AMA0801应用程序模块使用六个过程数据字进行寻址。因此,应用程序配置程序必须将这六个过程数据字传....

如果外部工作组紧急停止,则无法确认(紧急停止按钮显示为白色字体)。如果紧急停止是在您自己的ARG(1....
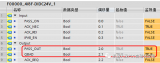
在编译硬件组态时,安全系统会为每个F-IO模块自动创建一个F-IO DB。
右键单击项目树中的 S7-300 Master CPU。 从快捷菜单中选择菜单项“开始仿真”。

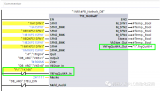
在第三个程序段中,查询是否没有置位输入参数“START_INPUT” 。 如果没有置位,则将复位控....

要创建 STL 函数块“STL-Conveyor”,请按以下步骤操作

PN/PN 耦合器用于连接两个不同 PROFINET 子网,实现多个控制器不同子网间的可靠数据交换

若将机器人控制器关断,多个部件可能在 5 分钟内仍然带电(60 … 800 V)。有可能造成人员死亡....

方法:在带有菜单命令 Edit (编辑 ) > PROFINETIO > Topology (拓扑....

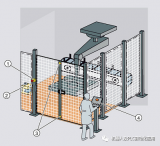
通过激光扫描器监视可进出的生产区域。维修区则由安全门保护。
CPU的属性对系统行为具有决定性的意义。可以设置Profinet接口、启动特性、日时钟、保护等级、系....

零点标定可通过确定轴的机械零点的方式进行。在此过程中轴将一直运动,直至达到机械零点为止。这种情况出现....

我们在备份机器人程序时,有时需要插入2个U盘,两个U盘,一个是A盘 :intern ,另外一个是E盘....

CWRITE可以通过$CMD命令通道将指令传递给解释器。与Single Submit模式相比,Mul....
报警可用来指示在果汁搅拌系统中出现或经常出现的事件或操作状态。例如,清除故障期间可用报警进行诊断。

在以下部分中,将插入分布式 I/O 站(DP 从站)“Filling Station” ,其包含适....

这里将激活“S7-300 Master”CPU 的系统诊断。

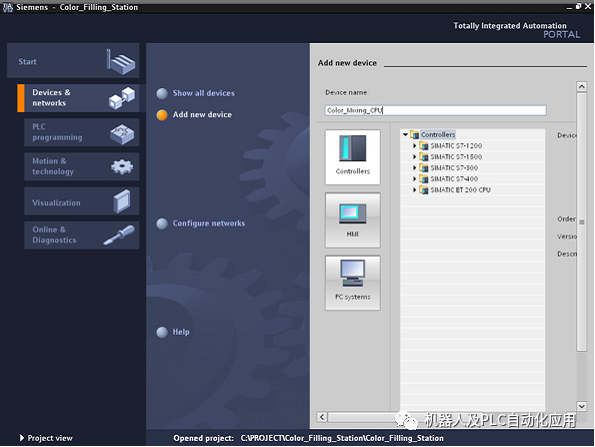
下面将在样本项目“Filling Station” 中插入 CPU“315-2 PN/DP” 。 ....

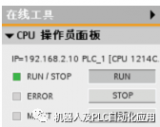
CPU 有以下三种操作模式:STOP 模式、STARTUP 模式和 RUN 模式。CPU 前面的....
输入“Color_Mixing_CPU ”作为 CPU 名称。
存在与 CPU 的在线连接,将通过该连接重置为出厂设置。

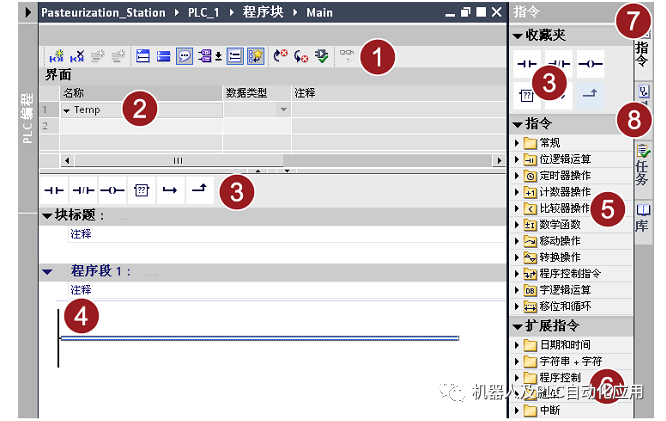
可以使用程序编辑器创建程序包含的块。 程序编辑器由若干区域组成,可根据不同功能对各种编程任务的执行提....
常量是具有固定值的数据,其值在程序运行期间不能更改。常量在程序执行期间可由各种程序元素读取,但不能被....
IEC 定时器和计数器的统一应用,可显著提高程序代码的运行效率。

以下示例显示了如何通过一个可变下标寻址函数块中的多重实例。这些实例将在一个 FOR 循环中迭代处理。

这是一个时代的过去,老古董的东西了这次与大家分享一下。 在IBSCPI1文件中选择SVC文件名称....

KUKA机器人的”Dry run空转”概念. 空转如果自动运行中程序运行中断,并且机器人离开程序编定....
简介 拓扑视图是硬件和网络编辑器的三个工作区中的一个。在此处可执行以下任务: 显示以太网拓扑 组态以....

● 控制结构 – IF ... THEN – CASE ... OF ... – FOR ... T....

说明 PLC 数据类型 (UDT) 是一种复杂的用户自定义数据类型,用于声明一个变量。这种数据类型是....




 工商网监
湘ICP备 2023018690 号
工商网监
湘ICP备 2023018690 号

