 采用Cortex-M3及RTOS控制的散射式大气低能见度仪的设计方案
采用Cortex-M3及RTOS控制的散射式大气低能见度仪的设计方案
1.引言
近年来我国大气环境污染日益严重,能见度作为主要气象环境参数之一,在天气变化、大气污染状况和浑浊程度等方面有着重要的环境监测意义,同时也在高速公路、航海、航空等交通运输以及军事等领域发挥了重要作用。
目前能见度检测仪器主要有以下两个方面特点:一是目前公路交通、海港、机场等场所使用的能见度检测仪器基本上均为国外产品,一台动辄过十万的高昂价格限制了应用规模,往往适用于大区域的天气性能见度测量,难以覆盖到“团雾”
多发的局部小范围区域,存在预警检测盲点;二是现有的能见度检测仪器更注重测量精度,功能方面则较为单一,扩展兼容性差,数据传输方式基本还是以有线传输为主,没有有线通讯网络建设的地方就难以方便地架设,造成预警盲点区域较多,需要依赖基础建设方面的投入。因此,针对现有问题,应用新技术设计一种低成本、低功耗、扩展兼容性好、能够灵活接入到现有智能交通监测网络的低能见度预警检测前端设备。
2.能见度的测量理论
根据气象能见度的定义,白天和夜晚能见度的概念有显着的差异。首先,白天能见度是以晴朗无云的天空为背景,而夜晚的观测背景是较黑的夜空;其次,二者的目标物也有区别,白天为黑色物体,夜晚则为灯光,属于点光源。所以白天和夜晚能见度测量依据的是不同的理论,分别为Koschmiedir“大气光”亮度传输公式和Allard的大气灯光照度传输公式。夜间能见度受影响的因素更多,测量过程远比白天能见度复杂,计算误差也更大。事实上,出于一致性和简易性考虑,目前大部分的能见度测量仪器主要以Koschmiedir定律作为基本的理论依据,仪器测量出的能见度值对于白天具有实际价值,基本上等同于白天的实际能见度,而对于夜晚仅具有物理意义,但作为参考对夜间行车间距和车速等行业应用仍具有指导作用。
2.1 能见度的计算公式
Koschmiedir定律可由能见度测量的基本方程Bouguer-Lambert定律推导出,根据Bouguer-Lambert定律:

式中, F 是在大气中经过x路径长度接受的光通量, 0 F 是在x=0时的光通量,σ 为消光系数。求导可得:

虽然Bouguer-Lambert定律针对的仅是单一光谱,但作为近似,对光谱通量同样适用。透射因数为:
式(5)即为Koschmiedir定律,式(6)为白天能见度的基本计算公式。Koschmiedir定律是确定天白能见度的理论基础,反映的是假定消光系数为常数,也就是大气处于均匀状态时,对于以水平天空为背景的黑色目标物,大气的透明程度以及目标物对于背景的对比度随距离变化的规律。由该定律可知,只要测得消光系数σ ,就可计算得到能见度值。
气象观测上,通常取视觉阀值ε =0.02,而大气光学视程(MOR)定义ε =0.05,代入式(5),可得到气象能见度和MOR的值:
航空业出于飞行安全考虑,通常推荐选用较高的视觉阀值ε =0.05,采用该值计算得到的能见度更为严格,更接近行业的实际需要。而高速公路等要求高安全性的应用领域也常常以该视觉阀值作为参考。因此式(8)是最常用的白天能见度的基本计算公式。本文研究研究测量的能见度就是MOR.
