 为什么这些机器人应用总是不完美
为什么这些机器人应用总是不完美
多台机器人对零部件抛光,但是效果总是达不到要求;使用机器人执行装配工件,装配过程总是磕磕碰碰不顺利;使用机器人拧螺丝,总是达不到拧紧的标准……为什么这些机器人应用总是不完美呢?
以上这些不完美是因为缺少了一种技术
——“力觉控制功能”!
什么是力觉控制功能?
机器人在装备“力觉传感器”后,根据接收到的各轴向所承受的“作用力”和“力矩”等信息,执行压力控制、力矩控制、刚度控制、作用力检测、采集力觉控制数据等功能,称之为“力觉控制”。
“力觉控制”的应用内容如下:
① 能够对机器人进行柔性控制,根据工件形状做出形状配合动作。
② 在任意方向上以一定压力推压工件同时进行移动。
③ 在动作过程中可以改变机器人的“刚度”及“接触检测条件”。
④ 能够检测接触状态并以此作为条件执行中断插入处理。
⑤ 能够采集接触对象物体时的位置信息及作用力信息。
⑥ 能够采集与位置数据同步的作用力数据作为日志文件保存。
⑦ 能够将日志数据文件传送到FTP服务器中去。
力觉控制功能的技术规格和功能
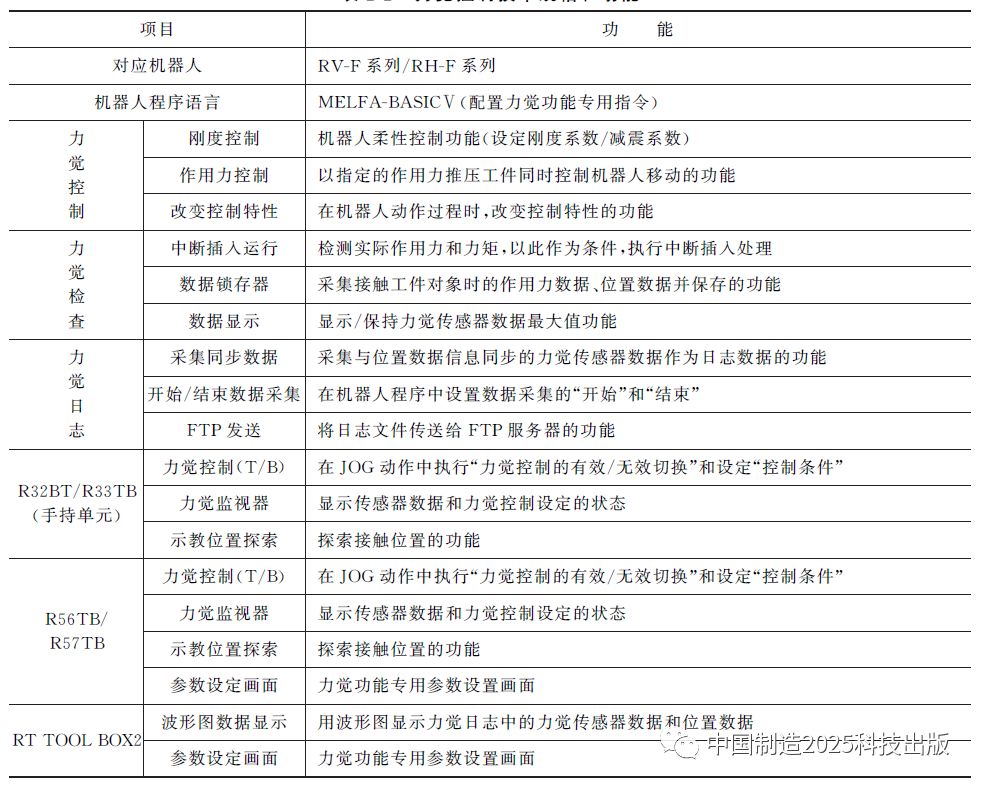
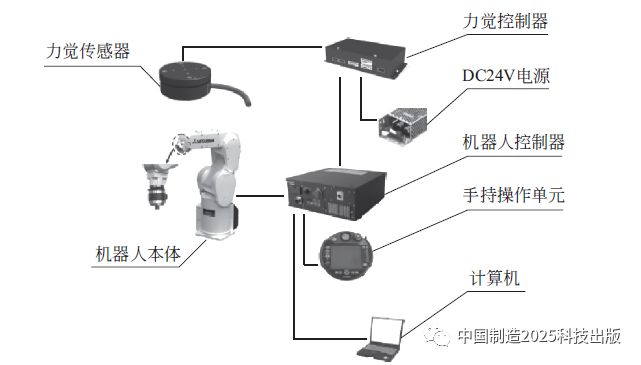
力觉控制系统的构成
一套完整的应用于机器人的力觉控制系统由下列部件构成:机器人本体;机器人控制器;手持操作单元;力觉传感器;力觉控制器;DC24V 电源。
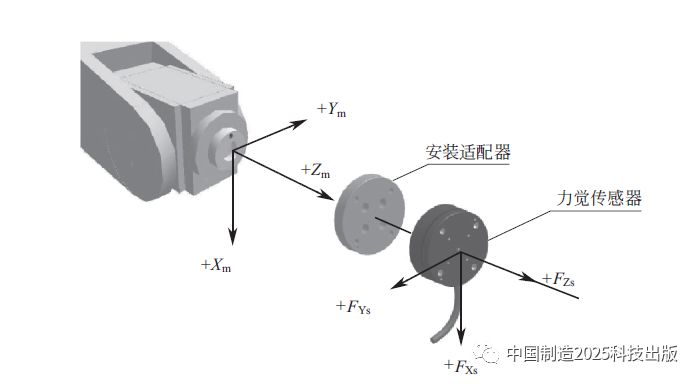
力觉传感器的安装
力觉传感器是精密测定装置,不正确的安装方法是导致传感器精度降低或发生故障的原因。另外,传感器坐标系和机器人坐标系的对应关系也必须正确设定。
(1)适配器的安装 力觉传感器安装在机器人上时,必须使用专用的“安装适配器”。将“适配器”安装在机器人机械接口后,再安装“力觉传感器”。一般在“力觉传感器”成套产品中含有“安装适配器”。须注意检查和使用。
(2)传感器的安装
机器人侧在机器人侧有“适配器”过渡,必须使用传感器配置的螺钉来固定“力觉传感器”。使“传感器安装面”与“适配器”均匀接触,必须按照对角顺序将各个螺钉慢慢拧紧。为防止一次拧得过紧造成传感器受损,请务必按照推荐的紧固扭矩(本例所示为6N·m)分几次拧紧螺钉。
工具侧工具侧指连接抓手一侧,在力觉传感器的“工具侧”安装机械抓手时,为了使安装面均匀接触,须要慢慢拧紧螺钉。如果安装不规范可能无法正确获取作用力数据,导致力觉控制失效。
