 利用基于R-树连续最近邻查询算法来渲染雨滴,形成了逼真的下雨天场景图
利用基于R-树连续最近邻查询算法来渲染雨滴,形成了逼真的下雨天场景图
摘要:自动驾驶领域最近的发展表明,这些车辆在不久的将来会出现在每个城市的街道上,而这些城市不会容忍交通事故的发生。为了保证安全需求,自动驾驶汽车和被使用的软件必须在尽可能多的条件下进行详尽的测试。通常被考虑的影响因素越多,测试越全面,一般情况下,汽车就越安全。然而,在每次产生或希望产生特定的场景之前,都要反复地记录相同的测试集,这是一种非常耗费时间和资源的过程,特别是在使用真实车辆测试的时候。这就需要用环境模拟进行仿真测试。
本课题通过对环境的仿真模拟,研究了影响自动驾驶车辆传感器的环境因素。主要模拟了下雨环境中,挡风玻璃上的雨滴是如何影响摄像头成像的。我们提出了一种新的方法,利用基于R-树连续最近邻查询算法来渲染雨滴。摄像头前的3D场景由立体图像生成,这些水滴被设置了真实的物理特性。所构建的模拟环境真实,派生的图像可以用来扩展用于机器学习的训练数据集,而不必强制获取新的真实图像。
这篇论文的第一作者为 Alexander von Bernuth, 来自德国图宾根大学Wilhelm Schickard计算机科学研究所计算机工程系主任。
Rendering Physically Correct Raindrops on Windshields for Robustness Verification of Camera-based Object Recognition
Alexander von Bernuth, Georg Volk and Oliver Bringmann University of Tubingen, ¨ {bernuth, volkg, bringmann}@informatik.uni-tuebingen.de
恶劣天气状况仿真模拟测试的必要性
自动驾驶汽车将使世界各地的研究人员和制造商在很长一段时间内都处于忙碌的状态。这是因为自动驾驶汽车在未来可能会成为公共交通的主导,而且必须经过彻底的安全验证。如果像车辆或行人检测这样的关键系统没有进行最全面的测试,这个检测覆盖所有能想到的环境影响,以及所有可能的组合,难以想象会发生什么。比如在阴天的阳光下,有背光和脏镜头的情况。
在测试过程中希望随机遇到或者刻意设计所有这些边缘场景的组合,看起来都非常愚蠢的。根据分析师的观点,一辆载有所有待测试技术的汽车必须以109公里的速度驾驶没有出错,才有资格获得ISO 26262 [1]标准。此外,车辆的任何部分接收到更新时,都需要重新运行所有测试。
