 以板球系统为对象提出了一种反演自适应动态滑模控制方法
以板球系统为对象提出了一种反演自适应动态滑模控制方法
摘要:
针对板球系统对期望轨迹的跟踪问题,提出了一种反演自适应动态滑模控制方法。考虑实际情况下外界干扰及不确定量的未知性,结合自适应控制对未知量边界进行估计。为了有效削弱对数学模型的依赖性,同时规避反演法中的微分大爆炸现象,引入动态面策略。考虑是否存在外界不确定干扰划分出两种实验环境,分别运用本文方法和动态滑模的方法进行了仿真实验。仿真结果表明,所设计控制器对系统参数摄动和外界干扰不敏感,该方法能较好地实现小球的轨迹跟踪,具有良好的动态跟踪性能,体现出较强的鲁棒性和自适应特性。
0 引言
板球系统是一个典型的多变量、欠驱动非线性系统[1],从20世纪80年代开始,板球系统因其结果的直观性以及结构的简易性,被广泛用于各类控制算法性能的验证,受到国内外的广泛关注[2-4]。在对期望轨迹的跟踪过程中,板球系统的控制条件干扰因素众多。各种外界存在的不确定性扰动使得控制变得异常复杂,也给系统的精确建模带来很多的困难,单纯的线性化很难达到理想的要求[5-6]。板球系统控制器的设计日渐成为关键的问题,一系列针对抑制非线性、强耦合和不确定性对系统性能影响的算法被提出,鲁棒控制[7]、滑模控制[8]以及自适应控制[9]等,都在一定程度上提高了系统的响应速度和控制精度。
滑模变结构控制作为控制理论中一种特殊的非线性控制策略,可以根据系统当前的状态,控制系统按照预定的状态轨迹运动[10-11]。这种滑动模态的设计对系统参数和外部干扰均有很好的鲁棒性。且因算法相对简单,在工程实现过程较为容易,而被广泛应用于实际现场设备。但是滑模变结构的开关特性会引发实际系统强烈的高频抖振问题[12]。这种高频抖振会破坏系统的稳定性,影响系统的控制精度。为了解决这一问题,文献[13]重点讨论了模糊滑模控制的方法,通过模糊算法调节指数趋近律的参数,设计了一种模糊滑模控制器。文献[14]结合系统参数不确定性,采用自适应变结构控制方案,使得系统信号保持有界。文献[15]采用的趋近律滑模变结构控制方法以及文献[16]的神经网络滑模控制都在一定程度上避免了抖振现象的出现。但是上述方法均没有综合考虑系统的不确定性因素和外在干扰。
本文针对板球系统多变量、易受不确定因素影响而导致控制器难以设计、鲁棒性差的问题,提出一种反演自适应动态面滑模控制方法。在反推过程中,综合考虑每一步设计控制量时的相互制约性,在确保系统满足Lyapunov全局渐近稳定性的基础上,通过将自适应技术与动态滑模算法相结合,对外在干扰值进行估计,设计了新的切换函数。该方法对建模误差、外界干扰等不确定因素均不敏感,具有良好的自适应能力和鲁棒性能。
1 系统描述及分析
