载
- 0.00 MB | 1497次下载 | 免费
- 2单片机典型实例介绍
- 18.19 MB | 98次下载 | 1 积分
- 3S7-200PLC编程实例详细资料
- 1.17 MB | 27次下载 | 1 积分
- 4笔记本电脑主板的元件识别和讲解说明
- 4.28 MB | 18次下载 | 4 积分
- 5开关电源原理及各功能电路详解
- 0.38 MB | 14次下载 | 免费
- 6100W短波放大电路图
- 0.05 MB | 4次下载 | 3 积分
- 7蓝牙设备在嵌入式领域的广泛应用
- 0.63 MB | 3次下载 | 免费
- 8基于单片机的红外风扇遥控
- 0.23 MB | 3次下载 | 免费
本月
- 1OrCAD10.5下载OrCAD10.5中文版软件
- 0.00 MB | 234313次下载 | 免费
- 2PADS 9.0 2009最新版 -下载
- 0.00 MB | 66304次下载 | 免费
- 3protel99下载protel99软件下载(中文版)
- 0.00 MB | 51209次下载 | 免费
- 4LabView 8.0 专业版下载 (3CD完整版)
- 0.00 MB | 51043次下载 | 免费
- 5555集成电路应用800例(新编版)
- 0.00 MB | 33564次下载 | 免费
- 6接口电路图大全
- 未知 | 30321次下载 | 免费
- 7Multisim 10下载Multisim 10 中文版
- 0.00 MB | 28588次下载 | 免费
- 8开关电源设计实例指南
- 未知 | 21540次下载 | 免费
总榜
- 1matlab软件下载入口
- 未知 | 935054次下载 | 免费
- 2protel99se软件下载(可英文版转中文版)
- 78.1 MB | 537793次下载 | 免费
- 3MATLAB 7.1 下载 (含软件介绍)
- 未知 | 420026次下载 | 免费
- 4OrCAD10.5下载OrCAD10.5中文版软件
- 0.00 MB | 234313次下载 | 免费
- 5Altium DXP2002下载入口
- 未知 | 233046次下载 | 免费
- 6电路仿真软件multisim 10.0免费下载
- 340992 | 191183次下载 | 免费
- 7十天学会AVR单片机与C语言视频教程 下载
- 158M | 183278次下载 | 免费
- 8proe5.0野火版下载(中文版免费下载)
- 未知 | 138039次下载 | 免费





 工商网监
工商网监
评论