 利用四足机器人在地下污水系统中进行测试
利用四足机器人在地下污水系统中进行测试
据加拿大广播公司12月21日报道,总部位于瑞士苏黎世的ANYbotics公司正在极端环境下测试其机器人ANYmal。来自苏黎世联邦理工学院的一组研究人员正在利用这种四足机器人在地下污水系统中进行测试,以确定是否可以部署该机器人自主检查污水系统。
ANYmal也正在接受欧洲电力传输系统运营商TenneT的测试,在欧洲北海一个非常偏远的海上转换平台上进行设备检查,已成功完成16个检测点的任务,包括读数表、油位和水位。
该机器人外形与狗相似,凭借高分辨率摄像头、麦克风和激光雷达扫描仪进行导航,能自主开门,还能爬楼梯。这些功能使ANYmal可以替人类执行一些极端条件的工作。
然而,这并不是第一个具备这些技能的机器人。波士顿动力公司的Spot和SpotMini也可以爬楼梯和自动导航,SpotMini将于2019年上市。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
机器人
+关注
关注
206文章
27033浏览量
201389 -
传输系统
+关注
关注
0文章
136浏览量
37015
原文标题:瑞典四足机器人ANYmal开启极端环境作业测试
文章出处:【微信号:tjrobot,微信公众号:天津机器人】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
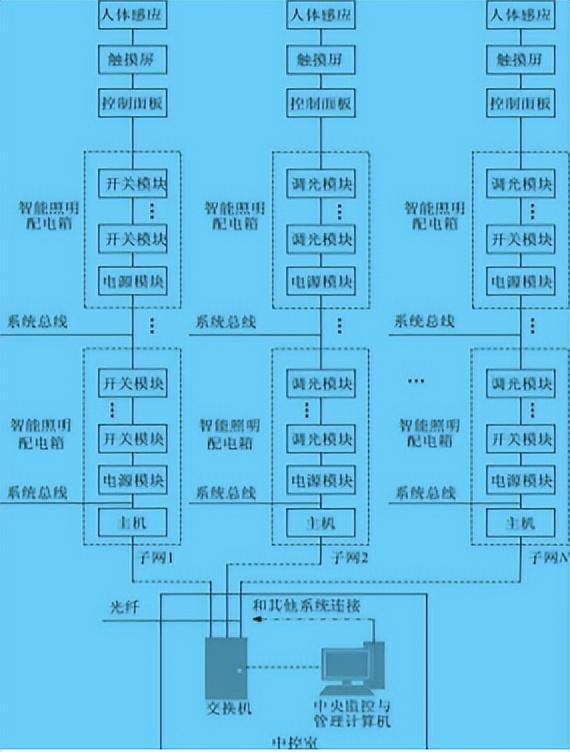
地下污水处理厂智能配电能效与照明系统的应用研究
摘要: 近年来,人们生活质量不断提高,市政建设的要求也在不断提高,许多大、中型城市已经着手建立地下污水处理系统。因为地下污水处理厂的所有结构都是在地
高压放大器在介电弹性体折纸术软体机器人中的应用
广泛应用于大型机器人的开发中。在具体实践时,为了提高软体机器人在行走、医疗操纵和物体抓取等方面的可操作性,建造具有柔性和可变三维结构的软体机器人至关重要。
实验目的:测试软体材料的
发表于 02-27 17:15
浅谈地下污水处理厂智能配电能效方案设计
的基础上,进行了相应的经济分析。结果表明,智能配电系统将成为未来发展趋势,将在越来越多的同类建设工程中得到应用。 关键词:智能配电;地下污水处理厂;配电
地下污水处理厂电气特点和能效管理系统的实际应用
摘要:近年来,随着自然环境的改善,越来越多的城市开始建设地下污水厂。地下水厂将部分或所有处理构筑物置于地下箱体内,而厂区地上部分则做成了景观绿地或公园。这样不仅合利
如何降低焊接机器人在使用中的故障率
随着制造业的不断发展,焊接机器人在自动化生产中的应用日益广泛。然而,焊接机器人在使用中的故障率也成为制约其性能和效率的一个关键问题。本文将探讨一些降低焊接机器人故障率的关键方法,以提高生产线

【开源资料】使用ESP32C3超简单制作迷你四足机器人
用esp8266做过小四足机器人,这次用esp32C3重制了,主要的原因是C3有蓝牙可以用蓝牙遥控非常方便边,随时连接随时玩不占用手机WiFi。
而且esp32C3虽然管脚不多,但在8路舵机的控制
发表于 09-21 11:15
机器人在地下操作有哪些困难和重要性呢
自主性是地下挑战赛的必要组成部分,但让人参与其中依然至关重要。您认为人会继续成为高效机器人团队的必要组成部分吗?还是说未来将是完全自主的?
发表于 09-06 10:41
•242次阅读

什么是爬壁机器人 爬壁机器人吸附原理
什么是爬壁机器人爬壁机器人是一种可以在垂直或近垂直表面上移动和操作的机器人。它们被设计用于执行特定任务,例如在建筑物外墙进行清洁、在工厂内部的管道进

【科普】干货!带你从0了解移动机器人(三) ——自主导航系统及上位机软件设计与实现
发展。在前两篇文章中,我们介绍了移动机器人的基本概念和硬件组成。本文继续深入探讨移动机器人的自主导航系统及上位机软件****设计与实现。
01移动机器人的内载算法
为了实现移动
发表于 06-28 09:36
喷胶机器人,涂胶机器人在工业中的应用-鑫科智造
随着工业现代化的发展,机器人应用日益广泛,其作为一种自主执行任务的机械实体被广泛应用在工业制造领域。喷胶机器人是其中一种经典的机器人类型,其在工业制造加工中有着广泛的应用,本文将探讨喷胶机器人
利用Arduino Nano制作一个四足机器人遇到HC-05蓝牙模块问题,可以用ESP8266替换Arduino吗?
我在 Arduino Nano 的帮助下制作了一个四足机器人。但我经常遇到 HC-05 蓝牙模块的问题。所以现在我正在考虑用 ESP8266 替换 Arduino。谁能帮我这个?
发表于 06-02 08:12






 工商网监
工商网监
评论