 美国IIHS发布了行人自动紧急制动系统的测试协议首版
美国IIHS发布了行人自动紧急制动系统的测试协议首版
2018年12月,美国IIHS发布了行人自动紧急制动系统的测试协议首版,协议描述了用于评估客运车辆上行人自动紧急制动(PAEB)系统的测试程序。
该系统类似于已记录的帮助驾驶员避免与行人发生碰撞的系统(Highway Loss Data Institute, 2018),协议可从IIHS网站的技术协议部分获得。
继FCW、AEB后,美国NCAP的评级系统,又向前迈了一步,评级内容的发展节奏,同前辈Euro NCAP一样。
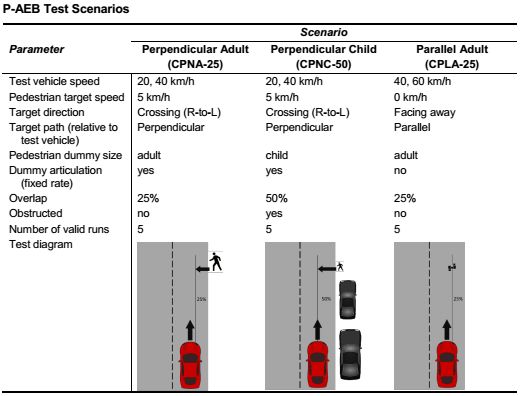
此次P-AEB测试的场景,主要包括以下三类:
1)在车辆行进的路上,成年人垂直交叉而过;
2)在车辆行进的路上,同向并行行驶的车辆遮挡了交叉穿越马路而过的儿童;
3)在车辆行驶的路上,车旁的马路边有成年人步行而过。
评级是基于测试车辆在20公里/小时和40公里/小时(垂直路径场景),以及40公里/小时和60公里/小时(平行路径场景)避免或减轻行人模拟碰撞的能力。
此次公布的测试细节,与此前IIHS同OEM商议的,大抵相同。
测试前准备
测试必须使用新车辆在“收到”条件下进行,里程表上显示的累计里程在200至5000英里之间。测试车辆的轮胎胎压、油量、以及载荷也有相应的要求,保持在标准范围内,减少对车辆测试的影响。
测试前,车辆将以56公里/小时(35英里/小时)的速度进行10次减速,平均减速约0.5至0.6 g。
紧接着在56公里/小时的一系列停车之后,将以72公里/小时(45英里/小时)的速度进行三次额外的停车,并提供足够的制动踏板力,以激活车辆的防抱死制动系统(ABS),使其在每次停车的大部分时间发挥作用。
以下是72公里/小时停车,车辆将以72公里/小时(45英里/小时)的速度行驶5分钟,以冷却刹车。
如果在测试过程中的任何时刻,测试车辆保持静止的时间超过15分钟,则必须以72公里/小时(45英里/小时)的速度进行一系列的三次制动停止,以预热刹车。这些站点的纵向减速应该大约为0.7 g。
在测试期间,从最后一次热身结束到有效测试试验开始,以及/或从每次单独测试运行结束之间,至少需要3分钟。
测试车辆将配备牛津科技公司的RT-Range惯性和GPS导航系统,用于测量和记录速度、纵向和横向加速度、纵向和横向位置、偏航率和碰撞时间。这些数据将以100赫兹的频率采样和记录。
Racelogic Video VBOX Pro将用于从Oxford RT-Range获得的数据叠加到使用30 FPS摄像机录制的视频上,一台相机的位置与司机面向外前挡风玻璃的视野相同。其他摄像机可用于验证碰撞和记录前向碰撞警告(FCW)。
P-AEB测试前一些车辆需要较短的初始化时间。在此期间,进行诊断以验证功能和传感器校准。如果需要系统初始化,IIHS将从车辆制造商获得并执行适当的过程。
P-AEB和/或FCW系统在车辆制动时间和报警应用上有不同的车内设置时,将被设置为中间设置,如果没有中间设置,则设置为后面的设置。
测试中注意事项
在测试过程中,除测试场景中规定的车辆、障碍物或物体外,其他车辆、障碍物或物体不得在测试车道两侧3米范围内或距离测试目标25米的纵向距离内。车道内的架空标志、桥梁、龙门或其他重要结构必须大于离地5米。
行人目标速度将由4activeSB单元控制,成年人和儿童的模拟目标将以5±0.2 km/h(考虑了一般人的步行速度)的速度垂直测试车辆的行驶路线交叉而过。行人目标将旅行在5±0.2 km / h(被认为是运行速度)垂直子场景。
在平行的场景中,行人的模型是静止的。运动目标必须从起始位置加速到1米以内的测试速度,并在达到碰撞/零点前至少达到2米的稳态速度。
成年行人目标将定位在道路中心线距离车辆4 m的位置,垂直于行驶路径的测试车,穿越从从右到左的车道,当测试车辆靠近目标左侧时,车辆前25%的部分就会正好在目标碰撞临界点交叉中心线的位置。
