 博世在中国的自动驾驶路线图以及目前在自动驾驶各个领域所用到的各个技术的现状分享
博世在中国的自动驾驶路线图以及目前在自动驾驶各个领域所用到的各个技术的现状分享
博世认为自动驾驶从技术上,有三个不同的发展路径。其中的一个路径称作为蓝色世界,它主要针对的是未来的私家车消费者;另外一块是移动出行市场,称作为绿色世界;还有一个是泊车的路径,被称作紫色世界。
博世汽车ADAS产品经理丰浩,介绍博世在中国的自动驾驶路线图以及目前在自动驾驶各个领域所用到的各个技术的现状分享。对于全球第一大汽车技术供应商的发展思考,对未来发展有较大借鉴价值。
从中国制造2025将智能网联汽车技术作为国家的发展重心之一,到国家三部委联合发布的自动驾驶路试规范,可以看到整个中国从政府层面对于智能网联汽车,特别是自动驾驶向着量产化落地的推进,在政策的环境上面是有非常大的改进。
博世自动驾驶路线图
博世认为自动驾驶从技术上,有两个不同的发展路径。其中的一个路径称作为蓝色世界,这个蓝色世界就像传统的整车厂逐步的去进行技术升级,它主要针对的是未来的私家车消费者,买一辆自动驾驶的汽车,那么它的成本吸收能力是比较敏感的,它的使用场景也是相对简单的。比如说每天通勤,或者在高速公路上面。
另外一块是移动出行市场,称作为绿色世界,移动出行的服务商对于传感器或者技术的成本吸收能力是相对较高的,他的使用场景,由于它主要面向的是城市内的移动出勤,使用场景更为复杂的,使用频率更为高的。所以他所要面临的场景更为复杂,它需要更多的传感器。
两种截然不同的路径,蓝色世界、绿色世界带来的技术挑战也是不同的,博世在这两个市场上都做了准备,将自动驾驶逐步的进行落地。
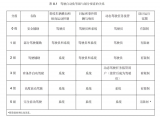
博世自动驾驶除蓝色世界,绿色世界,还有一个是泊车的路径,被称作紫色世界。在中国,大概什么时候可以把这些功能量产?可以看到在2014年博世跟吉利汽车合作,陆续的开始实现量产推出带ADAS功能的,实现L1级别的,比如说ACC,自适应巡航,自动紧急制动,车道保持,车道偏离报警功能。
博世的自动驾驶技术现状
博世公司已经有接近40个项目在中国市场上实现了量产。
在今年将首个实现L2级别的,保持单车道类的交通拥堵辅助,集成式巡航控制功能实现量产。
到2020年中左右,博世将和一家自主品牌,在中国量产第一个实现L2级变道行驶的功能,我们把它叫做高速公路辅助。到2021年底左右,博世是可以向中国市场提供第一个可以脱手的L3级功能,低速端的交通拥堵引导的功能。高速端高速公路引导的功能,博世预计2023年以后才能在中国市场落地。
在泊车的路径上,博世目前在市场上已经实现了半自动泊车到全自动泊车辅助的功能。接下来博世会对这些所谓的辅助功能,升级到引导功能,这些引导功能可以将人排除在自动泊车的范围之外。在自动泊车的路径上,无论全自动泊车还是遥控泊车,它都是对车本身的一个技术的升级。
博世还有另外一个路径叫全自动代客泊车,它对基础设施和互联有很高的要求,它实现的是一个车与基础设施之间进行互联的泊车方式,可以实现无人的让车自动去找车位的。目前博世跟戴姆勒公司在德国的奔驰博物馆做了这样一个演示项目,预计在今年或者明年初将这样一个演示项目在中国来进行落地。
在自动驾驶的关键技术上,博世有感知、决策、执行三个层面累积。
在感知层面,博世除了已有毫米波雷达,视频摄像头,还在为自动驾驶L3以上的一些关键传感器技术进行开发;比如激光雷达,博世目前也在做激光雷达相应的量产研发工作。博世有针对于自动驾驶未来复杂场景下多目标、高可靠性的探测能力,并研发下一代的传感器,包括了毫米波雷达,下一代的前置摄像头,同时增加的很多结构化的算法,还引入了可量产化的人工能的算法。
博世在布局下一代的环视摄像头以及近距离系统,下一代的超声波雷达;而除了针对于下一代的高级泊车系统进行开发之外,还基于下一代的超声波系统提供低速行驶的安全功能,这得益于博世第六代超声波传感器运用了先进的编码方式来进行调制,以及增加它的系统刷新时间,可以让这种泊车系统也能够对于一些低速的障碍物进行反应,这样可以提供一些成本非常低的安全性功能,比如说低速的紧急制动的功能。
