 电子发烧友App
电子发烧友App












 创作
创作 发文章
发文章 发帖
发帖  提问
提问  发资料
发资料 发视频
发视频资料介绍
智能车辆概念是一个集合计算机、传感、信息、通信、导航、人工智能以及自动控制等技术来实现环境感知、路径规划以及自动行驶为一体的高新技术综合体。
本文提出一种智能避障循迹小车的设计方法,采用STC89C516RD+单片机将作为主控芯片,传感器部分采用红外反射接收技术采集地面信息以及检测障碍物,通过控制两路直流减速电机的速度,以实现小车的循迹以及避障功能。
以此作为研究基础,可以设计出在军事、民用和科学研究等方面应用的智能机器人,对解决交通安全问题提供一种新的途径。
本文以智能小车作为机器人的典型代表,其分为三大组成部分:传感器、执行机构、MCU及其外部接口电路。机器人要实现自动循迹功能,同时扩展避障功能,可以实现小车自动识别路线,选择正确的行进路线,并检测到障碍物自动躲避。基于上述的设计需求,传感检测部分考虑到小车一般不需要感知清晰的图像,只要求粗略感知即可,所以可以舍弃昂贵的CCD传感器而考虑使用价廉物美的红外反射式传感器或激光反射式传感器来充当。智能小车的执行部分,是由直流减速电机来充当的,主要控制小车的行进方向和速度。单片机驱动直流电机一般有两种方案:第一,勿需占用单片机资源,直接选择有PWM功能的单片机,这样可以实现精确调速;第二,可以由软件模拟PWM输出调制,需要占用单片机资源,难以精确调速,但单片机型号的选择余地较大。考虑到实际情况,本文选择第二种方案。CPU使用STC89C516RD+单片机,配合软件编程实现。
总体方案设计
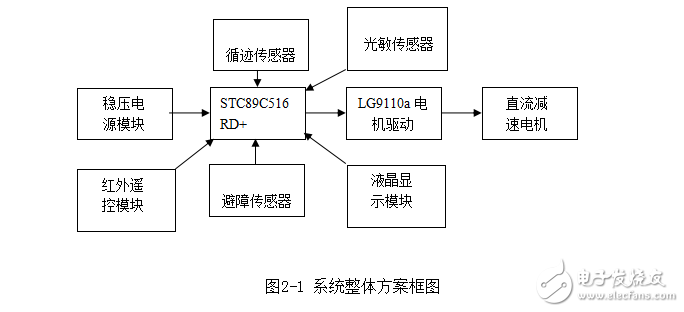
根据题目的要求,确定如下方案:以STC89C516RD+为主控核心,在车体上搭载循迹传感器和避障传感器分别用于路况信息采集以及障碍物感知,采用两片LG9110a作为电机驱动芯片,以驱动车体的运动机构——减速直流电机,供电部分采用两节锂电池经过AMS1117-5.0给单片机、传感器以及相关的外围电路进行供电。光敏传感器为扩展模块,用于判断环境光线强弱,液晶模块可用于显示各类变量信息,在调试智能车的时候可以作为人机界面。红外遥控模块为扩展模块,可以利用红外遥控控制小车切换不同的工作模式。
本方案能实现对电动车的运动状态进行实时控制,控制灵活、可靠,精度高,可满足对系统的各项要求。系统整体方框图如图2-1所示。
- 基于单片机的循迹小车的设计 79次下载
- 智能循迹小车的电路原理图 185次下载
- 使用51单片机实现循迹小车的程序免费下载 33次下载
- 智能循迹小车的C语言程序免费下载 21次下载
- 智能循迹避障小车程序 55次下载
- 基于STC90C52智能循迹小车的设计_齐悦 36次下载
- 面向多路线的智能循迹小车的设计与实现_莫太平 2次下载
- 基于激光传感器的智能循迹小车设计_朱丹 3次下载
- 一种智能小车自主寻_循迹系统设计_李波 3次下载
- 智能循迹小车程序 25次下载
- 智能循迹小车程序 12次下载
- 循迹小车程序 16次下载
- 智能循迹小车程序 36次下载
- 基于51单片机循迹智能小车 0次下载
- 基于STC89C52单片机_红外智能循迹小车 609次下载
- 基于MSP430F5529的红外循迹小车设计 2056次阅读
- 如何制作一个智能寻路+避障的小车? 3076次阅读
- 采用LM393设计的太阳能发电循迹小车 9733次阅读
- 基于鸿蒙系统+Hi3861的WiFi小车详解 6897次阅读
- 微雪电子 Micro:bit轮式智能机器人简介 1932次阅读
- 微雪电子轮式智能机器人简介 1036次阅读
- 树莓派4代无线视频智能小车轻松实现避障循迹 8914次阅读
- 基于STC12C5A60S2单片机及PID控制算法的气味循迹车设计 2963次阅读
- 十款智能遥控小车设计 1.5w次阅读
- 基于STM32的可遥控智能跟随小车的设计与实现 4.8w次阅读
- 基于STC89C52和nRF24L01的智能小车设计 7739次阅读
- 基于FPGA的视觉导航小车设计与实现 3891次阅读
- ldc1000循迹小车 5980次阅读
- 基于 STC12C5A60S2 的智能循迹小车(附传感器电机驱动电路图) 1w次阅读
- KC智能寻迹小车 2652次阅读