注意以下几点:
① 抓手安装面应该尽可能平整,确保足够的刚度。
② 电缆的布线不能干涉力觉传感器的运动。如果因为供气或通电而使用气管或电缆,由于受到电缆振动产生的离心力以及电缆重量等的影响,可能无法获取正确的作用力数据,必须采取固定电缆的方法。
力觉控制器与机器人控制器的连接
力觉控制器与机器人控制器的连接要点如下:
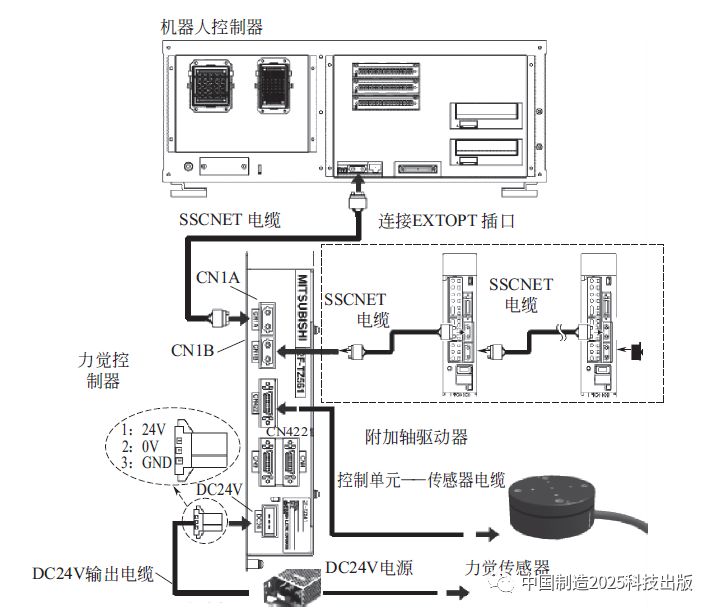
① 机器人控制器通过SSCNET电缆连接于“力觉控制器”的CN1A 接口。
② 如果使用“附加轴”,“附加轴”通过SSCNET 电缆连接于“力觉控制器”的CN1B接口。
③ “力觉传感器”通过2F-FSCBL1-05电缆连接于“力觉控制器”的CN422接口。
④ “力觉控制器”使用DC24V 电源。
力觉传感器与力觉控制器的连接
(1)电缆从机器人本体内穿过
“力觉传感器”通过2F-FSCBL1-05电缆连接于“力觉控制器”的CN422接口。2F-FSCBL1-05电缆从机器人本体内穿过。注意有几条转接电缆。
(2)电缆不从机器人本体内穿过
“力觉传感器”通过2F-FSCBL1-05电缆连接于“力觉控制器”的CN422接口。2F-FSCBL1-05电缆在机器人外部穿过。
电源的连接
力觉控制器使用DC24V 电源。在力觉控制器的成套产品中配置了DC24V 电源和连接电缆,也可以由用户自行配置DC24V 电源。在确认“力觉控制器”与“机器人控制器”以及“力觉传感器”正确连接之后再接入电源。按照以下顺序执行ON/OFF操作。
① 电源ON。按照力觉控制器⇒机器人控制器的顺序(或者同时)接入电源。
② 电源OFF。按照机器人控制器⇒力觉接口单元的顺序(或者同时)断开电源。
电源ON 后,不要拔下SSCNET电缆。不要直视SSCNETⅢ接头及SSCNETⅢ电线前端发出的光。光线进入眼睛,会使眼睛产生失调感。
-
机器人
+关注
关注
206文章
27033浏览量
201386 -
人工智能
+关注
关注
1776文章
43845浏览量
230596
原文标题:为什么这些机器人应用总是不完美呢?
文章出处:【微信号:jingzhenglizixun,微信公众号:机器人博览】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐





 工商网监
工商网监
评论