2.2 前向散射式能见度测量原理
根据Koschmiedir定律,只要测得大气消光系数σ ,就可以计算得到能见度,可见消光系数σ 是测量能见度的关键。前向散射式能见度测量仪器就是通过从适当的角度测量散射光强度来计算消光系数,进而获得能见度。其原理主要基于三个假设前提:
(1)大气均质,大气内影响能见度的各种颗粒是均匀分布的,即消光系数σ 为常数。该假设是所有能见度测量仪器的设计基础,无论是采用何种方式测量能见度,都是用有限空间的被测样本代表相对较大范围的大气状态,不可能包括所有的大气颗粒。由于大气中颗粒状态变化是大范围而且相对较为缓慢过程,在一定尺度空间范围,可以认为呈均质状态。
(2)大气消光系数σ 等于大气中雾、霾、雨和雪的散射系数,也就是说大气分子没有吸收或分子内部没有交互光学效应,可以忽略大气对光的吸收作用。用A表示大气的吸收系数,用S σ 表示散射系数,则消光系数σ 有:

这一前提的正确性与大气粒子的光学特性有关,光线在大气传播的消光效应主要由吸收和散射引起,大气溶胶主要由水滴构成时,对光线的吸收作用主要取决于光线的传播距离,若长度足够小,则吸收作用便微弱到可以忽略不计。由于前向散射方式不需要长的光线传输距离,所以测得的散射系数就可以认为是消光系数。
(3)通常情况下,选择适当的角度,散射仪测量的散射光强与散射系数成正比例关系,与散射颗粒的尺寸大小无关。该前提可根据Mie散射理论证明其正确性。
许多学者通过对大量实验数据进行统计,认为选择散射角θ 在20°~50°之间时,散射相函数P(θ )对气溶胶谱分布的变化不敏感,基本为常数,而且散射光更强。根据Mie散射理论,此时散射光强度I (θ )与散射相函数P(θ )、散射系数 S σ 、以及入射光强的关系为线性正比关系:
式(11)中,散射角θ 由仪器发射器与接收器的摆放角度决定;入射光强0 I 取决于光源与透镜的参数,由仪器的具体光学设计确定,为定值;根据前提三可知散射相函数P(θ )为常数。由此可见,能见度值V与散射光强成正比关系,即接收到的散射光强越强,此时能见度越高,反之散射光强越弱,能见度越低。
3.硬件系统设计
3.1 前向散射式红外光发射和接收装置的光路与结构设计
低能见度预警检测仪的发射与接收装置分置于支架的两端,成35°夹角,发射光配置成双光路,用于前向散射和光强稳定参考。发射光源采用940nm波长的红外LED组,用固定的低频率方波进行调制发射,经一定体积空气柱散射进入接收端,接收端选取对该波长响应良好的光电接收传感器,将接收到的散射光转换为电信号后进行调理和采集。发射器的参考光路中布置有光电接收器件,通过监测发射装置参考光路的光强,采用负反馈比较测量法进行稳定校准,补偿因温度变化以及器件老化效应等原因造成的发射光强不稳定的问题,减小系统测量误差。
接收到的散射光转换而成的电信号实际上是深埋在噪声和干扰中的调制过的纳安级的交流电流信号需要应用微弱信号检测技术进行调理转换为幅度范围合适的直流电压信号送给AD进行采样和数值读取。
微弱电流首先经过高输入阻抗的跨导前置放大,得到的是信噪比较低的交流电压小信号,通过多阶低噪声高通、低通滤波器组成的带通滤波器组,滤除50Hz工频干扰并抑制高频率干扰噪声,进行交流放大后送给锁相放大器。锁相放大器是各种微弱信号检测技术中应用广泛、行之有效的检测手段之一,利用信号具有自相关性而信号与干扰噪声不相关的原理,从背景噪声中提取有用信号,主要由相位敏感检波器和低通滤波器构成。信号经过低通滤波得到的直流电压的幅度即代表需检测的接收散射光强。信号调理电路的设计中还需要考虑屏蔽、抗干扰措施以及低噪声双电源供电的实现。
3.3 以Cortex-M3架构微处理器为核心的控制系统硬件实现
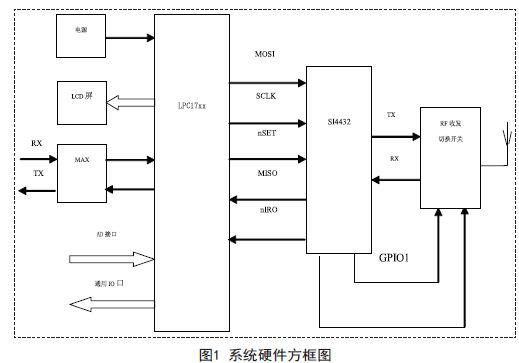
系统控制和数据处理部分采用基于ARM Cotex-M3内核架构的LPC17xx系列微处理器为核心的硬件平台。LPC17xx系列具有较高的运行速度和丰富的外设接口,满足系统低成本、低功耗、高性能等方面的设计要求。控制系统硬件主要包括微处理器及其支持电路、实时时钟(RTC)、SD卡本地数据存储电路、数据传输接口电路、AD采样电路、温度监测电路等。
