 基于无人机倾斜摄影建模方式进行大比例尺数字测图
基于无人机倾斜摄影建模方式进行大比例尺数字测图
一、项目概述
目前农村地籍调查的主流做法主要是参考大比例尺地形图、高分辨率无人机影像,运用全球定位系统、全站仪采用数字地籍测量技术和方法开展大比例尺土地权属调查和地籍测绘,获取界址点的房角点、墙角点的坐标。
随着倾斜摄影技术的快速发展,如何利用建立的实景三维模型生产大比例尺地形图(1:500)、进一步拓展成果应用领域如地籍测量等成为行业要探索的一个问题。我单位决定联合深圳飞马机器人科技有限公司对和硕县清水河农场进行一个小范围的低空高分辨率倾斜摄影建模与地籍测图生产试验,目的是为了验证D200+D-OP300(5*A6000)倾斜测量模型精度,为单位进一步展开今后的地籍测量、不动产测绘、大比例尺地形图测绘提供新的技术手段。
二、测区概况
测区位于新疆和硕县清水河农场,测区位于和硕县县城以南,地势平坦,交通便利,测区面积0.364km²,主要为低层规则建筑,地物特征明显。
图1 测区谷歌影像图
三、航线规划
D200+D-OP300(5*A6000)倾斜数据按照1.4cm分辨率(下视镜头),航向80%、旁向70%设计、飞行高度89m、航线间距25米,拍照间距11米,空速8米/秒、设计里程30.5km,飞行2个架次,航线示意图如下:
图2 D200五相机倾斜航线
四、像控点及检查点布设方案
4.1 控制点方案设计
测区按照平均间距150米布设像控点,控制点尽量选取空旷无遮挡的地方,像控点分布位置示意图见下图:
图3 像控点分布位置示意图
4.2 像控点靶标设计
靶标按照矩形设计(如下图),用白色或红色乳胶漆刷在地面硬质石头或路面上,靶标尺寸为60cm*60cm。
图4 靶标设计
4.3 像控点和检查点的测量
4.3.1 像控点
像控点采用RTK进行测量,基准站设置和航飞基站采用同一个,测量全部使用脚架进行对中整平测量,测量位置需在靶标的几何中心位置,并做好点之记。
图5 像控点的测量
4.3.2 检查点
倾斜模型平面精度检查点,选取地面上的明显地物(如:马路标线等地物)使用RTK进行测量,带房檐的房屋使用全站仪进行测量,高程精度检查选取路面、水泥地面等平整的地面使用RTK进行测量。
五、组织实施
5.1 人员投入
飞行技术人员2人,外业测量人员2人,内业编辑人员3人。
5.2 航摄设备
本项目采用旋翼无人机进行低空数据采集,利用多个起降架次完成测区倾斜摄影测量数据的覆盖。

表1 航摄设备情况表
5.3 实景三维建模软硬件
数据处理采用ContextCapture Center Master软件(以下CCC)软件进行倾斜航空影像数据处理,生产实景三维模型。以下为建模所用硬件配置表:

表2 硬件环境配置表
5.4 大比例尺测图软件
本次测试基于实景三维模型数据,使用EPS2016大比例尺测图软件,进行点、线、面等矢量信息采集,提取地面要素轮廓,并获取矢量数据。
5.5 其他作业设备
作业用车辆,GPS、全站仪、笔记本图形工作站等。
5.6 取得成果
实景三维模型一套(数据格式为OSGB);
六、项目实施技术路线
项目实施分为数据采集、ContextCaptureCenter Master数据处理和EPS2016测图三个阶段,并对成果进行精度检测。
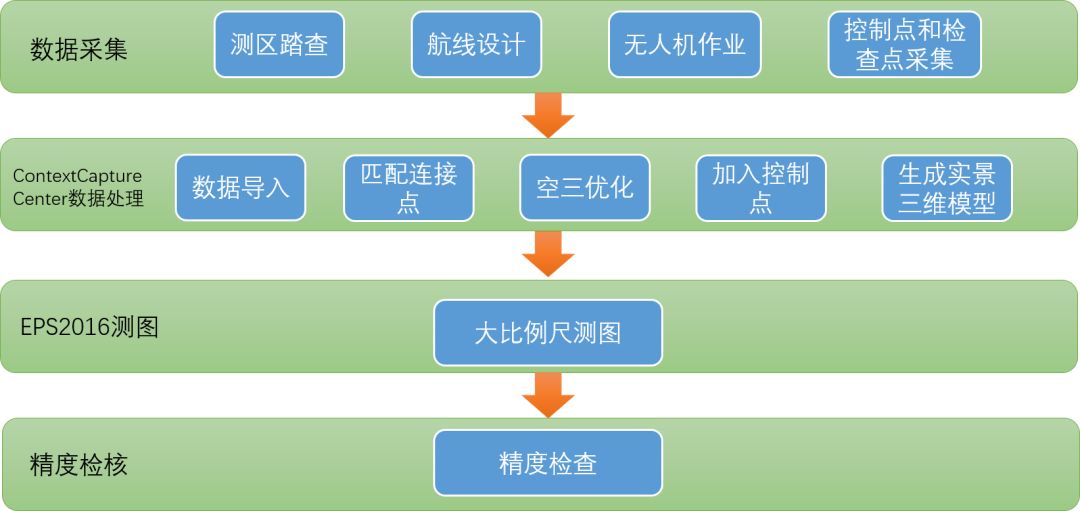
图6 项目技术路线图
七、工作实施情况
7.1 航摄参数及航飞情况
此次航飞的总体技术情况如下表所示:

表3 航飞总体情况技术表
7.2 数据空三处理
测区共获取了12665张原片,在ccc软件中处理空三速度较慢,本次数据处理将测区划分为2个区块分别进行空三处理,最后对模型进行合并。
7.3 实景三维模型生产
将空三成果导入CCC工作流,通过划分模型格网,采用10组计算机同步生产模型数据。经过像对匹配、形成格网、设定格网大小、自动贴图、坐标转换、模型合并等流程,生产出测区的实景三维模型成果(OSGB格式),容量为19.9G,详细如下:
图7 测区实景三维模型成果
图8 模型细节图
7.4 大比例尺测图
项目区测图采用EPS2016测图软件对生成实景三维模型(OSGB格式)转化为DSM格式数据进行导入,本次测试采集有房檐的房屋,采用五点房交会法和直接从模型采集房角方法分别获取房角点的平面坐标,高程精度检查使用模型直接进行采集。为了避免测图人为原因产生的误差,测图分别由两个作业员单独完成,并进行精度比对。
图9 EPS2016软件中进行测图
7.5 精度检测
实景三维模型生产完毕后,使用RTK采集的平面和高程检查点点作为模型检核点,使用全站仪采集的有房檐的房屋房角点进行模型绝对精度检测,精度验证表详情见附表。

八、总结
本项目采用测绘领域最新的倾斜摄影测量技术,充分利用倾斜摄影的自动化空三与建模优势,在较短的时间内生产出了高质量、高精度的模型成果,并在此基础上进行了大比例尺数字测图,技术路线可行,产品精度符合农村地籍调查界址点精度相关标准规范要求,可应用于农村土地确权、不动产测绘等领域。将大部分野外测绘的测图工作转变为了内业工作,可大量减少外业人员的工作强度,提高了工作效率。就本次项目遇到的问题和总结如下:
1、本次测试范围较小仅有0.36平方公里,由于镜头、电池等硬件能力所限,要达到0.05米以上测图精度,飞行高度低,航片数量大,像控点数量多,建模效率较低;
2、由于原片数量大,重叠率高,像控点数量多,在空三处理过程中,在软件中人工添加像控的工作量巨大。如果能把重叠飞至航向70%、旁向70%,原片数量可减少四分之一左右,模型质量、精度、像控点的布设方案还有待研究,需要进行进一步地测试;
3、遮挡问题,由于倾斜镜头与下视镜头呈45°夹角,因此拍摄时树冠的冠幅会遮挡部分地面要素,影响测图判读。因此较适合在秋冬季落叶后或植被较稀疏地带的完成测图任务;
4、内业测图过程中不同的作业人员采集的精度也是有差别的,作业人员的作业水平还有待提高;
5、EPS2016中测图,使用五点房交会法测出的房屋角点和直接从模型上采集的房角点精度区别较大,经分析在EPS中使用五点房采集房屋时,软件会自动将房屋全部直角化,这可能会带来误差。在建模质量较高区域,反而在模型上直接拾取房角点精度较高。
本次测试基于无人机倾斜摄影建模方式进行大比例尺数字测图,技术路线可行,试验精度满足1:500大比例尺测图精度要求,可应用于农村土地确权、不动产测绘等领域。今后的工作应进一步完善与优化大比例尺测图整体解决方案,细化工作流程。
-
高精度
+关注
关注
1文章
475浏览量
25004 -
无人机
+关注
关注
224文章
9884浏览量
174798 -
摄影技术
+关注
关注
0文章
12浏览量
6365
原文标题:飞马D200低空高分辨率倾斜摄影测量在巴州农村地籍调查中的技术研究
文章出处:【微信号:feimarobotics2015,微信公众号:飞马机器人】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
第四集 知语云智能科技无人机反制技术与应用--无人机的组成与工作原理
第三集 知语云智能科技无人机反制技术与应用--无人机的应用领域
第二集 知语云智能科技无人机反制技术与应用--无人机的发展历程
第一集 知语科技无人机反制技术与应用--无人机的定义与分类
知语云智能科技揭秘:无人机威胁如何破解?国家安全新防线!
知语云智能科技无人机防御系统:应对新兴威胁的先锋力量
知语云智能科技:反制无人机新篇章—全景监测与激光打击的尖端技术
无人机全景监测:空域管理的新革命
震撼发布!知语云智能科技引领革新,全景反制无人机系统破茧而出!
无人机“炸机”的因素分析
什么是无人机图传系统?无人机图传系统的构成
【开源项目】使用 Blues Swan 3.0 制作的的 DIY 无人机
空地一体联合测绘,大比例尺测图又快又好!

知语云:低慢小无人机如何反制管制监测行为?方式方法又是什么?
无人机避障技术种类有哪些






 工商网监
工商网监
评论