因此,许多制造商面临的主要挑战之一是时间密集型测试,特别是在原型车中调度大量的测试驱动程序。一种可能的解决方案是依靠一个相对较短的驱动器,并通过模拟不同的环境影响因素通过随机组合来生成多个版本。虽然目前已经有人对这些环境影响因素进行了一些模拟研究,但尚未探索的天气条件和影响仍然很多。
我们自己的调查得出的结论是,下雨时,如果不是暴雨,不会影响目标或交通标志检测算法。因此,本文研究了在相机或相机镜头前挡风玻璃上放置被渲染的雨滴以及这些雨滴对物体识别算法的影响。本文的第一部分将综述了其他学者的研究,重点研究在摄像机前和摄像机上模拟雨和尘埃等影响。第二部分关注的是水滴的产生,从场景重建开始,到我们的射线追踪法结束。之后,第三部分将介绍结果和应用。在第四部分中,我们讨论调查结果并提出可以改善方法和未来工作。
下雨场景天气模拟研究现状
大多数与天气和环境相关的模拟研究都集中在游戏中的直接使用或合成场景的渲染,只有很少的研究考虑到环境的物理特性。到目前为止,所有的论文作品都没有研究雨滴在镜头前的影响,但在某些情况下,他们对水滴的描述非常准确。Starik 和 Werman 的工作使用了3D场景,该场景假设在任何地方都具有相同深度[2]。他们从视频中提取雨的特征,并将学习过的蒙版应用到没有下雨的图像上。然而他们忽略了单个雨滴的物理特性,如果从视差图中提取场景的深度,考虑更确切的情况可能会有更好的结果[3],[4]。实现上述这些是可行的,因为作者在视频采集时使用的是立体相机,他们用摄像头和物体把空间分隔成小部分,通过计算这些部分的正确雨量并在OpenGL中渲染雨滴。
Hospach和Muller研究把雨滴抽象成非常薄的三角形,它们呈现出多彩的白色,并且他们混合比例基于降雨强度。这个技巧需要快速显卡来支持渲染。他们忽略了折射等效果,因为差异很小。
Wang等人使用光线追踪来渲染雨滴,这种方法依赖于光源精确位置信息[5]。作者将来自不同光源的光线射向所有雨滴,并根据 Phong 照明模型计算像素颜色。不发光的物体被筛掉,而且不会在雨滴中发生折射。
与本文相比,最相似的论文是T. Sato的论文,但是他们为了满足实时约束做了许多简化的假设[6]。作者将视频图像映射到摄像头的前面单个半球,而不管物体与摄像头的真实距离如何。然后,他们向雨滴占领的每个像素投射光线,并检查这些光线与半球接触形成的图像。相应的像素值将在渲染雨滴时用作纹理元素。