AD采样使用16位精度具有自动校准功能的AD7705芯片,使用SPI总线与处理器连接。温度传感器芯片选用LM75,使用IIC总线连接到处理器。数据传输主要通过USART和SPI数据总线接口实现。充分利用LPC17xx的定时器,实现数字波形发生器和数字移相器,输出用于发射光源调制的低频方波信号,以及用于锁相放大器相敏检波的移相参考波形,采用负反馈比较测量法自动确定所需调节的相位,以替代传统的模拟电路搭建的方波发生电路及移相电路,可简化硬件设计和相位调节的调试过程,有利于提高稳定性。框图如图1所示。
3.4 多种传输方式的预警数据输出方案设计
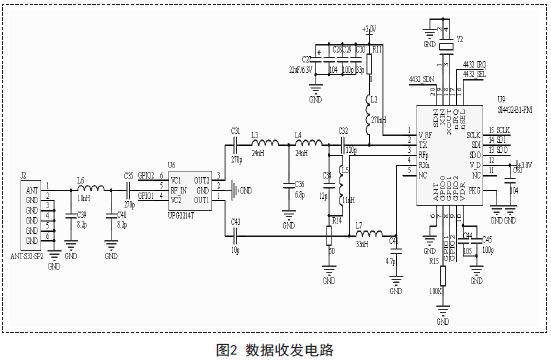
低能见度预警检测仪的数据输出支持有线传输、短距离无线数传以及公网数据传输多种方式,以应对现场复杂的安装条件以及多样的应用需求,灵活方便地接入到预警监测网络。有线传输使用MAX232和MAX13082接口芯片,与微处理器UART连接,完成TTL电平到RS232和RS485电平标准的转换。短距离RF无线数传采用Silicon Labs EZRadioPRO系列ISM频段无线收发一体芯片SI4432,该芯片最新版本为B1版,与微处理使用SPI总线进行数据收发通信,在240-960MHz频率下输出功率可达+20dBm,接收灵敏度-117dBm,实现500米范围内与可变信息牌、路标等现场预警执行设备的可靠数据传输。在没有有线通讯网络建设的地方,使用GPRS或CDMA公网数据传输,将预警情况及时通报给指挥监控中心及相关值班人员。多种方式数据传输采用模块化设计,可根据需要进行相应传输模块的配置和更换,有助于降低设备成本。
低能见度预警检测仪数据收发电路如图2所示,其中U9为SI4432,由于采用单天线形式,使用了射频收发转换开关UPG2214T(图2中U6)进行收发切换。
4.软件设计
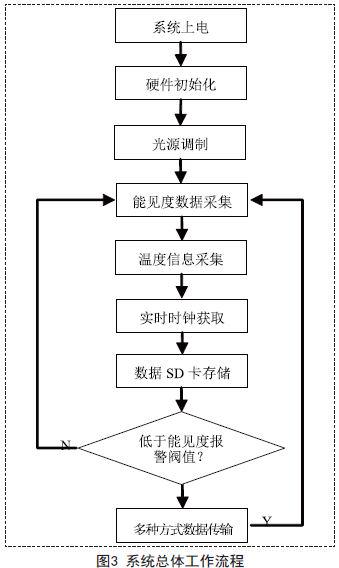
系统软件设计采用RL-RTX实时操作系统(RTOS),以实现多任务的嵌入式程序应用。使用RTOS可简化任务的调度和维护,对CPU、内存等系统资源进行灵活配置。程序开发、编译及仿真使用ARM公司的RealView MDK开发工具集的新版本μVision 4.系统的主要功能包括能见度数值等多信息的采集、多种方式的数据传输以及数据存储等,总体工作流程如图3所示。系统上电后,首先开始系统初始化工作,进行对硬件模块的配置以及仪器自检。初始化完成,系统开始不间断地对能见度数值、温度信息等数据进行采集,获得的数据结合时间信息存入SD卡。当检测到的能见度连续一段时间均低于设置的报警阀值时,触发低能见度报警机制,系统通过有线或无线多种方式传输网络向指挥中心进行报警,以及实时更新现场可变信息牌、预警路标等显示设备。图3所示为系统总体工作流程。
5.低能见度场外实验
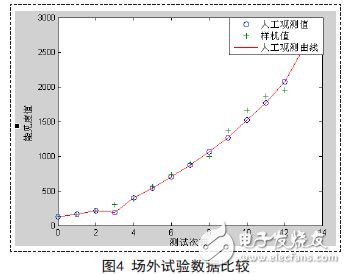
为了检验样机的性能和可靠性,2012年12月至2013年1月,对样机在我市进行了为期2个月的场外实验,直接测量输出大气能见度值,实验时间分别选在多雾发生的凌晨和傍晚,为方便分析,在不同能见度区间挑取了典型数据,并与人工观测值进行对比,结果如图4所示。从图4可以看出,样机的检测精度与能见度值成反比,随着能见度的升高而降低,这是因为在较高的能见度天气下,环境光背景噪声和杂光干扰更大,检测到的散射光信号更为微弱,测量精度也就越低。系统样机在500m范围内检测误差小于±5%,而500~2000m误差则增加到约±10%,完全符合系统±20%的测量精度要求。
6.结论
散射式低能见度预警检测仪主要由红外光发射和接收装置、信号调理模块、控制模块、预警数据输出模块和电源模块组成。本文提出的基于Si4432散射式大气低能见度仪的设计方案。方案中所设计系统的控制和数据处理采用基于ARMC o r t e x - M 3内核的新型微处理器,运行RTOS实时操作系统,有利于提高运行效率和系统性能,便于升级、维护和扩展。具有良好的社会效益和广阔的产业化前景。
-
传感器
+关注
关注
2526文章
48092浏览量
740016 -
微处理器
+关注
关注
11文章
2131浏览量
81408 -
检测仪
+关注
关注
5文章
3898浏览量
41483
发布评论请先 登录
相关推荐
一种简易的透射式能见度测量装置的设计方案








 工商网监
工商网监
评论