针对儿童目标测试的时候,测试车辆位置略有不同,车头前方是50%的部分与目标正好交叉。与此同时,另外两辆测试车辆也会同向行驶,模拟目标被遮挡视野的场景。平行测试中,行人与测试车辆相向而行,二者交叉重叠部分与第一个测试一样,车头25%。
测试分别在20公里/小时和40公里/小时(垂直成人和垂直儿童场景)和40公里/小时和60公里/小时(平行成人场景)进行。在每个测试速度下,试验将总共执行5次,总体速度降低将根据所有5次测试运行的平均值计算。
每次试验开始时,试验车从目标开始移动150 - 200米,并逐渐向目标加速。对于20公里/小时、40公里/小时和60公里/小时的测试,接近阶段分别在目标之前25米、50米和75米(相当于大约4.5秒TTC)开始。接近阶段在测试车辆撞击目标时结束,或测试车辆在撞击目标前停止。
在接近阶段,司机需要遵守一定的行为规范:
1)调节油门使用平稳的输入,以保持公称测试速度;
2)使用最少的转向输入,以保持测试车辆在车道中心;
3)避免使用突然转向输入或校正;
4)不要碰刹车踏板。
同时为了让测试被认为是有效的,在接近阶段必须满足以下标准,直到与目标碰撞或启动自动制动:车辆速度必须保持在±1.0 km / h的名义测试速度,偏航率的范围内必须保持±1°/ s,横向中心线之间的距离测试车辆相对于车道中心线必须不超过±0.1米。当车辆纵向减速达到0.5 m/s2时,视为自动紧急制动开始。
最终评分标准
碰撞点是用Oxford系统测量的,并定义了测试车辆第一次接触行人目标的时间和地点。可以使用摄像机或磁带开关来验证冲击。在每个测试场景之前,在测试车辆和目标对齐并接触到碰撞位置时,会建立一个零点。
速度降低是通过在自动紧急制动启动前,将碰撞时的测试车辆速度与测试车辆速度相减来计算的。自动制动启动前的试验车辆速度按自动应急制动启动前0.1秒的平均速度计算。如果试验车辆没有接触目标,则认为碰撞速度为零。
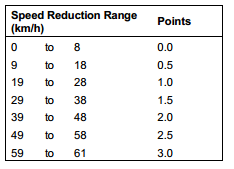
根据每个测试场景中每个速度下5次测试运行的平均速度降低值,依据一个表获得打分。在5次60公里/小时的平行行驶中,平均FCW时间大于或等于2.1秒的车辆也可获得1分。也有FCW会得不到分数。
评分过程中将使用两个权重因子:70%在垂直的分值上,30%在平行的分值上。每个加权运算的乘积四舍五入到十分之一,总分是两个加权子分数之和。
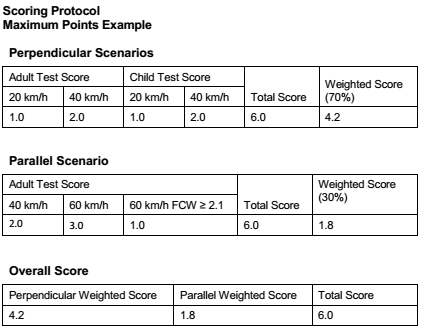
图:最高得分示例
最终,P-AEB的评分结果将会分为四个等级:差(No Credit,得分<1分),及格(Basic,1≤得分<3分),良(3≤得分<5分),优(得分≥5分)。
-
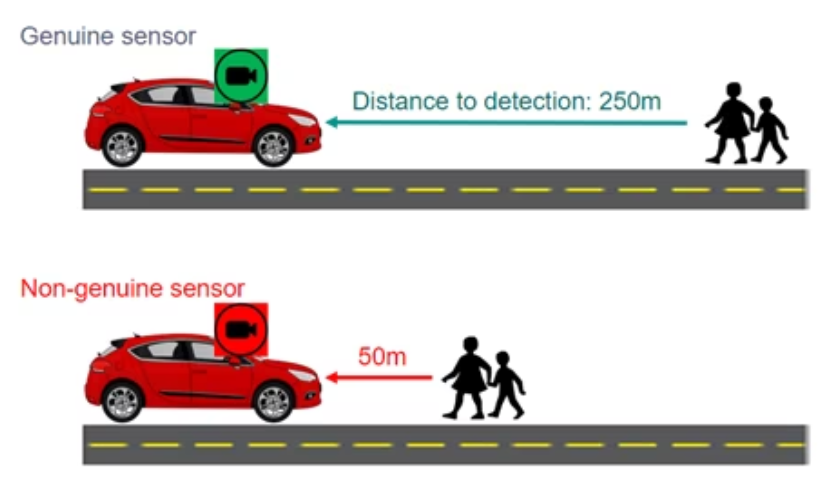
传感器
+关注
关注
2526文章
48092浏览量
740016 -
导航系统
+关注
关注
2文章
231浏览量
30253 -
制动系统
+关注
关注
0文章
111浏览量
15700
原文标题:美版P-AEB新鲜出炉,该来的都会来 | GGAI头条
文章出处:【微信号:ilove-ev,微信公众号:高工智能汽车】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
小米SU7续航和整车安全怎么样?
理性看待AEB自动紧急刹车系统设计

浅谈ADAS前置摄像头设计挑战

Arbe 4D成像雷达以高分辨率雷达技术和先进处理技术消除“幽灵刹车”问题
汽车图像传感器的四种网络安全威胁影响

汽车图像传感器主要受哪些网络安全威胁?

汽车CAN总线保护简析
新能源汽车制动系统解析


决胜汽车图像传感器网络安全赛道,为驾驶体验保驾护航
莫之比智能参与起草的《乘用车 全速自适应巡航系统技术规范》等2项团体标准发布

夜间行人识别—自动驾驶的必修课
意法半导体推出适合汽车系统的惯性模块及ASIL B 认证软件库






 工商网监
工商网监
评论