许多研究雨滴在挡风玻璃上的研究人员关注的是它们的定位、合并和移动。不同的工作大都集中在模拟流体动力学[7]-[11]。 Extrand等人研究放置在倾斜表面上的水滴的形状,如玻璃板[12]。 Garg和Nayar [13]做了更多有关下落过程水形状的研究。此外,还有人在竭尽全力描述水滴的物理和光学特性[14]。不同的研究人员采用了完全不同的方法,有人通过检测并去除图像中的雨滴,而不是创建这些雨滴[15],[16]。由于所描述的方法利用了一些有趣的物理性质,因此可以从移除雨滴的方法中学到很多东西。
之前发表的论文都局限于单一的雨滴,静止和下降,忽略了相机的环境是三维场景。要么他们完全忽略了深度,要么作出广泛的假设,也忽略了水滴中场景物体的正确折射。我们的方法将所有这些考虑在内。仿真结果接近于真实照片,这对于训练神经网络的数据集来说是非常必要的。
点云渲染的方法
关于点云的渲染,现有许多不同的方法。一种是创建一个表示曲面的网格,并将图像作为纹理映射到它们上[17]。其他人也使用大量的预处理来创建多个深度图并逐步细化渲染[18]。但即使网格划分简单且便宜,我们也不得不填补出现在树木或汽车等物体后面的间隙。如果不是固定的,这些缝隙可能会导致黑点,因为它们可能会将光线折射到通常看不见的区域。
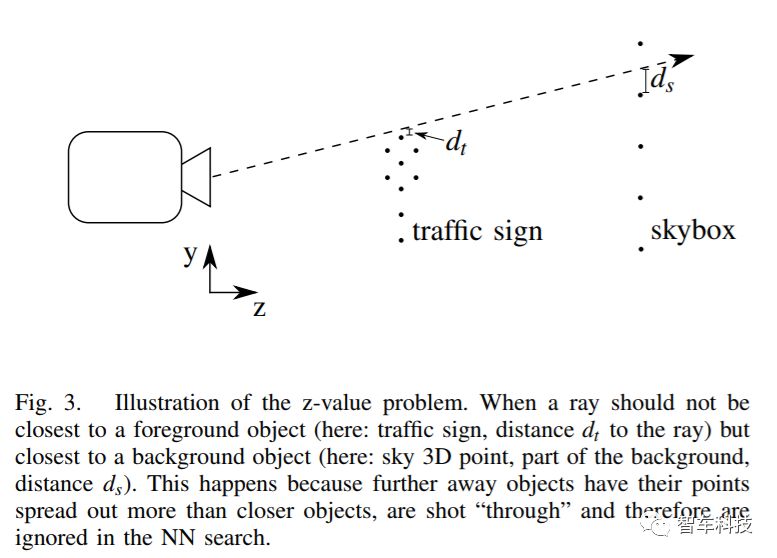
Schaufler和Jensen将光线射入点云并搜索超过某个阈值的点密度[19]。在一个范围内的所有点都被用于表面法线和位置的插值。这样就避免了昂贵的3D重建。不幸的是,如果没有足够的点或没有足够密集地采样,表面上可能会出现孔。这些孔将表现为黑色区域,并且尤其出现在具有非常不同深度的物体的边缘附近,例如在天空的前方看到一个交通标志。 Adnoni等人提出了另一种寻找线段最近邻的方法 [20]。它们在高维搜索时使用近似值。
Adnoni等人提出了另一种寻找线段最近邻的方法 [20],它们在高维搜索时使用近似值。这不一定适用于我们的用例,并且涉及复杂的数据结构,这对我们做三维来说太难了。
上面提到的所有论文都没有将雨滴的真实渲染环境和有限场景中找到相应的对象并用最先进的目标检测算法结合起来。本文将完成以上所有内容,并额外展示了训练渲染图片的神经网络模型,这可能会给现代物体识别带来帮助。
基于最近邻查询算法的雨滴下落仿真
为了描述出物体折射和雨滴渲染相结合的场景,必须将其作为点云以3D形式再现。这个过程需要了解场景的深度。可以使用对极几何(对应于深度的视差图)或利用LiDAR或其他传感器来计算每个像素与相机距离的深度图。场景计算完成后,必须对挡风玻璃上的雨滴进行建模。我们用一个简单而强大的抽象模型:每一滴水都被挡风玻璃切断的球体所代表。
