 Redzone Robotics的Solo机器人进行管道检测
Redzone Robotics的Solo机器人进行管道检测
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
机器人
+关注
关注
206文章
27033浏览量
201389 -
赛灵思
+关注
关注
32文章
1794浏览量
130521 -
检测
+关注
关注
5文章
4083浏览量
90745
发布评论请先 登录
相关推荐
协作机器人开发商Collaborative Robotics官宣完成1亿美元B轮融资
近日,协作机器人开发商Collaborative Robotics官宣完成1亿美元B轮融资。本轮融资由General Catalyst领投,Bison Ventures、Lux Capital、Industry Ventures 等多家机构跟投
LabVIEW的六轴工业机器人运动控制系统
环境中,对机器人进行了正逆运动学仿真测试。接着,对单轴和多轴伺服系统进行了控制测试,最终实现了机器人的轨迹规划实体控制。
在整个项目中,LabVIEW的功能被充分利用,特别是在算法实现
发表于 12-21 20:03
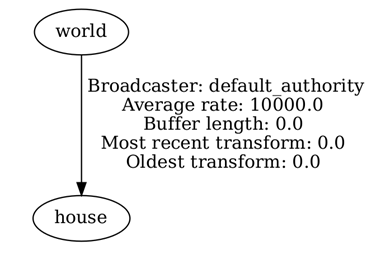
如何对机器人静态TF广播进行管理
静态TF广播 我们说TF的主要作用是对坐标系进行管理,那就管理一个试试呗? 坐标变换中最为简单的应该是相对位置不发生变化的情况,比如你家的房子在哪个位置,只要房子不拆,这个坐标应该就不会变化
没有有前辈用LabVIEW控制kuka机器人c2的经验?通讯是怎么做到的?
我看NI有Robotics Toolkit for KUKA KR C2的附加包,这个怎么用啊?如何和kuka机器人建立通讯啊?是Tcp接口吗?
发表于 10-21 20:59
ai人工智能机器人
的进行监控管理。
智能电话机器人的另一个优势是不知疲倦,不需要休息和喝水,不需要休息。人在工作时就会有各种各样的脾气,但智能电话机器人不会,永远都以最严谨、最周到的态度和客户进行沟通。
发表于 09-21 11:09
基于Matlab和VR技术的移动机器人建模及仿真
利用 Matlab 建立移动机器人的动力学模型 ,在虚拟现实 (VR )环境下 ,实时仿真移动机器人路径跟踪的运动特性 ,为基于 Internet 的机器人遥操作试验搭建了仿真平台 。 实验结果表明
发表于 09-20 06:24
什么是爬壁机器人 爬壁机器人吸附原理
什么是爬壁机器人爬壁机器人是一种可以在垂直或近垂直表面上移动和操作的机器人。它们被设计用于执行特定任务,例如在建筑物外墙进行清洁、在工厂内部的管道

【科普】干货!带你从0了解移动机器人(四) ——移动机器人导航技术
通过视觉传感器(或组合式的色标传感器),检测事先铺设在地面的色带与移动机器人(AGV/AMR)的相对位置,从而使小车沿既定路线(色带)行驶。
**色带导航优点:**铺设容易改路径,成本低
发表于 06-28 09:52
【科普】干货!带你从0了解移动机器人(三) ——自主导航系统及上位机软件设计与实现
则提供了对多台移动机器人进行管理的功能,包括机器人的电量控制、状态监测、报警处理等。
上位机软件主要由2个主界面组成:主从机的登录通信模块以及移动机器人当前话题列表和运动信息显示界面、
发表于 06-28 09:36
自编程机器人,售后难做吗?
自编程是如何完成的。
自编程其实也不是很高深的问题。
当用户给出参数时,有时也包括逻辑。
例如用户说,如果设备打开完毕,执行一个命令。
这个例子就包括了一个如果。你的智能机器人只需要生成一个
发表于 06-08 16:20
如何快速地让机器人投入生产
机器人也是一种设备,它主要内容是完成一个制造的其中一个功能。
制造一个产品,可以分为几个部件。和装配几个部件。
一个部件,可以是一个模具。或者由机器人完成组成一个模具。
机器人主要完成的是一些模具
发表于 06-06 16:18
机器人如何计算简单的运动
模型要具备齿轮,导轨几种基本的运动原理。
要分辨基本图形,视觉模型要能分辨圆形,方形和三角形。
有了这两点,机器人就基本上能计算开模和注塑这种简单的工作了。要替代人类的工作,还要进一步学习。
发表于 05-19 20:40
浅谈儿童陪护机器人
儿童陪护机器人中得到了广泛应用。
在儿童陪护机器人中,步进电机芯片主要用于转动控制。在此过程中,控制器通过对步进电机芯片输出的脉冲信号进行控制,使得步进电机以一定的步距旋转,从而实现机器人
发表于 05-11 15:12





 工商网监
工商网监
评论