板球系统的主要结构由2个直流电机、球盘、小球、摄像头、工控机等部分构成。工控机内控制板驱动2个直流电机分别控制球盘x轴方向和y轴方向的升降,经球盘的运动可调整盘中小球位置,进而实现对期望轨迹的跟踪。球盘上方的摄像头结合图像视觉系统对小球的位置信息进行实时采集。通过位置信息对比,及时调整小球位置,完成轨迹跟踪。
其中,动力学机构部分由于机械误差以及控制性能各种复杂干扰条件众多,对板球系统的精确跟踪及抗扰性能有着很高的要求。能否有效提高板球系统动力学机构的控制性能,对板球系统的整体控制性能有着决定性的影响。为了便于动力学建模与分析,针对板球系统动力学机构,考虑以下假设情况:
(1)任何情况下,球和平板都接触;
(2)不考虑板的面积和旋转角度限制;
(3)球在板上没有滑动和绕其竖直中心轴的转动;
(4)板在x轴和y轴方向上关于其支撑点对称。
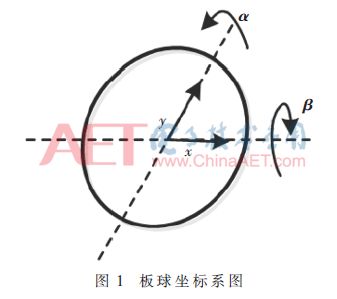
建立板球系统坐标系如图1所示,参考文献[17],结合以上假设,依据拉格朗日力学方法进行动力学分析建立板球系统动力学状态方程如下:
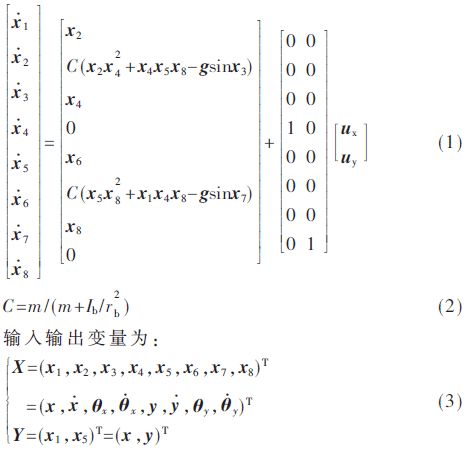
假设x轴和y轴之间的耦合项足够小,则板球系统可按x轴和y轴方向解耦为2个相同的子系统。将系统耦合量及不确定量设为d,由式(2)得x轴的子系统状态方程为:
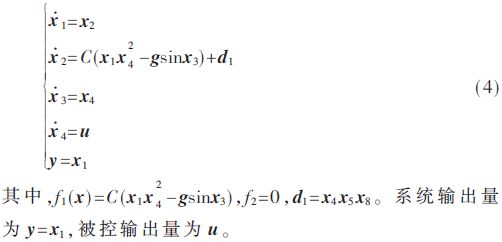
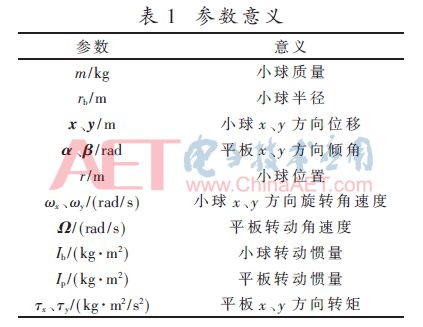
各参数含义见表1。
2 反演自适应动态滑模控制器设计
滑模变结构控制方法在对非线性系统的处理和控制中获得了广泛的应用。但常规滑模变结构控制不可避免地存在“抖振”问题。作为一种消除“抖振”的有效方法,动态滑模控制被应用到移动机器人、并联机器人、机械臂等非线性系统中。下面利用反演法,基于动态滑模控制理论,结合自适应技术,进行控制器设计,|di(t,x)|≤D(D为干扰上界)。
步骤1 令指令信号为连续函数x1,结合式(4)第1个方程,定义系统误差面为e1=x1-x1d。预选Lyapunov函数对时间求导得:

将x2作为式(5)的虚拟控制变量,设常数c1为正实数,设计反馈控制律为:
3 实验仿真及分析
3.1 实验仿真
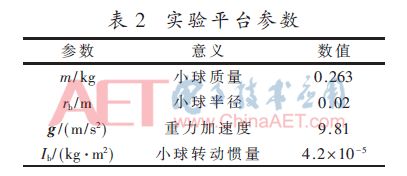
为了验证本文算法所设计动态滑模控制器的控制精度以及运行时间等性能,分别对板球系统的x轴、y轴设计轨迹跟踪模型。实验仿真环境为MATLAB 2015a, CPU为Intel Core i5,内存为DDR3 4 GB,实验平台参数如表2所示。
实验所用期望轨迹跟踪模型如式(24)所示,该模型起始点设为(0,0),幅值为0.1 m,在x轴和y轴上分别做正弦、余弦曲线跟踪。