这就看起像一个球形帽,起码在几何上很容易处理。然后,光线会投射到由投影面积的每个图像像素上,并在这些像素中发生折射。产生的射线被发送到场景中,并搜索点云中最近的位置。这一点的颜色决定了降落的像素颜色。搜索两百万个点中的其中一个点的最近邻点可能是微不足道而且是快速的,用同样的方法搜索空间中的一条线就显得非常费劲。只有使用连续最近邻搜索才能使此方法可行。
1.场景重建
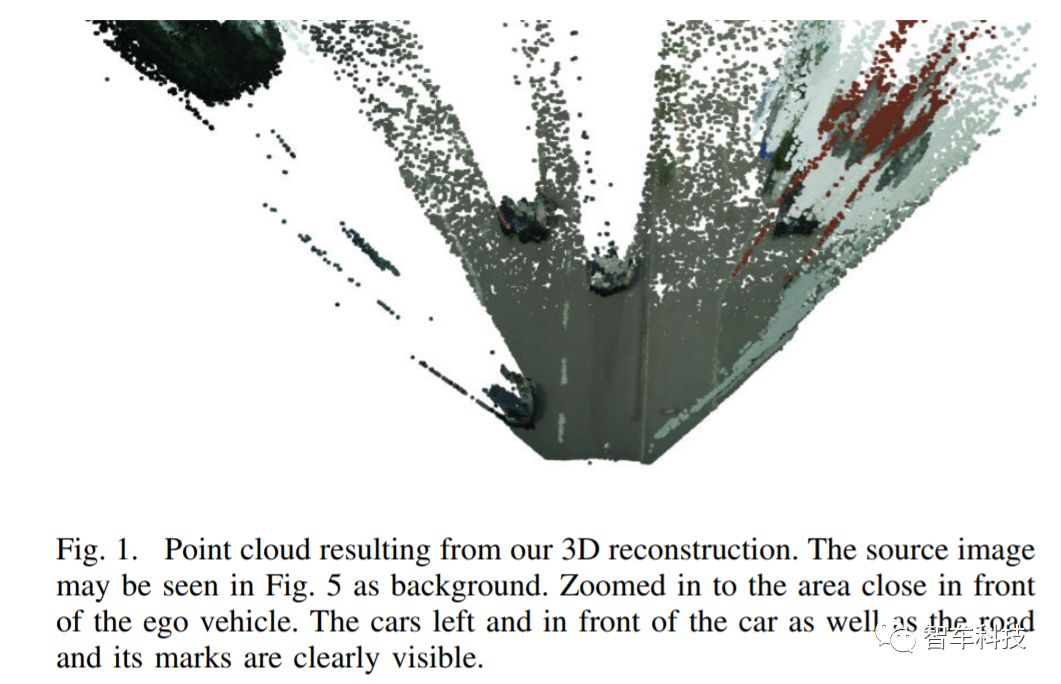
第一步是摄像机前场景的三维重建。在处理来自(校准过的)立体相机的图像时,可以使用立体重建计算相机到每个像素的距离[21]。其他方法也可以用额外的传感器,如LiDAR来捕捉深度。我们用的数据集是Cityscapes[22]中的图像。它由数千张包含各种街景的图片组成,使用立体相机拍摄,并带有预先计算的视差图。这些可以很容易地转换成深度图。 VIRES虚拟测试驱动软件[23]是我们使用的具有相应深度图像的另一个来源。深度图非常精确,因为它们基于地面实况数据。此外,可以使用汽车(用户或计算机控制的),行人和其他障碍物快速构建自定义场景。我们用于物体检测的图像来源是KITTI数据集[24]。深度图使用Hirschmuller匹配算法 [25] 的OpenCV来计算。
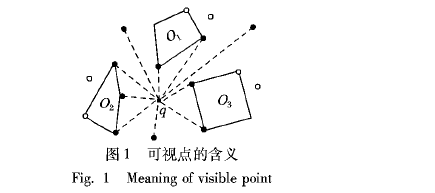
结合深度和颜色信息,我们可以定位摄像头的三维位置。通过公式可以求得所有像素组成的3D点云,如图1所示。这些点云呈现了在渲染雨滴场景中物体的图像。
2.下落模型
一旦完成3D表示,就有必要在虚拟挡风玻璃上创建和分配雨滴。 单个雨滴被模拟为球帽状。这个帽子的特点是它的中心c,半径r,高度和法线n(从基座指向圆顶)。生成雨滴意味着设置固定的z值(从相机到挡风玻璃的距离),随机或故意设置每个雨滴的x和y坐标,高度和半径。当高度和半径相关时,一个值就能通过另一个值求得[26]。 我们选择h = tan(θ/ 2)·d,其中h表示液滴高度,θ表示液滴的接触角,d表示液滴直径。 Park等人在观察半径为2mm的液滴时,接触角θ被确定为大约87° [27]。 相应的法线简单地指向与相机视角矢量相同的方向。当向前倾斜挡风玻璃时,所有下降中心和法线也围绕x轴旋转。
3.折射
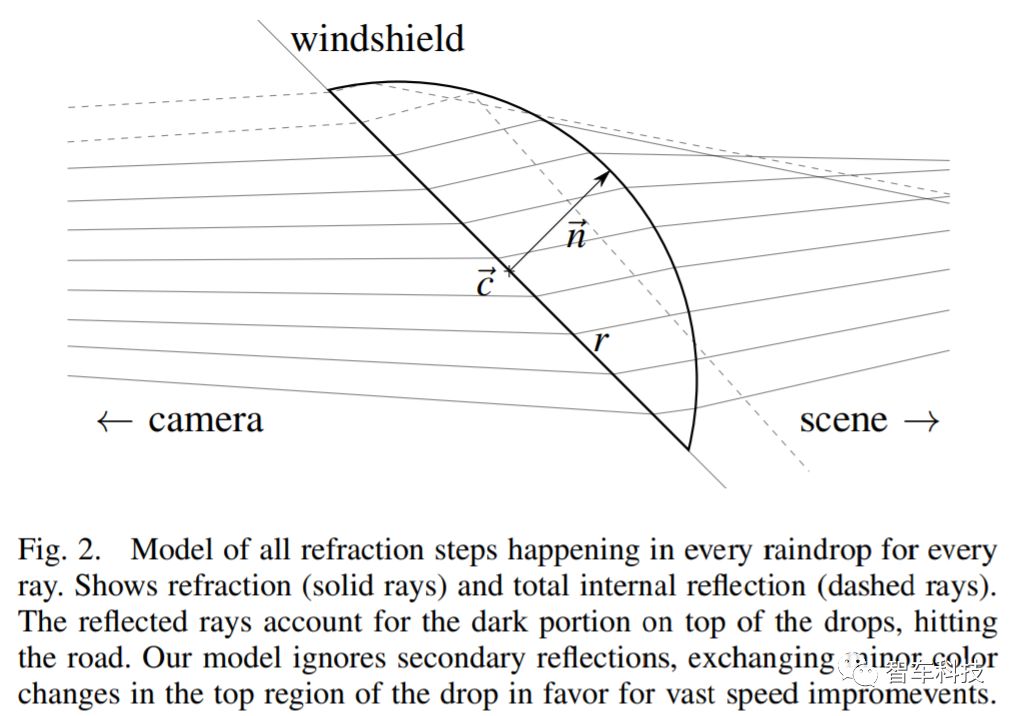
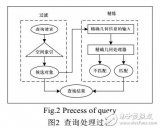