在摄像头上,博世用了一个对场景语义理解的模式,除了对传统的分类进行检测之外,还会对于画面的光流进行检测,以及通过卷积神经网络对于像素进行语义理解。通过这套算法,可以对于画面上很多的低矮的物体,甚至传统的模型检测比较有困难的物体进行非常好的检测。在语义检测方面,博世将卷积神经网络的算法集成到控制芯片,提高环境感知的探测能力,可将车甚至自行车上的人以及自行车做到一个很好的区分。
下一代的雷达上,博世做了较多改进,比如提高了探测距离,提高了可探测目标的数量,以及其多角度分辨率,带来的好处是,对于原始的环境感知得到更多的测量点。下一代的雷达针对道路边界进行还原,这个雷达博世称作散状点云,它的反射量比现在增加的非常多。从无线电管理的趋势来看,中国在5G的应用上得到了政府非常多的支持。下一代雷达可以通过提高可占用带宽用高频幅的无线电资源,一个是可以提高本身雷达的探测能力,另外,大大的增加对于一些近的目标的分辨率。
同时,在L3以上,需要将人排除在外,博世在对驾驶员的状态进行监控,到L4级别,驾驶人可能不在驾驶位置上,而驾驶员监控摄像头以及乘员监控摄像头上要有相应的研发。
在高精定位上,博世有一个产品——车辆运动与定位传感器,它主要提供一个车辆的定位修正复位,以及提供一个高精定位传导的传感器。
博世目前在中国跟三家主要的图商都有合作,基于众包的模式,将这种道路的关键的信息点通过毫米波雷达,将它叠加到我的地图上,可以实现1+1大于2的系统,帮助应对恶劣天气环境或者GPS信号不足的情况下提高它的定位精度。
在决策层面,博世从目前的单一横向以及纵向控制都有已经量产的功能,未来我们在数据融合方面以及自主的决策算法方面也有非常大的提升。
在执行层面,博世对于车辆的运动控制,有对于传统的制动、加速、以及转向方面的能力,特别博世在2014年在采埃孚和天合并购的过程中,将原来博世与采埃孚合资的转向系统现在也完成成为博世的一个子公司,那么叫博世转向系统。因此,拥有了对于自动驾驶在整个生态链里最关键的几个核心技术。
当然在自动驾驶的过程中,必不可少的是对本土路况的适应,博世在本土移动目标的探测上,本土的交通标识的识别上做了非常多的努力,在中国目前已经积累了超过600万公里的数据实现对这些功能更好的支持。
在数据融合方面,博世拥有对于传统的毫米波雷达,激光雷达多种传感器融合的能力,通过这些数据融合,提出自动驾驶集成式的架构,提高自动驾驶系统的运算能力。
博世的绿色世界
在中国,有另外一股崛起的势力,除了像传统的整车厂以及传统的汽车零部件之外,非常多的跟人工智能以及自动驾驶软件相关的初创公司,这些公司在中国大概有多少家呢?据统计,大概接近200家的规模。他们在很多的领域,特别是软件方面有非常多的优势,这促成了博世跟这些初创公司进行合作的契机。
博世认为自动驾驶在移动出行领域称为绿色世界。从L4起步面向终端出行的功能,博世称为移动的自动驾驶出租车。在全球,博世目前跟戴姆勒公司有一个量产项目在开发,在2021年底左右在德国面向部分城市开放这样的运营服务。首先,让你能够自动叫一辆出租车来接你,然后自动的把你带到目的地。这个是针对城市的场景,它可以做到完全的无人。
在中国,博世更多考虑到,一是整车厂的技术升级,同时,与初创公司进行合作探讨。但是,从整个的行业来看,L4阶段的到来时间还不会那么早,因为L4面对的主要是城市环境,做量产的话,还要有非常多的路试工作。当然,从L1的开发过程中,我们看到了很多的问题,这些问题其实在L3、L4的开发过程中都会遇到,需可量产化的解决方案,所以在中国的时间点会稍微晚一些,但是趋势。
-
人工智能
+关注
关注
1776文章
43845浏览量
230596 -
自动驾驶
+关注
关注
773文章
13032浏览量
163209 -
智能网联
+关注
关注
4文章
565浏览量
23104
原文标题:博世自动驾驶路线现状与L4/L5的中国方案
文章出处:【微信号:IV_Technology,微信公众号:智车科技】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
未来已来,多传感器融合感知是自动驾驶破局的关键
LabVIEW开发自动驾驶的双目测距系统
农机自动驾驶显示系统组成部分以及配置
自动驾驶点云标注技术的现状与未来发展
汽车自动驾驶现状及挑战

我国自动驾驶领域立法现状
车路协同式的自动驾驶(VICAD)

自动驾驶基础架构
自动驾驶与车路协同







 工商网监
工商网监
评论