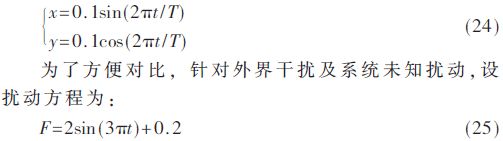
分别考虑本文算法在有扰动和无扰动情况下对期望轨迹的跟踪性能。在相同的扰动条件下,采用动态滑模对x轴、y轴及圆形轨迹的期望轨迹进行跟踪,作为与本文方法的实验对比。仿真结果数据比较见表3。

3.2 仿真结果分析
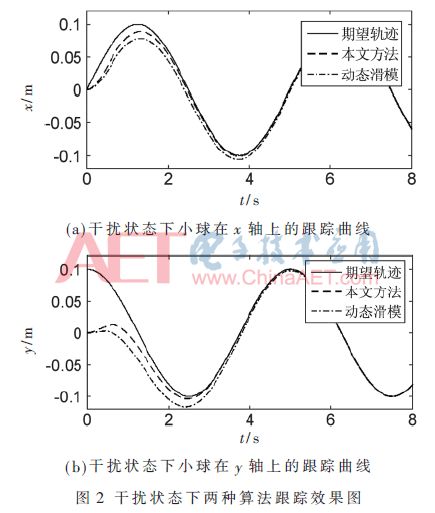
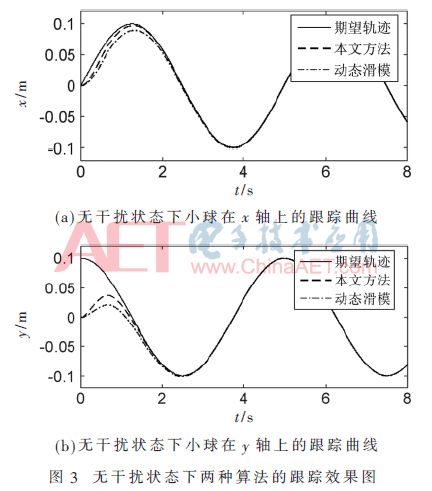
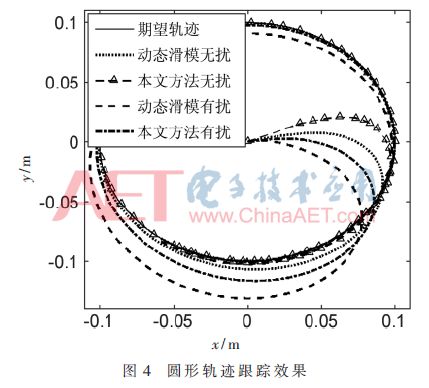
由图2(a)和图2(b)仿真结果可以看出,在受扰情况下,动态滑模体现出了一定的鲁棒性。通过与本文算法相对比,本文算法在加入自适应调整策略干扰上界预估后,在跟踪精度和快速性方面具有更好的控制性能。由图3(a)和图3(b)可知,在无扰动状态下,动态滑模和本文方法均实现了对期望轨迹的有效追踪,本文方法快速性较好,在跟踪精度方面也获得了有效提升。在图4中,分别针对不同干扰情况,采用2种算法对圆形轨迹进行跟踪,通过精度对比可知,本文方法在系统受到外界干扰的情况下,可以有效减弱干扰影响,相比于动态滑模,在控制精度与快速性方面均获得提升。
4 结论
本文以板球系统为对象,针对板球系统在不确定干扰下的轨迹跟踪精度问题,提出了一种反演自适应动态滑模控制方法。该方法应用自适应滑模控制算法对干扰边界进行估计,设计了新的切换函数,有效解决了传统滑模的抖振问题,同时提高了系统的响应速度,降低了外界干扰的影响,大大增强了系统对自身参数摄动的非脆弱性,保证了系统在Lyapunov意义下的渐近稳定性。通过与动态滑模方法进行仿真对比,表明了该方法的有效性。下一步的工作重点是结合群智能算法对控制因子进行调整,针对两轴间的耦合误差做进一步研究。
-
控制器
+关注
关注
112文章
15223浏览量
171175 -
直流电机
+关注
关注
35文章
1623浏览量
69468 -
板球系统
+关注
关注
1文章
2浏览量
2719
原文标题:【学术论文】板球系统的反演自适应动态滑模控制
文章出处:【微信号:ChinaAET,微信公众号:电子技术应用ChinaAET】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
四分之一车主动悬架的鲁棒控制和在线自适应控制
一种改进的Volterra自适应噪声对消器
基于红外摄像技术的自适应远光灯控制系统
带有未建模动态的船舶减摇鳍的鲁棒自适应控制
双向无线内窥镜系统的ARQ动态自适应包长确定方法

分层学习的自适应动态规划
提出了一种以动态响应一致性为最优目标的自适应控制策略





 工商网监
工商网监
评论