在折射场景形成之前,我们将从相机发出的光线照射到图像平面中的每个像素。为了减少计算工作量,只有光线落在圆点的后面(具有中心,半径和法线的圆)才被跟踪。所有其他光线都被丢弃,并且来自原始图像的像素值被用于最终的图像。在雨滴下落的过程中,我们折射的射线遵循斯奈尔定律。有关折射的更多信息,请参阅已建立的文献[28]。折射的光线落在雨滴内, 然后,通过生成垂直于法线的随机矢量并且只要下降半径来计算球体的中心。加上正常缩放到半径长度,我们现在有四个点位于球体上,足以计算球体的中心[29]。在全内反射的情况下,所得到的光线不会被进一步折射。每种折射的视觉表示可以在图2中找到。
4.最近邻查询算法
接下来,我们将计算光线中最近邻的像素来推迟光线等效像素的颜色。此点的颜色分配给相应的像素,并在展示位置中可见。找到神经网络的一个非常简单的方法是查看每条射线的每个点,计算从该点到射线的距离并取最近的点。即使在允许快速最近邻(NN)查询的R树中组织点后,也可以对光进行采样,并搜索每个样本的NN。最后,我们选择了连续最近邻搜索[31],因为它不仅提供了一个精确的最近邻点,而且在包含超过两百万个点的大型点云中,很短时间内(仅仅是毫秒)就能完成搜索。
在数据集里评估该算法的质量
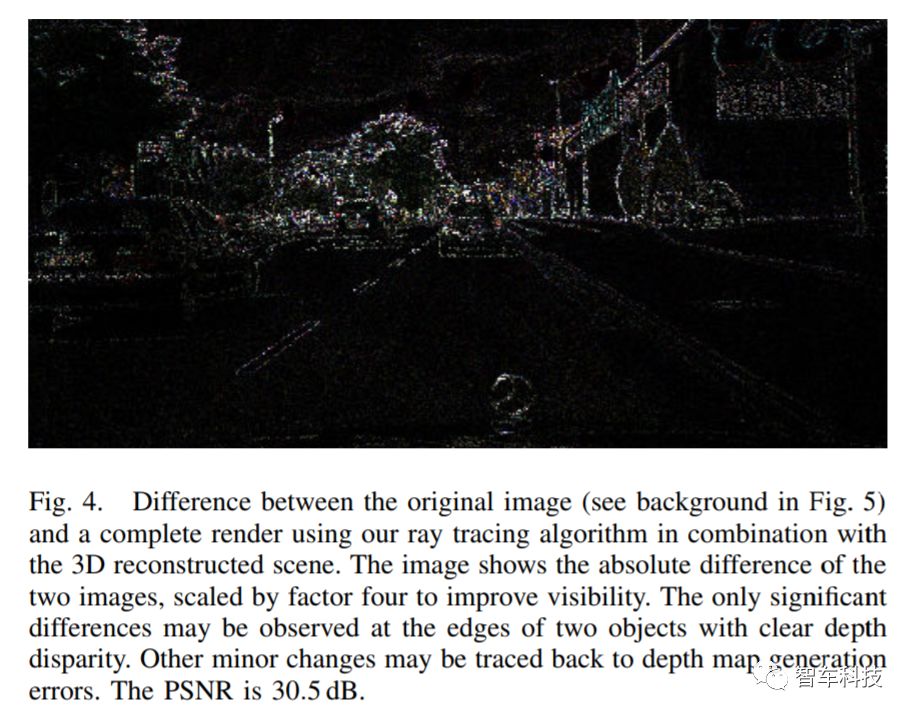
为了评估我们的光线跟踪算法的质量,我们用完全渲染场景,忽略雨滴和拍摄光线通过每个像素进行对比。这允许进行详细的错误检测。在图4中可以由相减图像和取绝对值的差分图像。像素越亮,两个图像之间的差异越高。显然,不同深度的物体的边缘显示出不同的差异。这是因为前面提到的Z值问题,但远好于完全没有修正情况下的识别。
作为雨滴渲染的例子,我们从Cityscapes数据集中获取一幅图像,随机生成雨滴并渲染了这些图像。结果可以在图5中找到。
为了测试物体识别算法的能力,我们将其应用于KITTI数据集中排名最高的神经网络模型算法中。可以预料到的是,大雨滴可能会遮挡像行人的小物体或行驶车辆的部分外观,可能会让在完美图像上训练过的神经网络产生混淆。
我们使用的网络是一个单阶段对象检测网络[31]的循环滚动卷积(RRC)网络。它目前在KITTI数据集中排名第四。利用相应的立体图像重建了450个KITTI数据集的模拟雨滴场景。这些图像用作RRC网络的输入。使用没有雨滴的相同图像做为对比。这个过程的概述可以在图6中找到。
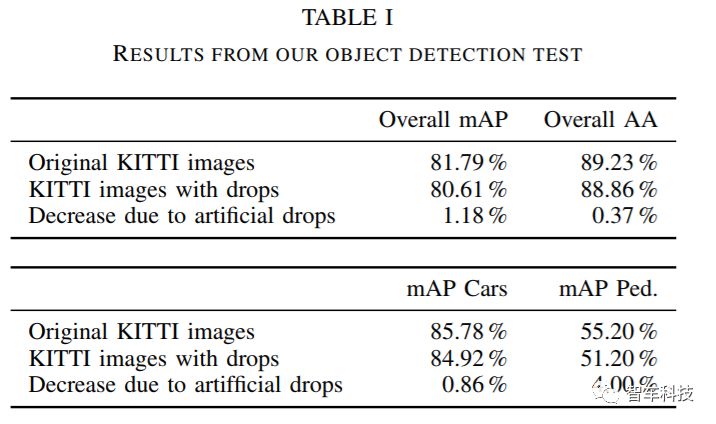
通过计算中[35]常用的测量平均精度(mAP)来评估结果。表I中的结果表明,当图像中存在雨滴时,总体平均精度下降了1.18%,整体平均精度下降了0.37%。 此外,我们发现像行人这样的小物体更容易被雨滴遮挡(mAP减少4%),而不像汽车这样的大物体。在顶部神经网络的识别率相差百分之零点几的时候,即使是很小的改进,也会给予其他人很多帮助。

该研究的结果与应用
