 EtherCAT I/O 马达控制 机器人从站控制器新选择——AX58100
EtherCAT I/O 马达控制 机器人从站控制器新选择——AX58100
AX58100是一款高性价比EtherCAT从站控制器,其通过了Beckhoff Automation认证,并且内建两个支持100Mbps全双工和HP Auto-MDIX的快速以太网物理接口。AX58100能支持所有的EtherCAT系统,包括标准EtherCAT设备(例如CoE, FoE,VoE,等等)。AX58100在工业自动化,驱动/马达/数据IO控制,数模转换,模数转换变频控制器,影像数据采集,机器人,等工业领域应用方面提供了一个极具性价比的EtherCAT解决方案!
AX58100 提供了一个三通道PWM 控制器或者一个步进式控制器,另外还有一个额外的(ABZ)/Hall 编码器接口 使其能闭环式管理诸如驱动/马达的控制应用;提供了一个SPI master来管理DAC/ADC转换器的控制应用以及影像数据采集应用;当然还提供了一个I/O watchdog(看门狗定时器)和一个emergency stop input(紧急停止) 为了一些工业自动化的安全应用.
AX58100 提供了SPI slave 和 Local busPDI(Process Data Interfaces) 两种接口让系统设计者更容易地执行一些标准的EtherCAT 协议使其能用于那些传统 非EtherCAT MCU和DSP 工业平台。AX58100 提供了一个 可配置化的SPI 总线来提高提高I slave的带宽
以下是产品架构图:
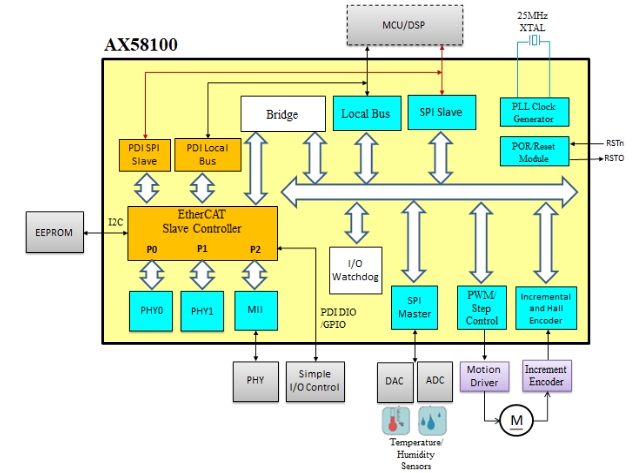
产品主要优势:
两个内建PHY的网口+一个MII界面
内建SPI master界面(可支援8个SPI通道)
内建PWM or 步进/转向控制器,ABZ/霍尔编码器
内建32个数位I/O控制讯号
内建2个过程数据(PDI)界面(SPI Slave/Local Bus)
支援紧急停止输入功能
超高性价比,订货交期短
简单易用的SPI Slave 控制界面,完美兼容ET1100
支持工业级规格(-40至105°C),常规封装(LQFP80)
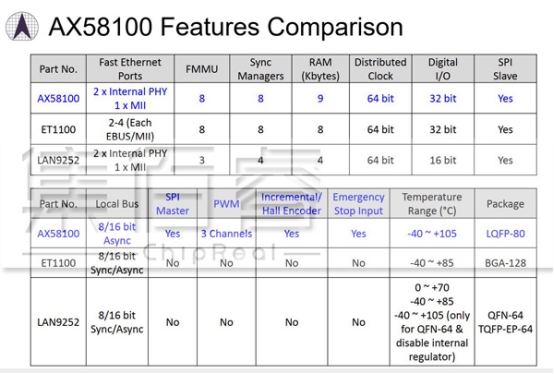
以下是AX58100与其它同类产品的横向比较:
我司是亚信指定授权IDH,并提供AX58100开发所需的相关技术支持。若客户有相关咨询,请联系以下窗口:
深圳市集佰睿科技有限公司
宋先生 15011850965
电话:0755-83258886
地址:广东省深圳市福田区华强北华强广场D座7楼
邮件:song@chipreal.net
-
ASIX
+关注
关注
0文章
11浏览量
9251 -
ethercat
+关注
关注
17文章
442浏览量
37694 -
ax58100
+关注
关注
0文章
12浏览量
7617
发布评论请先 登录
相关推荐





 工商网监
工商网监
评论