 上传资料赚积分
上传资料赚积分下载排行
本周
- 1TC358743XBG评估板参考手册
- 1.36 MB | 330次下载 | 免费
- 2开关电源基础知识
- 5.73 MB | 6次下载 | 免费
- 3100W短波放大电路图
- 0.05 MB | 4次下载 | 3 积分
- 4嵌入式linux-聊天程序设计
- 0.60 MB | 3次下载 | 免费
- 5基于FPGA的光纤通信系统的设计与实现
- 0.61 MB | 2次下载 | 免费
- 651单片机窗帘控制器仿真程序
- 1.93 MB | 2次下载 | 免费
- 751单片机大棚环境控制器仿真程序
- 1.10 MB | 2次下载 | 免费
- 8基于51单片机的RGB调色灯程序仿真
- 0.86 MB | 2次下载 | 免费
本月
- 1OrCAD10.5下载OrCAD10.5中文版软件
- 0.00 MB | 234315次下载 | 免费
- 2555集成电路应用800例(新编版)
- 0.00 MB | 33564次下载 | 免费
- 3接口电路图大全
- 未知 | 30323次下载 | 免费
- 4开关电源设计实例指南
- 未知 | 21549次下载 | 免费
- 5电气工程师手册免费下载(新编第二版pdf电子书)
- 0.00 MB | 15349次下载 | 免费
- 6数字电路基础pdf(下载)
- 未知 | 13750次下载 | 免费
- 7电子制作实例集锦 下载
- 未知 | 8113次下载 | 免费
- 8《LED驱动电路设计》 温德尔著
- 0.00 MB | 6653次下载 | 免费
总榜
- 1matlab软件下载入口
- 未知 | 935054次下载 | 免费
- 2protel99se软件下载(可英文版转中文版)
- 78.1 MB | 537796次下载 | 免费
- 3MATLAB 7.1 下载 (含软件介绍)
- 未知 | 420026次下载 | 免费
- 4OrCAD10.5下载OrCAD10.5中文版软件
- 0.00 MB | 234315次下载 | 免费
- 5Altium DXP2002下载入口
- 未知 | 233046次下载 | 免费
- 6电路仿真软件multisim 10.0免费下载
- 340992 | 191185次下载 | 免费
- 7十天学会AVR单片机与C语言视频教程 下载
- 158M | 183279次下载 | 免费
- 8proe5.0野火版下载(中文版免费下载)
- 未知 | 138040次下载 | 免费





 工商网监
工商网监
评论