这项研究提出了仅基于一对立体图像的人为创建雨滴方法。物理上正确的折射和反射包含在我们的模型中,以及一些允许更快开发的简化。然而,结果是显著的。我们在一个倾斜的挡风玻璃上实现了照片真实的雨滴下落,并呈现了他们折射出的所有物体。尽管雨滴用球帽状做了简化,但我们的水滴看起来很逼真。
我们的光线跟踪方法产生了一个3D场景的近乎完美的渲染,没有昂贵的网格和纹理的预计算。甚至像交通标志这样的小物体也不会在整个场景中丢失;车牌中的字母也是可读的。这是可能的,而3D场景重建依赖于特征匹配和具有离散值的视差图。神经网络处理的对象检测,另外训练与雨滴准备的图像可以获得更好的结果,并超越其他竞争对手。这项工作可以导致更好的整体得分和鲁棒性的传感器缺陷,这些机器学习算法。
处理目标检测的神经网络还额外使用雨滴制作的图像进行训练,取得良好的效果。这项工作可以为这些机器学习算法提供更好的总体分数和鲁棒性。 到目前为止,我们的连续NN搜索运行在最多8个CPU内核上(这是我们的CPU,Intel i7-7700K提供的最高线程数)。在那里,每个KITTI图像的运行时间大约3分钟。雨滴越小越少,计算速度越快。
该算法的一个有趣的应用可能是使用它生成图像,作为Iseringhausen等人工作的输入[37]。他们在场景前面的玻璃板上使用水滴作为光场照相机,这些水滴在不同位置上用作多个镜头。通过逆向工程设计投影形状,他们可以推断出背后的场景,并能从不同的角度创建3D渲染图,这正好与我们的工作相反。
-
驱动器
+关注
关注
51文章
7308浏览量
142942 -
神经网络
+关注
关注
42文章
4572浏览量
98746 -
自动驾驶
+关注
关注
773文章
13032浏览量
163210
原文标题:IEEE IV 2018:如何构建出逼真的下雨天场景,来验证物体识别的鲁棒性?德国图宾根大学做到了
文章出处:【微信号:IV_Technology,微信公众号:智车科技】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
Python实现k-近邻算法
Python实现k-近邻算法
下雨天电机绕组温度明显升高是为什么?
移动对象历史轨迹的连续最近邻查询算法
基于Hilbert曲线的近似k-最近邻查询算法
改进的共享型最近邻居聚类算法
路网环境下的最近邻查询技术
基于近邻传播的迁移聚类算法

DeepFocus,基于AI实现更逼真的VR图像
下雨天驾驶电动汽车时有什么需要注意的安全事项
一种基于自然最近邻的密度峰值聚类算法

下雨天会影响手机信号的原因
基于改进的Canopu和共享最近邻的聚类算法






 工商网监
工商网监
评论