 波士顿动力Atlas机器人get自主导航新技能
波士顿动力Atlas机器人get自主导航新技能
2019年7月5日,佛罗里达人类与机器认知研究所 (IHMC)发布最新双足机器人的自主行走程序成果,实验体波士顿动力机器人Atlas可自主导航,通过不同地形路面,完全实现机器人自主行走!
机器人可以自主应对各种复杂地形,包括窄桥与凹凸不平的上下坡路。
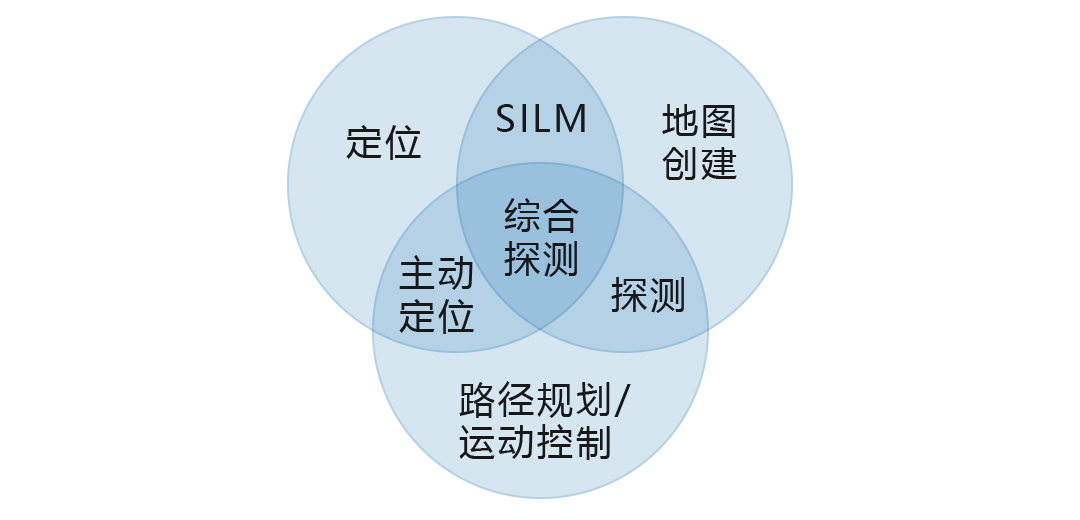
在视频中,研究人员使用了卡耐基自动化多感应设备SI“脑”感应器,来扫描生成一个环境的点数据云,再通过将这个环境数据转化程多个平面。
这样就可以将感应器收集的庞大数据具象化成一个更紧凑的形式,随后将这些平面转化成独立的多边形物体,在这个环境图的基础上,就可以计算出机器人从起点到终点的所有可能路径。
利用规划算法机器人,还可以侧身通过狭窄通道。
当路径受阻时,机器人也能重新规划路径到达终点
IHMC称 目前机器人的自主行走成功率窄桥50% 凹凸地面90% 平地可达100%
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
机器人
+关注
关注
206文章
27033浏览量
201395 -
波士顿动力
+关注
关注
3文章
175浏览量
12879
原文标题:波士顿动力Atlas机器人get自主导航新技能
文章出处:【微信号:robotinside2014,微信公众号:移动机器人产业联盟】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
所有操作层都接入AI,Menteebot给人形机器人发展带来新思路
近日,初创公司Mentee Robotics展示了旗下首款人形机器人的原型Menteebot。相较于波士顿动力的电动Atlas,以及特斯拉的擎天柱(Optimus),Menteebot
波士顿动力公司推出电动版Atlas机器人,展现卓越灵活性与敏捷性
崭新的视频演示中, Atlas 机器人有着不可思议的快速起身能力以及翻转技能,尤其是其头部和身体能实现180度旋转的技能让人赞叹不已。

波士顿动力推出全新纯电动人形机器人,拓展运动范围
波士顿动力公司明确指出,新型Atlas旨在打破人们对人型机器人运动性能的固有观念。它的关节经过精心重塑,可自由转动,据称具备“执行繁琐、肮脏、甚至危险任务”的能力。
波士顿动力公司宣布退役人形机器人Atlas
近年来,波士顿动力公司积极推动技术产品商业化,现代汽车的收购及罗布·普莱特 (Rob Playter) 的上任均为此进程注入活力。同时,Agility、Figure、1X 和 Apptronik 等人形机器人公司的热度也促使
比亚迪投资稚晖君!首次押注人形机器人
人形机器人被波士顿动力的Atlas带出知名度,期间如优必选等公司陆续加入其中。而在2022年特斯拉发布擎天柱Optimus之后,这一赛道彻底爆火。

【科普】干货!带你从0了解移动机器人(三) ——自主导航系统及上位机软件设计与实现
人类社会中发挥着越来越重要的作用。但移动机器人拥有自主导航能力,才能进一步完成上诉所设定的任务。可以说自主导航能力是移动机器人最为基础和核心的技术,而上位机软件的实现与设计,则进一步推
发表于 06-28 09:36

【科普】干货!带你从0了解移动机器人(三) ——自主导航系统及上位机软件设计与实现
,在人类社会中发挥着越来越重要的作用。但移动机器人拥有自主导航能力,才能进一步完成上诉所设定的任务。可以说自主导航能力是移动机器人最为基础和核心的技术,而上位机软件的实现与设计,则进一
新品发布!松灵NAVIS 3D激光自主导航平台发布,移动自主导航定位系统新突破
局限全场景自主移动机器人在各领域开疆拓土的根本问题。 如今, 松灵机器人宣布推出NAVIS 3D激光自主导航平台 ,以一种更简单、更快捷以及更稳定的方式,助力移动
发表于 06-01 11:45
•1171次阅读









 工商网监
工商网监
评论